Shomが水深測量にNavsightソリューションを選択
SBG Navsight慣性航法システムを搭載したスピードボートと測量船による水深測量。
“Apogeeは汎用性が高く、深水と浅水両方の要件に適合します。” | Shomのポジショニングおよび水路測量機器担当、レミ・ラボンド

Shomは、フランスの国立水路海洋局です。
Shomは公的機関として、国家水路測量および地図作成、水路海洋分野における防衛支援、海洋および沿岸に関する公共政策のための海洋地理空間製品およびサービスのサポートという3つの主要な目的を持っています。
Shomが使用する船隊はブレストに拠点を置いており、7隻の高速艇と3隻の全長59メートルのBH2 サーベイ船を含む11隻のボートで構成されています。フランス、アフリカ、インド洋、カリブ海の浅瀬および深海で運用されています。
Shomはまた、ニューカレドニアに拠点を置く、2隻のボート(1隻の高速艇と、水路サーベイに一部使用されるブイ敷設船)で構成される船隊も使用しています。

SBGの慣性航法システム・ラインナップを刷新
Shomは慣性航法システム(INS)の艦隊を更新するにあたり、水深測量に関するIHO規格に準拠したINSに着目し、マルチビーム音響測深機のデータ補正に最も影響を与えるロールとHeaveに重点を置きました。
各要素の位置が厳密かつ正確にわかっている公式テストゾーンでいくつかのテストを実施した後、Shomは慣性航法システムの交換にSBG Systemsを選択しました。当初、ニューカレドニアの浅瀬測量用にNavsight Ekinoxグレード(0.02°ロール)を取得しましたが、その後、ブレストの艦隊をApogeeグレードのINSソリューション(0.008°ロール)に移行することを決定しました。
“Apogeeは非常に用途が広く、深水と浅瀬の両方の要件に適合します。スピードボートとBH2のセンサーの艦隊を均質化することで、たとえば、予備機器の数など、保守が容易になります”と、Shomのポジショニングおよび水路測量機器担当のRémi Labondeは説明します。
