航空地図データ収集の改善
慣性計測装置(IMU)や慣性航法システムINS)などの慣性システムは、航空マッピング極めて重要なコンポーネントです。
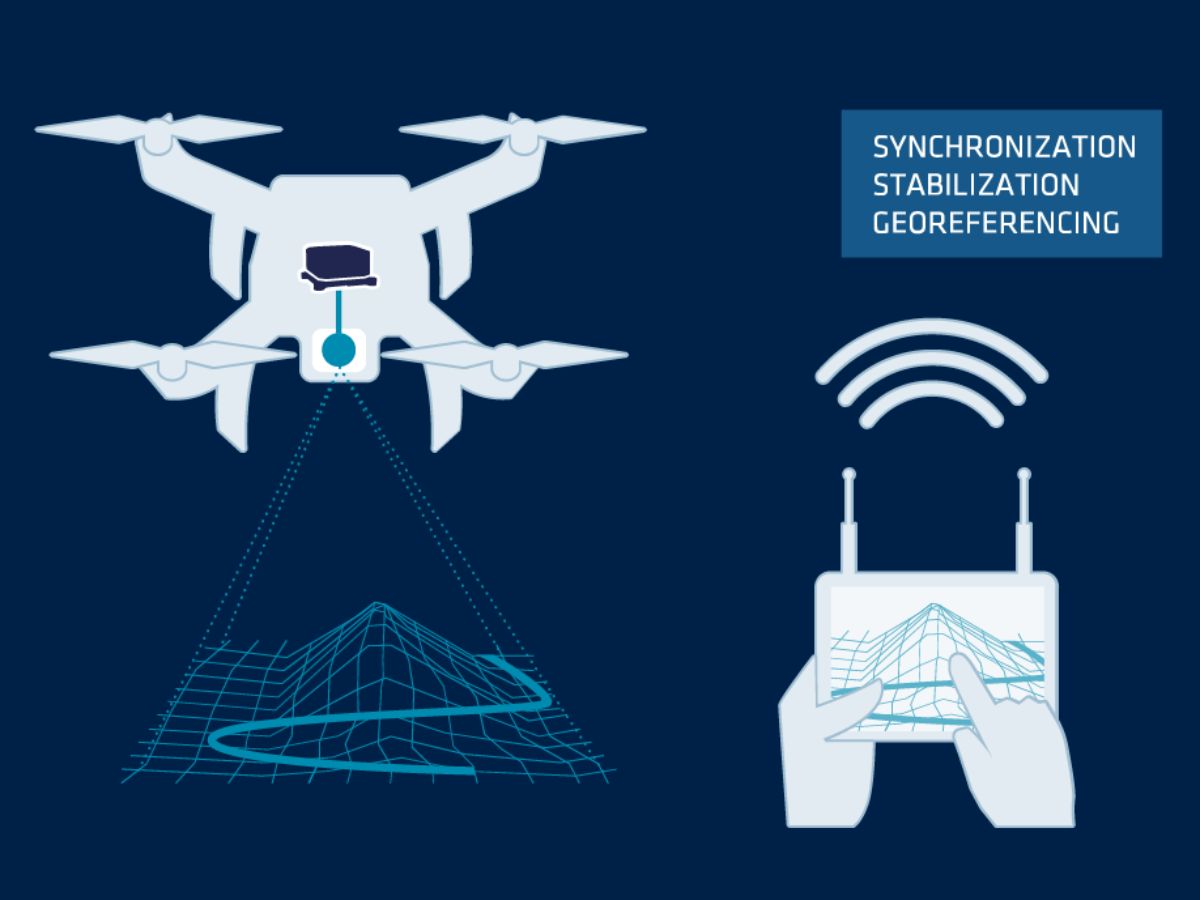
これらのシステムは、航空機の方位、位置、移動に関するリアルタイムのデータを提供し、収集した画像やセンサーデータの正確なジオリファレンス(地理参照)を可能にします。慣性システムはGNSS(全地球航法衛星システム)と連携し、GNS信号が弱い場合や利用できない場合でも、航空機が正確な空間情報を収集し続けることを保証します。
航空マッピング 慣性システムを使用する大きな利点の1つは、収集データの品質に影響を与える可能性のあるピッチ、ロール、ヨーなどの航空機の動きを補正する能力です。航空機の姿勢を継続的に測定することで、慣性システムは画像やセンサーデータの歪みを補正し、結果の一貫性と正確性を保証します。これは、わずかな誤差が最終的なデータセットに大きな誤差をもたらすLiDARのようなアプリケーションでは特に重要です。
さらに、慣性システムは、精度を損なうことなく、より高速なデータ取得を可能にすることで、航空測量の効率を高めます。測量士は、より高い高度とより速い速度で飛行することができ、より短い時間でより多くの場所をカバーすることができます。
ソリューション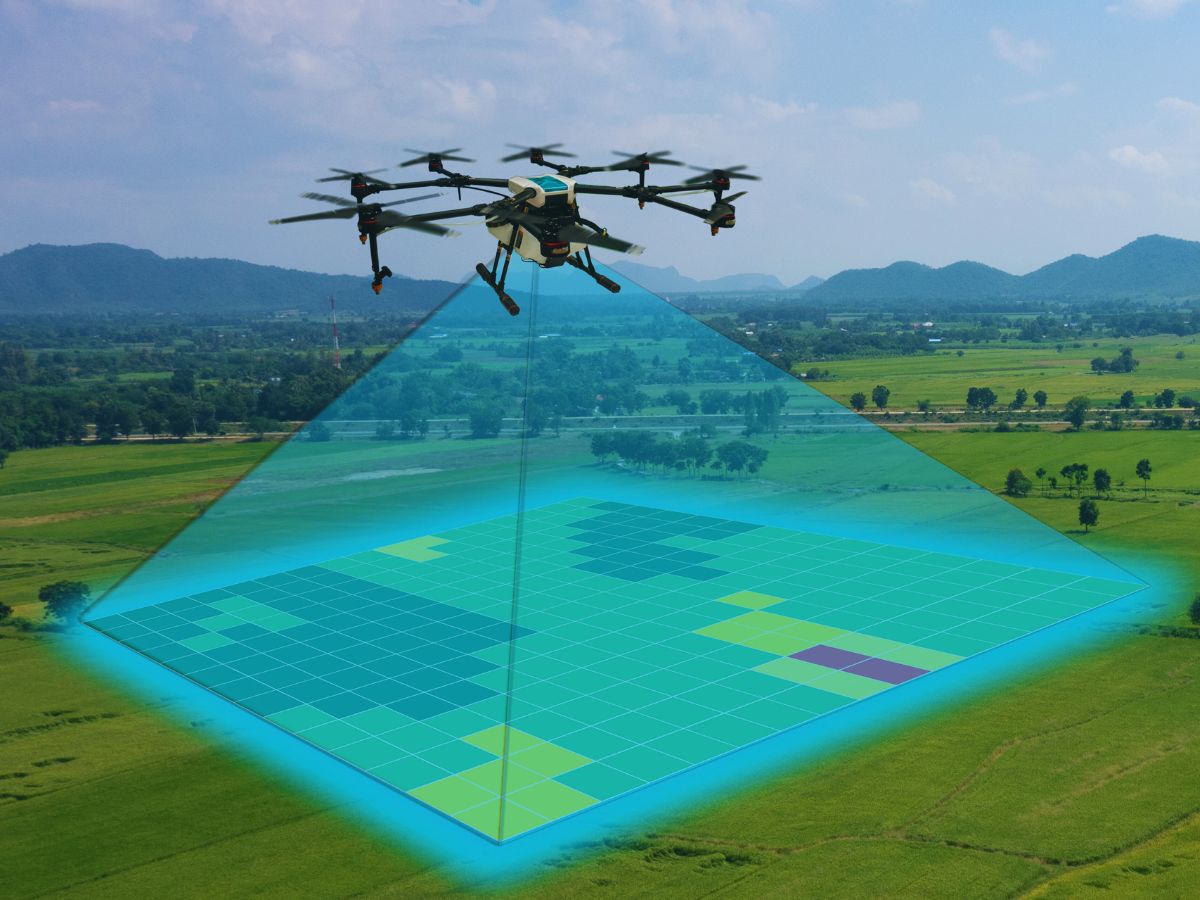
航空マッピングにおける慣性システムの応用
慣性システムは、様々な航空マッピングアプリケーションにおいて重要な役割を果たしている。例えば、コリドーマッピングでは、道路、鉄道、パイプラインなどの細長いエリアをマッピング します。
これにより、エンジニアやプランナーは、インフラ整備やメンテナンスのために正確な計算を行うことができる。
林業や農業では、慣性システムは、ドローンや航空機が広範囲を飛行し、重要なデータを収集するのに役立っている。このデータは、資源管理、作物モニタリング、環境保全をサポートする。森林や畑の正確なマッピングは、土地利用、灌漑、収穫に関する意思決定を改善する。
