Shom 选择 Navsight 解决方案进行水深测量
配备 SBG Navsight 惯性导航系统的快艇和测量船,用于水深测量。
“Apogee 用途广泛;它既适合深水要求,也适合浅水要求。” | Rémi Labonde,Shom 定位和水文设备负责人

Shom,法国国家水文和海洋局
Shom 作为一个公共机构,有 3 个主要目标:国家水文和制图、水文海洋领域的国防支持,以及为海上和海岸公共政策提供海上地理空间产品和服务的支持。
Shom 使用的船队位于布雷斯特,由 11 艘船组成,包括 7 艘快艇和 3 艘 59 米长的 BH2 调查船。它们在法国、非洲、印度洋和加勒比海的浅水和深水区作业。
Shom 还在新喀里多尼亚使用一支由两艘船组成的船队,一艘快艇和一艘浮标铺设船,部分时间用于水文调查。

使用 SBG 更新惯性导航系统
在更新惯性导航系统 (INS) 船队时,Shom 考察了符合 IHO 水深测量标准的 INS,重点关注对多波束回声测深仪数据补偿影响最大的横摇和升沉。
在他们的官方测试区进行了多次测试后,其中每个元素的位置都经过严格而精确的了解,Shom 选择了 SBG Systems 来更换惯性导航系统。 如果起初,他们为新喀里多尼亚的浅水测量获得了 Navsight Ekinox 等级(0.02° 横摇),那么他们随后决定用 Apogee 等级 INS 解决方案(0.008° 横摇)将船队转移到布雷斯特。
“Apogee 用途广泛; 它既符合深水要求,也符合浅水要求。 拥有用于快艇和 BH2 的同质化传感器船队更容易维护,例如备件数量” Shom 定位和水文设备负责人 Rémi Labonde 解释道。
Navsight Apogee 功能特点
Navsight Apogee 等级专为水文测量员设计,由 GNSS 接收器和处理单元组成,可实现惯性和导航数据的实时融合。
Navsight 提供与多个外部设备(如回声探测器、计算机等)的连接。Apogee 传感器的钛金属外壳允许安装在可淹没的发动机舱内,靠近多波束回声探测器。
Navsight Apogee 解决方案是一种基于最先进的 MEMS 技术的高性能、高性价比的惯性导航系统;因此,它不需要年度维护。
我们的解决方案包括免费的无限固件更新和技术支持。Shom 的专业人员补充说:“我们选择 SBG 是因为其良好的性能/价格比和高水平的服务。SBG 技术支持团队随时待命,反应迅速且尽职尽责。”
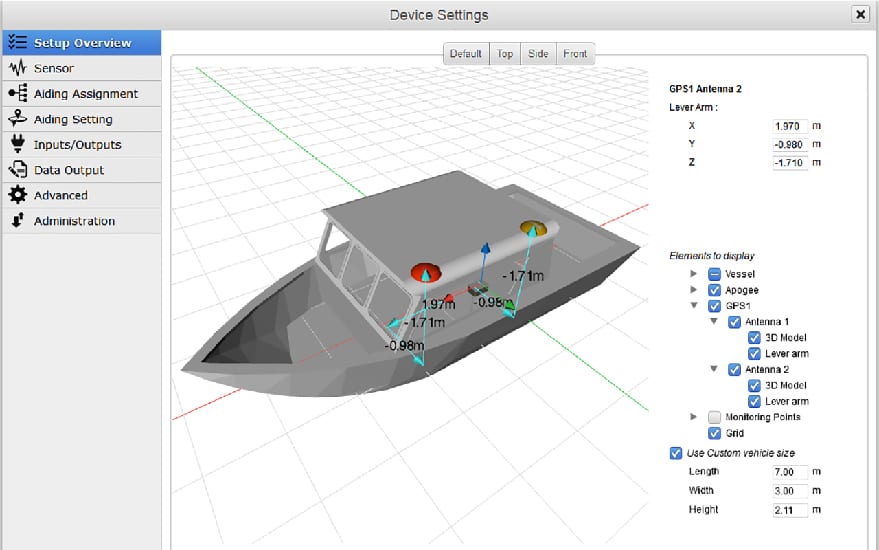
选择 INS 解决方案的另一个关键因素是易用性。通过以太网连接后,Navsight 内部 Web 界面会在安装阶段指导用户。
例如,系统会显示船只的 3D 视图,让用户可以实时检查安装情况。
嵌入式滤波器还在此过程中控制和验证杆臂和天线对准,如果 Shom 需要在国外校准新系统,这可能是一个优势。
“我们是 SBG Systems 网络界面的忠实粉丝。它现代、非常清晰且易于使用;它确实改变了我们团队的工作”,Rémi Labonde 总结道。

Navsight Marine
Navsight Marine 集成了最新的 IMU 和 GNSS 技术,为水文测量员提供完整、强大且用户友好的运动和导航解决方案。
Navsight Marine 易于设置且用途广泛,使水文测量员在浅水和深水中的测量任务更加轻松。
IMU 是主要的传感元件,也是最重要的性能驱动因素。

咨询 Navsight Marine 报价
您有疑问吗?