Navsight Apogeeの特長
水路測量家向けに設計されたNavsight Apogeeグレードは、GNSS受信機と、慣性データと航法データをリアルタイムで融合できる処理ユニットで構成されています。
Navsightは、音響測深機やコンピューターなど、いくつかの外部機器への接続を提供します。Apogeeセンサーのチタン製エンクロージャーにより、マルチビーム音響測深機の近くの浸水可能なエンジンコンパートメントに設置できます。
Navsight Apogeeソリューションは、最先端のMEMS技術に基づく高性能で費用対効果の高い慣性航法システムです。したがって、年間のメンテナンスは不要です。
当社のソリューションには、無制限の無料ファームウェアアップデートとテクニカルサポートが含まれています。「SBGを選んだのは、優れた性能/価格比と高水準のサービスのためです。SBGのテクニカルサポートチームは、対応が早く、献身的です」とShomの担当者は付け加えています。
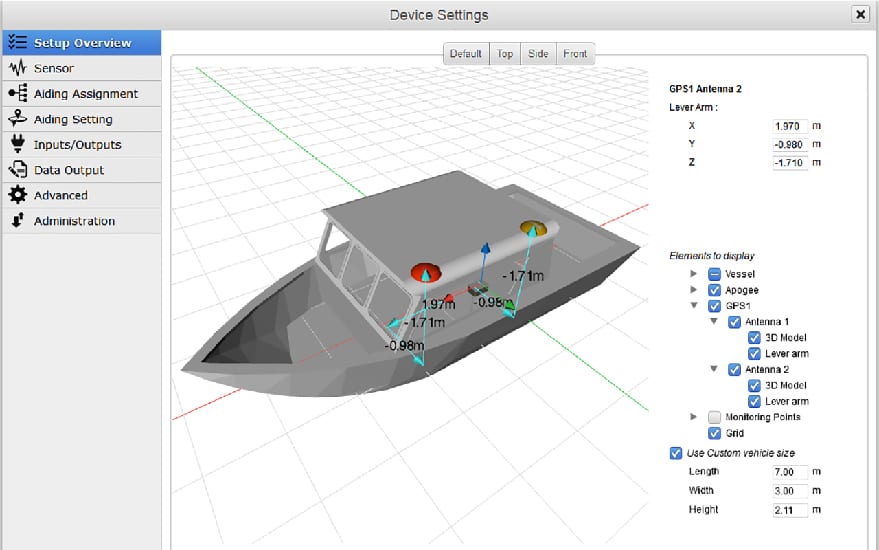
INS ソリューションを選択する際のもう 1 つの重要な要素は、使いやすさでした。イーサネット経由で接続すると、Navsight の内部 Web インターフェイスがインストールフェーズ中にユーザーをガイドします。
たとえば、システムはボートの 3D ビューを表示し、ユーザーはリアルタイムでインストールを確認できます。
組み込みフィルターは、この手順中にレバーアームとアンテナの調整も制御および検証します。これは、Shomが海外で新しいシステムを校正する必要がある場合に役立ちます。
SBGのWebインターフェースは非常に気に入っています。モダンで非常に明確、かつ使いやすく、チームの作業に大きな違いをもたらしますと、Rémi Labondeは締めくくります。

Navsight Marine
Navsight Marineは、最新のIMUおよびGNSSテクノロジーを統合して、水路測量家向けの完全で強力、かつユーザーフレンドリーなモーションおよびナビゲーションソリューションを提供します。