建設や都市計画では、慣性システムによる航空測量によって、詳細な地形図や地形の3Dモデルが提供される。これらのデータセットは、土地の特徴や潜在的な課題を明確に理解することができるため、大規模プロジェクトの設計や実施に不可欠です。さらに、慣性システムはリアルタイムのデータ処理を可能にし、プロジェクトのタイムラインを短縮し、意思決定を強化します。
リアルタイム・マッピング ナビゲーション
マッピング、INS GNSSを組み合わせることで、リアルタイムの測位とナビゲーションのための堅牢なソリューションを提供します。これらのシステムは、環境条件に関係なく、継続的に高精度のデータを提供するために連携して動作します。密林やcloud 覆われた場所など、GNSSが利用できない環境でも、慣性システムは正確な測位を維持します。
INS テクノロジーは、加速度計とジャイロスコープを使用して航空機の位置を決定しますサーベイ これらのセンサーは加速度と回転運動を追跡します。GNSSデータと組み合わせることで、航空機の飛行経路と位置を完全に把握することができます。この正確な測位により、収集されたすべてのデータが正確に地理参照されます。
リアルタイムの測位は、災害地帯(山火事など)や活発な建設現場など、状況が急速に変化するダイナミックな環境では極めて重要です。飛行経路やデータ収集設定をその場で調整することができます。この柔軟性により、調査員は最も関連性の高い情報を取得することができます。その結果、サーベイ データの全体的な品質と有用性が向上します。

空中サーベイソリューションをご覧ください
私たちのモーション&ナビゲーション製品は、マッピング ニーズに合わせて作られています。GNSSを搭載した当社の高性能INS ソリューションは、リアルタイムの測位、ナビゲーション、オリエンテーションを提供します。航空測量において優れた精度と信頼性をお約束します。
Quanta Extra

キナーシャINS-INS
アプリケーション・パンフレット
パンフレットを受信箱に直接お届けします!
ケーススタディ
