
直接地理参照では、位置と姿勢の連続性が重要です。わずかなずれでも、残差誤差が発生し、生成される点群製品に不快な影響を与える可能性があるためです。RTS Smootherは、この重要なニーズに対応するのに役立ちます。
カルマンフィルタリングは、位置、速度、姿勢の推定に優れていますが、特に複雑な環境や動的な環境では、わずかな不整合が残る可能性があります。そのため、Qinertia 4.2で利用できる強力な新機能であるRTS Smootherをご紹介します。
RTSスムーサーとは?
RTS(Rauch–Tung–Striebel)スムーザーは、前方カルマンフィルター後の状態推定を改良するために使用される高度な後方平滑化アルゴリズムです。発明者であるH. E. Rauch、F. Tung、およびC. T. Striebelにちなんで名付けられ、将来の観測を取り入れることで状態推定を強化し、不確実性を軽減し、精度を向上させます。
QinertiaのRTSスムーザーは、センサーフュージョンステップ後にINS軌道を改良するために設計された高度な処理オプションです。スムーザーを適用することにより、Qinertiaはすべての急激なトランジションと突然のジャンプを除去し、最終的な軌道出力がより正確であるだけでなく、大幅に滑らかになるようにします。
どのように機能しますか
標準的な順方向および逆方向カルマンフィルタリングフェーズの後に動作します。データセット全体を活用して推定誤差を最小限に抑え、位置、速度、および方向のノイズを低減し、出力軌道の連続性を高めます。
SBG Systemsによって実装されたRTS Smootherは、共分散行列で動作し、各処理パスの最後にエポック間に存在する可能性のある残差ジャンプを除去します。共分散を平滑化することで、最終的な軌道マージも滑らかになり、絶対精度を損なうことなく不整合が軽減されます。このアプローチにより、滑らかな軌道出力が可能になります。
INS処理でRTSスムーサーを使用するタイミング
困難な環境下では、データに信号の中断、マルチパス誤差、または低い衛星可視性(都市部、森林、谷など)が発生する可能性があります。RTSスムーサーを有効にすることで、軌跡のジャンプやジッターを確実に除去し、高品質の出力を保証します。特に以下の用途に役立ちます。
トラブルシューティングやデータ品質の検証を行う際は、潜在的なデータや処理の問題を特定するために、RTSスムーザーを使用せずに初期実行を行うことをお勧めします。データが検証されたら、スムーザーを使用した2回目の実行を使用して、最もクリーンで正確な結果を生成できます。
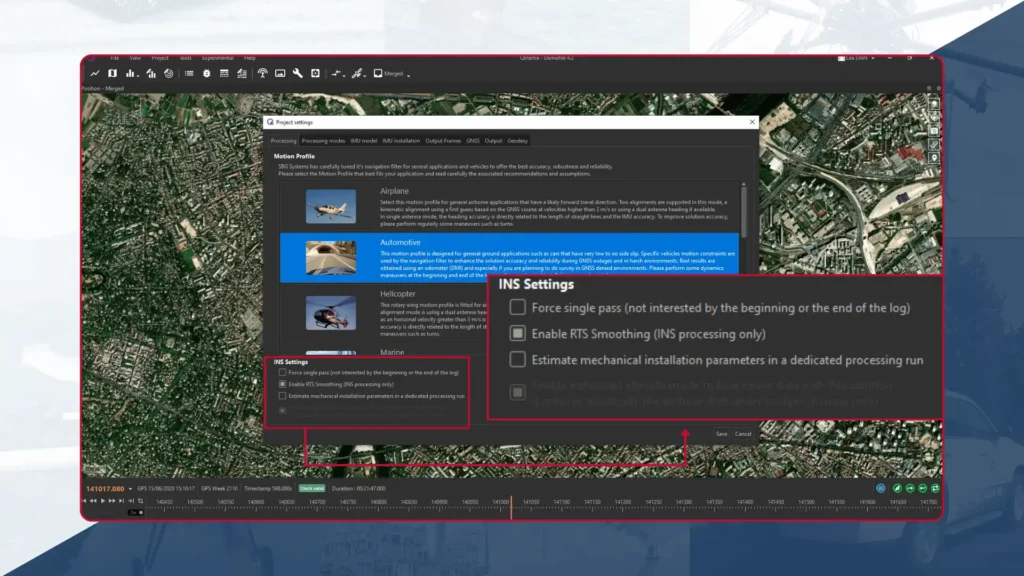
Qinertiaでスムーザーを有効にする方法
レバーアーム推定ツールを自分で試してみませんか?MySBGアカウントの「ダウンロード」セクションから、最新バージョンのQinertiaをダウンロードしてください。インストールしたら、Qinertiaレバーアームツールを起動するときにMySBGアカウントでログインするだけです。
- プロジェクト設定を開きます。
- INS処理のセクションに移動します。
- RTSスムージングを有効化。
- プロジェクト設定を保存して、通常どおり後処理を実行してください。残りの処理はSmootherにお任せください。

RTS Smoother機能の追加により、軌道データの品質と精度をより細かく制御できるようになりました。この新しいツールは、高精度プロジェクトや、よりクリーンでプロフェッショナルな結果を求めるすべての人に、洗練された信頼性の高い結果を提供します。
Qinertiaの詳細については、お問い合わせください。
