Indoor-Kartierung mit Rucksack
Das Ellipse-D RTK INS hilft bei der SLAM-Berechnung und synchronisiert LiDAR und Kamera.
"Wir arbeiten nun schon seit Jahren mit SBG Systems und insbesondere mit der Ellipse Serie zusammen. Wir haben uns immer auf diese robusten Trägheitssensoren verlassen." | Jérôme N., Gründer von VIAMETRIS
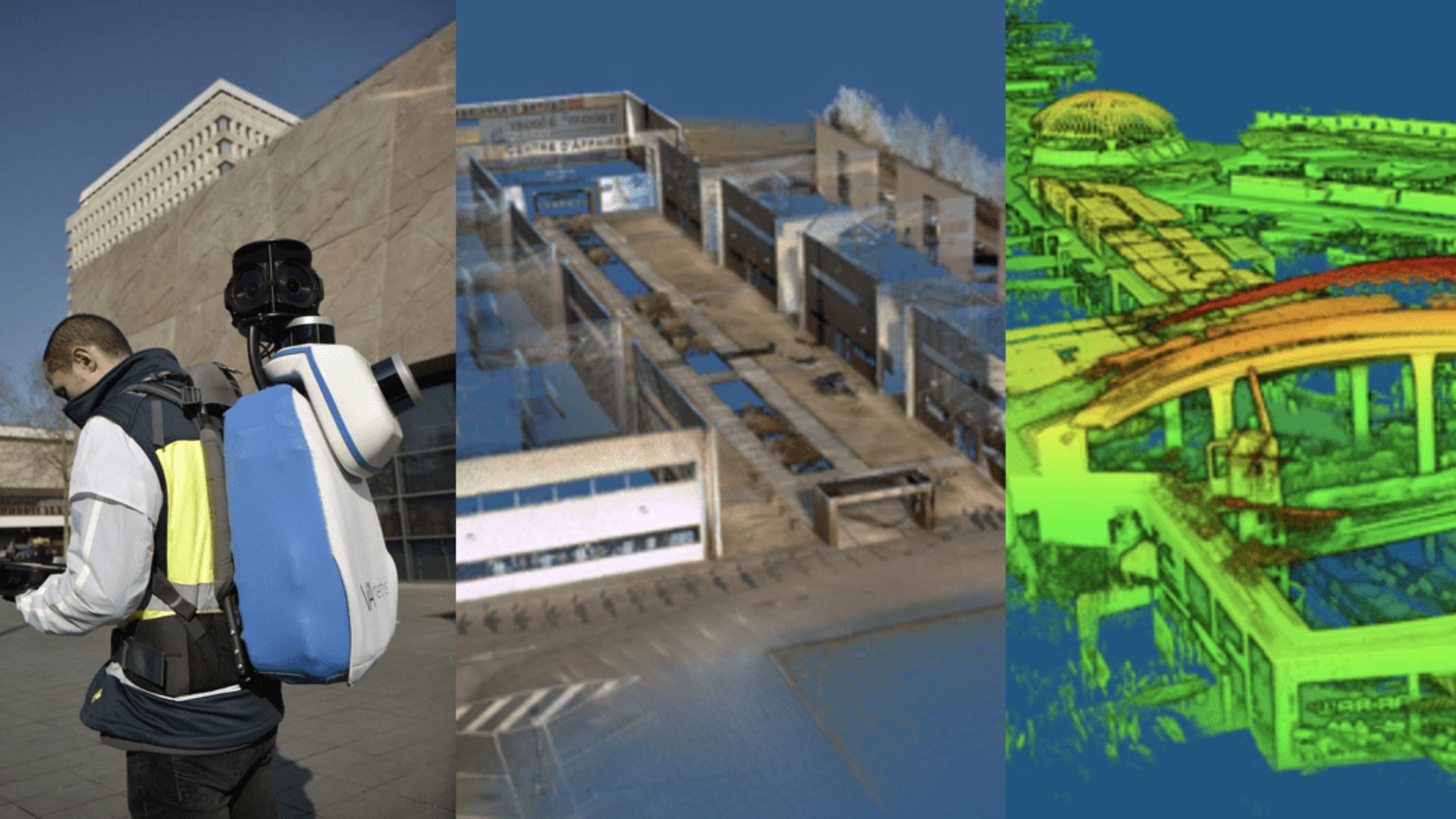
Rucksackbasiertes mobiles Scansystem
Das bMS3D-360 wurde für die anspruchsvollsten Umgebungen entwickelt. Es umfasst zwei Velodyne LiDAR-Sensoren, eine 360-Grad-Ladybug-Kamera, das Ellipse-D, das SBG-Trägheitsnavigationssystem mit internem L1/L2 GNSS-Empfänger, und einen Computer.