欢迎访问我们的常见问题解答部分!在这里,您可以找到关于我们重点介绍的应用的最常见问题的答案。如果您找不到您要找的内容,请随时直接与我们联系!
什么是波浪测量传感器?
什么是水深测量?
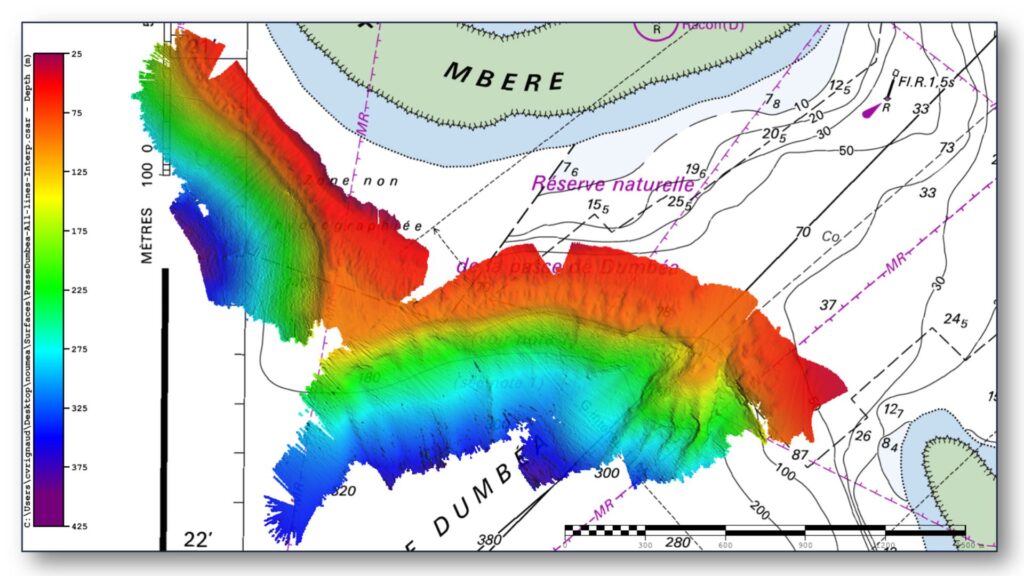
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
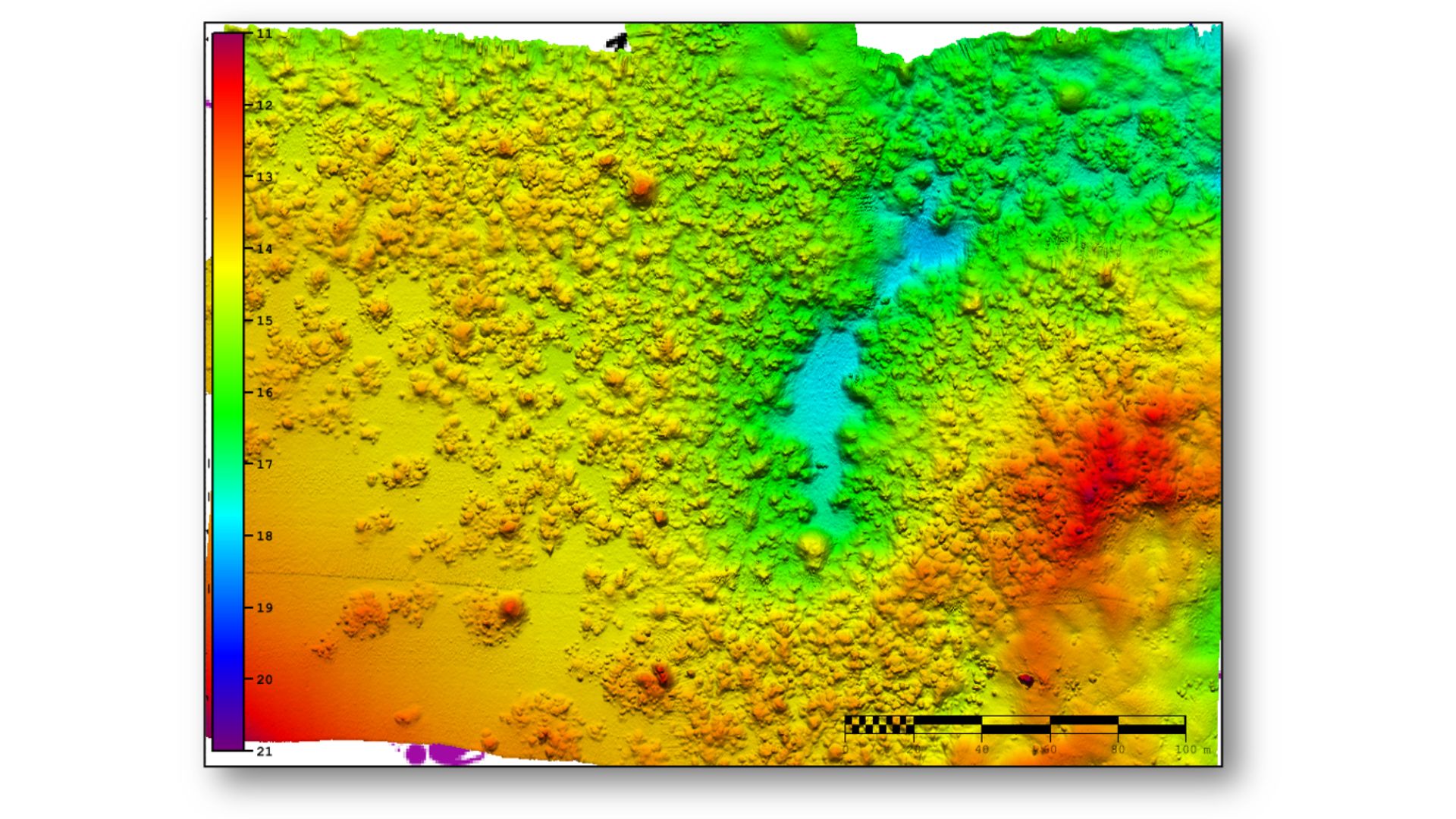
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与创建精确定位的海底 3D 测深表示相关联。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
浮标有什么用途?
浮标是一种漂浮装置,主要用于海事和水基环境中,用于几个关键目的。浮标通常放置在特定位置,以标记水域中的安全通道、航道或危险区域。它们引导船舶,帮助它们避开危险地点,如岩石、浅水区或沉船。
它们被用作船只的锚定点。系泊浮标允许船只系泊,而无需抛锚,这在不适合抛锚或会破坏环境的区域尤其有用。
仪器化浮标 配备了传感器,用于测量温度、波高、风速和大气压力等环境条件。这些浮标为天气预报、气候研究和海洋学研究提供有价值的数据。
一些浮标充当平台,用于收集和传输来自水或海底的实时数据,通常用于科学研究、环境监测和军事应用。
在商业捕鱼中,浮标标记陷阱或渔网的位置。 它们还有助于水产养殖,标记水下养殖场的位置。
浮标还可以标记指定的区域,例如禁止抛锚区、禁止捕鱼区或游泳区,从而帮助执行水上法规。