セットアップが簡単で、汎用性が高く、Navsight Marineは、浅瀬と深海の両方で水路測量家の測量タスクを容易にします。
IMUは主要なセンシング要素であり、最も重要なパフォーマンスを左右する要素です。

Navsight Marineの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も頻繁な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
波浪計測センサーとは?
水深測量とは?
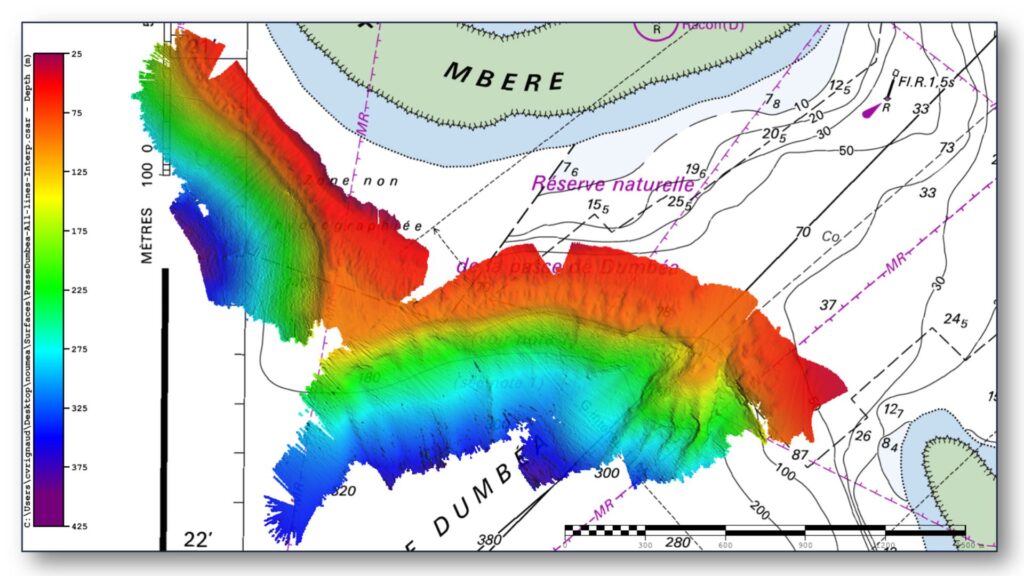
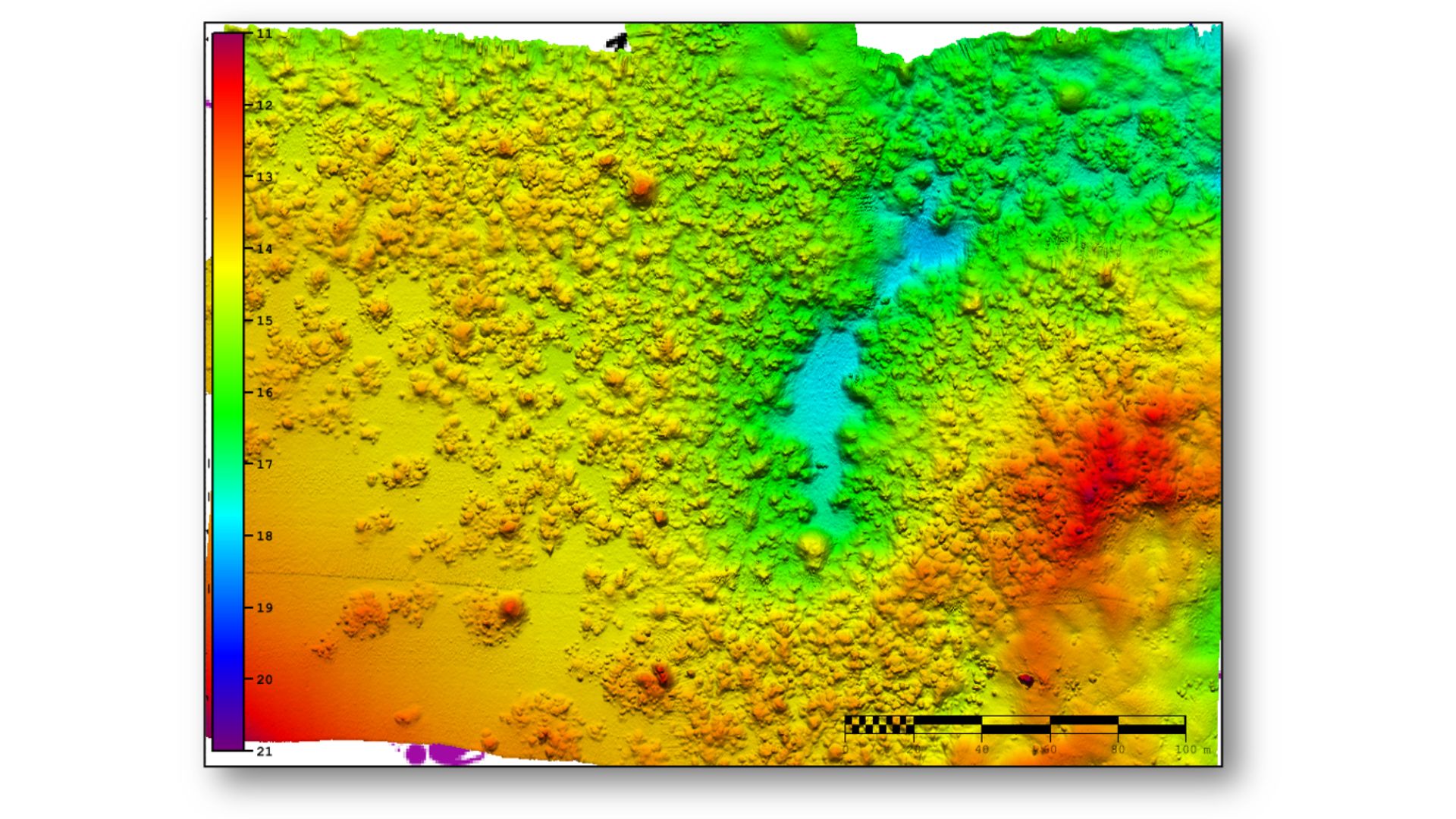
水深測量とは、水中の地形の深度と形状の調査および測定であり、主に海底およびその他の水没した地形のマッピングに焦点を当てています。これは地形の水中版であり、海洋、海、湖、川の水中の特徴に関する詳細な洞察を提供します。水深測量は、航行、海洋建設、資源探査、環境研究など、さまざまなアプリケーションで重要な役割を果たします。
最新の深浅測量技術は、シングルビームやマルチビーム音響測深機などのソナーシステムを利用しており、音波を使用して水深を測定します。これらの装置は、海底に向けて音のPulseを発信し、エコーが戻ってくるまでの時間を記録し、水中での音速に基づいて深度を計算します。特にマルチビーム音響測深機は、一度に広い範囲の海底をマッピングできるため、非常に詳細で正確な海底の表現が可能です。多くの場合、正確な位置情報を持つ3D海底地形図を作成するために、RTK + INSソリューションが使用されます。
水深データは、水没した岩、難破船、砂州などの潜在的な水中の危険を特定することにより、船舶の安全な航行を支援する航海図を作成するために不可欠です。また、科学研究においても重要な役割を果たし、研究者が水中の地質学的特徴、海流、海洋生態系を理解するのに役立ちます。
ブイは何に使用されますか?