Ein um das 7-fache beschleunigter Workflow
Der Arbeitsablauf ist einfach. Der Vermesser startet das System, überprüft auf einem Tablet, ob die GNSS- und Trägheitsinformationen berechnet werden, und startet die Vermessung.
Zurück im Büro startet der Benutzer die INS/GNSS Post-Processing Software, um die Orientierungs- und Positionsgenauigkeit zu erhöhen, und verwendet dann die VIAMETRIS-Software, um die Punktwolke zu georeferenzieren und zu kolorieren.
Die gesammelten Daten können in die gängigste Designsoftware importiert werden. Dieser Arbeitsablauf wird im Vergleich zu einer traditionellen Methode um das 7-fache beschleunigt.
Es fehlen keine Daten; die Punktwolke kann für weitere Messungen verwendet werden, was eine Einsparung von Zeit und Reisekosten bedeutet.
Zusätzlich zu der bewährten Leistung des bMS3D-360 machen einige Details den Unterschied auf dem Markt aus, wie z. B. die 360-Grad-Kamera, die sich auf einer einziehbaren Stange befindet, um im ausgefahrenen Zustand ein größeres Sichtfeld zu haben und im eingefahrenen Zustand eine höhere Sicherheit zu gewährleisten (einige Dächer können sehr niedrig sein, z. B. auf Parkplätzen).
Es ist der einzige Rucksack, der eine solche Kamera anbietet, was die Bearbeitung erheblich vereinfacht. Bei der Navigation in der Punktwolke öffnet der Benutzer ein einzigartiges Bild der 360° gescannten Umgebung, anstatt 4 verschiedene Kamerapunkte zu betrachten.
Wenn das GNSS Störquellen ausgesetzt ist, hält das INS die Trajektorie aufrecht, wo die SLAM-Technologie begrenzt ist.
Das RTK INS zur Unterstützung der SLAM-Berechnung
Das Ellipse-D ist ein sehr kompaktes Trägheitsnavigationssystem, das einen L1/L2 GNSS-Empfänger integriert. Dieses INS in Industriequalität berechnet Roll-, Nick-, Gierwinkel sowie die Position dank der eingebetteten erweiterten Kalman-Filterung.
In Echtzeit werden die Ellipse-D Orientierungsdaten verwendet, um die Geräteausrichtung zu korrigieren und die SLAM-berechnete Kursrichtung zu unterstützen.
Wenn die SLAM-basierte Kursrichtung mit 20 Hz bereitgestellt wird, wird die trägheitsbasierte Kursrichtung mit 200 Hz geliefert. Zwischen zwei SLAM-Informationen hält das INS die Kursrichtung robust.
Der GNSS-Empfänger liefert eine absolute Positionierung der Punktwolke und fügt eine Höhenbeschränkung hinzu. Wenn Störungen das GNSS beeinträchtigen, hält das INS die Trajektorie aufrecht, wo die SLAM-Technologie versagt. Zum Beispiel sorgt das INS auf Parkplätzen ohne nahegelegene Objekte für die LiDAR-Messung für eine genaue Navigation.
Jérôme Ninot, Gründer von VIAMETRIS, erklärt diese Wahl: “Wir arbeiten nun schon seit Jahren mit SBG Systems und insbesondere mit der Ellipse Serie zusammen. Wir haben uns immer auf diese robusten Trägheitssensoren verlassen, und als es darum ging, ein INS/GNSS-System für unseren Rucksack auszuwählen, waren wir froh, dass die Ellipse-D bereits einen GNSS-Empfänger integriert hatte.”
Es ist immer ein Zeitgewinn, keine zusätzliche Ausrüstung zu integrieren, betont Jérôme.

Ellipse-D
Die Ellipse-D ist ein inertiales Navigationssystem, das eine Dual-Antenne und ein Dual-Frequenz RTK GNSS integriert und mit unserer Post-Processing-Software Qinertia kompatibel ist.
Entwickelt für Roboter- und Geodatenanwendungen, kann es den Odometer-Eingang mit Pulse oder CAN OBDII für eine verbesserte Koppelnavigation-Genauigkeit verschmelzen.