在所有情况下,浮标对于确保安全、促进海洋活动和支持科学研究都至关重要。
什么是浮力?
浮力是流体(如水或空气)对浸没在其中的物体的重量所施加的力。如果物体的密度小于流体的密度,它允许物体漂浮或上升到表面。浮力产生的原因是作用在物体浸没部分上的压力差异——在较低深度施加的压力较大,从而产生向上的力。
阿基米德原理描述了浮力原理,即物体所受到的向上浮力等于该物体所排开流体的重量。如果浮力大于物体的重量,物体就会漂浮;如果浮力小于物体的重量,物体就会下沉。从船舶工程(设计船舶和潜艇)到浮标等漂浮设备的功能,浮力在许多领域都至关重要。
什么是 IMU?
惯性测量单元 (IMU) 是一种紧凑型传感器模块,通过捕获平台的线性加速度和角旋转速率来测量平台的运动和方向。IMU 的核心是集成了三个加速度计和三个陀螺仪,它们沿正交轴排列,以提供六个自由度的测量。
加速度计感知平台在空间中的加速度,而陀螺仪跟踪平台的旋转方式。通过一起处理这些测量数据,IMU 可以提供关于速度、姿态和航向变化的精确信息,而无需依赖任何外部信号。这使得 IMU 对于在 GPS 不可用、不可靠或被有意拒绝的环境中进行导航至关重要。它们的性能在很大程度上取决于传感器质量、校准以及对误差(如偏差、噪声、比例因子和未对准)的控制程度。
高级 IMU 包括先进的校准、温度补偿、振动过滤和偏置稳定性机制,以确保误差不会随着时间的推移而快速累积。 由于这些特性,IMU 被广泛应用于各种应用中——从无人机、巡飞弹药和自动驾驶车辆到 AUV、机器人和 工业稳定系统——即使在最恶劣的运行条件下,也能提供强大、持续的运动和方向感知。
