
W georeferencji bezpośredniej ciągłość pozycji i orientacji jest kluczowa, ponieważ nawet najmniejszy skok może powodować błędy resztkowe i niepożądane efekty w generowanych produktach chmury punktów. Wygładzanie RTS pomaga zaspokoić tę krytyczną potrzebę.
Chociaż filtr Kalmana świetnie radzi sobie z szacowaniem pozycji, prędkości i orientacji, nadal może pozostawiać drobne niespójności, szczególnie w złożonych lub wysoce dynamicznych środowiskach. Dlatego z radością przedstawiamy wygładzanie RTS, nową, zaawansowaną funkcję dostępną teraz w Qinertia 4.2.
Czym jest wygładzanie RTS?
Wygładzanie RTS (Rauch–Tung–Striebel) to zaawansowany algorytm wygładzania wstecznego, używany do udoskonalania estymacji stanu po kroku filtracji Kalmana. Nazwany na cześć jego twórców H. E. Raucha, F. Tunga i C. T. Striebela, poprawia estymację stanu poprzez włączenie przyszłych obserwacji, zmniejszając niepewność i poprawiając dokładność.
Wygładzanie RTS w Qinertia to zaawansowana opcja przetwarzania, zaprojektowana w celu udoskonalenia trajektorii INS po kroku fuzji czujników. Stosując wygładzanie, Qinertia usuwa wszystkie ostre przejścia i nagłe skoki, zapewniając, że końcowe dane wyjściowe trajektorii są nie tylko dokładniejsze, ale także znacznie płynniejsze.
Jak to działa
Działa po standardowych fazach filtrowania Kalmana w przód i w tył. Wykorzystuje cały zbiór danych, aby zminimalizować błędy estymacji, zredukować szumy w pozycji, prędkości i orientacji oraz poprawić ciągłość trajektorii wyjściowej.
Wygładzanie RTS, zaimplementowane przez SBG Systems, działa na macierzach kowariancji, usuwając resztkowe skoki, które mogą występować między epokami na końcu każdego przebiegu przetwarzania. Wygładzanie kowariancji zapewnia również płynne scalanie trajektorii końcowej, redukując niespójności bez uszczerbku dla dokładności bezwzględnej. Takie podejście pozwala na uzyskanie płynnej trajektorii wyjściowej.
Kiedy używać wygładzania RTS w przetwarzaniu INS?
W trudnych warunkach środowiskowych dane mogą być zakłócone przerwami w sygnale, błędami wielodrożności lub słabą widocznością satelitów (np. obszary miejskie, lasy, doliny). Włączenie RTS Smoother to pewny sposób na usunięcie skoków lub drgań trajektorii, zapewniający wysoką jakość danych wyjściowych. Jest to szczególnie korzystne dla:
- Aplikacji Mobile mapping.
- Nawigacji morskiej.
- Dowolny projekt wymagający niezawodnych, spójnych, post-procesowanych trajektorii INS.
Podczas rozwiązywania problemów lub walidacji jakości danych zaleca się wykonanie wstępnego przebiegu bez RTS Smoother, aby wykryć potencjalne problemy z danymi lub przetwarzaniem. Po zweryfikowaniu danych można użyć drugiego przebiegu z wygładzaniem, aby wygenerować najczystszy i najdokładniejszy wynik.
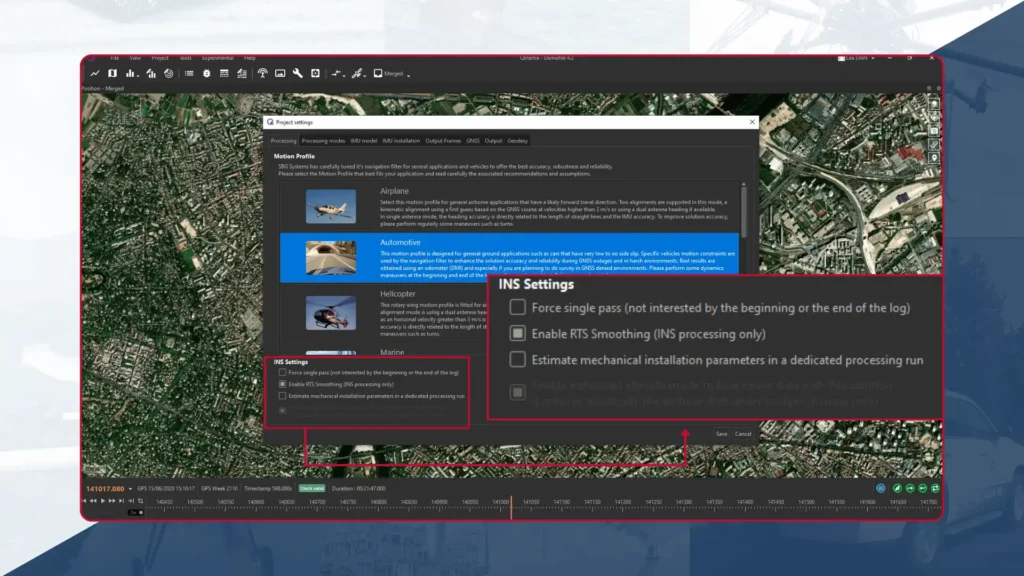
Jak włączyć wygładzanie w Qinertia?
Chcesz wypróbować nasze narzędzie do estymacji ramienia dźwigni? Pobierz najnowszą wersję Qinertia w sekcji “Pobierz” na swoim koncie MySBG. Po zainstalowaniu wystarczy zalogować się na swoje konto MySBG podczas uruchamiania narzędzia Qinertia lever-Arm.
- Otwórz ustawienia projektu.
- Przejdź do sekcji przetwarzania INS.
- Włącz RTS Smoothing.
- Zapisz ustawienia projektu i uruchom post-processing jak zwykle, Smoother zajmie się resztą!

Dzięki dodaniu funkcji RTS Smoother masz teraz większą kontrolę nad jakością i dokładnością danych trajektorii. To nowe narzędzie zapewnia dopracowane, niezawodne wyniki dla projektów o wysokiej precyzji lub dla każdego, kto szuka czystszych, bardziej profesjonalnych rezultatów.
Aby uzyskać więcej informacji o Qinertia, skontaktuj się z nami.