Fordern Sie ein Angebot für Ellipse-D an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Was ist GNSS vs. GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, aber sie beziehen sich auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. GNSS umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, wobei GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine verbesserte Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen Einschränkungen aufweisen kann.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die Lage (Nick-, Rollwinkel) und den Kurs (Gierwinkel) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, darunter Gyroskope, Beschleunigungsmesser und Magnetometer, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick-, Roll- und Gierwinkel) aus, wodurch ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, bei UAVs, in der Robotik und in Marinesystemen eingesetzt, um genaue Lage- und Kursdaten zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Zeitverlauf. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum zu schätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die in AHRS (Gyroskope, Beschleunigungsmesser) enthaltenen Sensoren, kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten und sich oft mit externen Daten wie GNSS integrieren, um die Genauigkeit zu verbessern.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Kurs) konzentriert, während INS eine vollständige Suite von Navigationsdaten einschließlich Position, Geschwindigkeit und Orientierung bereitstellt.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Inertial Measurement Unit (IMU) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU (Inertiale Messeinheit) liefert Rohdaten über die lineare Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, gemessen von Beschleunigungssensoren und Gyroskopen. Sie liefert Informationen über Roll-, Nick- und Gierbewegungen sowie die allgemeine Bewegung, berechnet jedoch keine Positions- oder Navigationsdaten. Die IMU ist speziell darauf ausgelegt, wesentliche Daten über Bewegung und Orientierung weiterzuleiten, die extern verarbeitet werden, um Position oder Geschwindigkeit zu bestimmen.
Ein INS (Inertial Navigation System) hingegen kombiniert IMU-Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Orientierung eines Fahrzeugs über die Zeit zu berechnen. Es integriert Navigationsalgorithmen wie die Kalman-Filterung zur Sensorfusion und -integration. Ein INS liefert Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Orientierung, ohne auf externe Positionierungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in GNSS-verweigerten Umgebungen, wie militärischen UAVs, Schiffen und U-Booten.
Wie kann ich Inertialsysteme mit einem LIDAR für die Drohnenkartierung kombinieren?
Die Kombination von Trägheitssystemen von SBG Systems mit LiDAR für die Drohnenkartierung verbessert die Genauigkeit und Zuverlässigkeit bei der Erfassung präziser Geodaten.
So funktioniert die Integration und so profitiert die drohnenbasierte Kartierung davon:
- Eine Fernerkundungsmethode, die Laserimpulse verwendet, um Entfernungen zur Erdoberfläche zu messen und eine detaillierte 3D-Karte des Geländes oder der Bauwerke zu erstellen.
- SBG Systems INS kombiniert eine Inertial Measurement Unit (IMU) mit GNSS-Daten, um eine genaue Positionierung, Orientierung (Nick, Roll, Gier) und Geschwindigkeit auch in GNSS-abgelehnten Umgebungen zu ermöglichen.
Das Trägheitssystem von SBG ist mit den LiDAR-Daten synchronisiert. Das INS verfolgt präzise die Position und Orientierung der Drohne, während der LiDAR die Gelände- oder Objektdetails darunter erfasst.
Durch die Kenntnis der genauen Ausrichtung der Drohne können die LiDAR-Daten präzise im 3D-Raum positioniert werden.
Die GNSS-Komponente bietet globale Positionierung, während die IMU Echtzeit-Orientierungs- und Bewegungsdaten liefert. Die Kombination stellt sicher, dass das INS auch dann die Flugbahn und Position der Drohne verfolgen kann, wenn das GNSS-Signal schwach oder nicht verfügbar ist (z. B. in der Nähe von hohen Gebäuden oder dichten Wäldern), was eine konsistente LiDAR-Kartierung ermöglicht.
Was bedeutet simultane Lokalisierung und Kartierung?
Simultane Lokalisierung und Kartierung (SLAM) ist eine rechnergestützte Technik, die es einem Roboter, Fahrzeug oder Gerät ermöglicht, eine Karte einer unbekannten Umgebung zu erstellen und gleichzeitig seine eigene Position innerhalb dieser Karte zu bestimmen.
Es kombiniert Daten von verschiedenen Sensoren (z.B. Kameras, LiDAR, Radar, IMUs, GNSS) mit Algorithmen wie Filterung oder Optimierung, um Echtzeit-Kartierung und -Navigation zu ermöglichen.
SLAM ermöglicht autonomen Systemen, ihre Umgebung ohne vorherige Karten oder GPS zu navigieren und zu verstehen.