ブイは、主に海洋および水上環境で使用される浮遊装置であり、いくつかの重要な目的で使用されます。ブイは多くの場合、安全な航路、水路、または水域の危険区域を示すために特定の場所に設置されます。船舶を誘導し、岩、浅瀬、難破船などの危険な場所を回避するのに役立ちます。
これらは、船舶の固定点として使用されます。係留ブイを使用すると、ボートはアンカーを下ろすことなく係留できます。これは、アンカーを下ろすことが非現実的であるか、環境に悪影響を与える可能性がある地域で特に役立ちます。
計測ブイには、温度、波高、風速、気圧などの環境条件を測定するためのセンサーが装備されています。これらのブイは、天気予報、気候研究、海洋研究に役立つデータを提供します。
一部のブイは、水面や海底からリアルタイムのデータを収集・送信するプラットフォームとして機能し、科学研究、環境モニタリング、軍事用途でよく使用されます。
商業漁業では、ブイはトラップや網の位置を示すために使用されます。また、水産養殖にも役立ち、水中の養殖場の位置を示します。
ブイはまた、投錨禁止区域、禁漁区域、遊泳区域など、指定された区域を示すことができ、水上での規制の実施に役立ちます。
いずれの場合も、ブイは安全性の確保、海洋活動の促進、科学研究のサポートに不可欠です。
浮力とは?
浮力とは、水や空気などの流体が、水中に沈んだ物体の重量に対抗して及ぼす力のことです。物体の密度が流体の密度よりも低い場合、物体は浮いたり、水面に浮上したりすることができます。浮力は、物体の水没部分に及ぼされる圧力の差によって生じます。水深が深くなるほど大きな圧力がかかり、上向きの力が生まれます。
浮力の原理は、アルキメデスの原理によって説明されます。アルキメデスの原理とは、物体に作用する上向きの浮力は、その物体によって排除された流体の重量に等しいというものです。浮力が物体の重量よりも大きい場合、物体は浮き、小さい場合は沈みます。浮力は、海洋工学(船舶や潜水艦の設計)からブイのような浮遊装置の機能まで、多くの分野で不可欠です。
IMUとは?
慣性計測装置(IMU)は、線形加速度と角回転速度を測定することにより、プラットフォームの動きと姿勢を測定する小型センサーモジュールです。IMUの中核は、直交軸に沿って配置された3つの加速度計と3つのジャイロスコープを統合し、6自由度の測定を提供します。
加速度計は、プラットフォームが空間内でどのように加速しているかを検出し、ジャイロスコープは、プラットフォームがどのように回転しているかを追跡します。これらの測定値をまとめて処理することにより、IMUは、外部信号に依存せずに、速度、姿勢、および方位の変化に関する正確な情報を提供します。これにより、GPSが利用できない、信頼できない、または意図的に拒否されている環境でのナビゲーションにIMUが不可欠になります。その性能は、センサーの品質、キャリブレーション、およびバイアス、ノイズ、スケールファクター、ミスアライメントなどの誤差がどれだけ適切に制御されるかに大きく依存します。
高性能IMUは、高度なキャリブレーション、温度補償、振動フィルタリング、およびバイアス安定性メカニズムを備えており、時間の経過とともに誤差が急速に蓄積されないようにします。これらの特性により、IMUはUAV、徘徊型兵器、自律走行車からAUV、ロボット工学、産業用安定化システムまで、幅広い用途で使用されており、過酷な動作条件下でも、モーションとオリエンテーションの堅牢で継続的な認識を提供します。