当社の製品が、どのように世界中のマッピング 組み込まれ、成功を収めているかをご覧ください。
当社のケーススタディでは、SBG Systems慣性システムが航空マッピングプロジェクトにおいて精度、信頼性、効率をどのように向上させているかを紹介しています。
大規模なインフラ調査から環境モニタリングまで、当社の慣性システムは幅広い用途でその価値を証明してきました。



私たちのことを話す
当社のテクノロジーを採用したイノベーターやクライアントから直接話を聞くことができます。
彼らの証言とサクセスストーリーは、私たちのセンサーが実用的なUAVナビゲーション・アプリケーションに大きな影響を与えていることを物語っています。
他のマッピング 見る
幅広い用途にマッピング する当社の高度な慣性航法ソリューションの可能性をご覧ください。当社のテクノロジーは、陸、空、海のオペレーションをサポートします。どのような環境においても、信頼性の高いデータ、高精度、一貫したパフォーマンスをお約束します。
ご質問はありますか?
FAQセクションへようこそ!ここでは、私たちが紹介しているアプリケーションに関する最も一般的な質問に対する答えを見つけることができます。お探しのものが見つからない場合は、お気軽に直接お問い合わせください!
慣性システムとLIDARを組み合わせてドローン・マッピングを行うには?
SBG Systems慣性システムとドローンマッピング用LiDARを組み合わせることで、正確な地理空間データを取得する精度と信頼性が向上する。
この統合がどのように機能し、ドローンを使ったマッピングにどのようなメリットをもたらすかを紹介しよう:
- レーザーパルスを使って地表までの距離を測定し、地形や構造物の詳細な3D地図を作成するリモートセンシング手法。
- SBG Systems INS 、慣性計測ユニットIMU)とGNSSデータを組み合わせ、GNSSが使えない環境でも正確な位置、姿勢(ピッチ、ロール、ヨー)、速度を提供します。
SBGの慣性システムはLiDARデータと同期している。INS ドローンの位置と姿勢を正確に追跡し、LiDARは下方の地形や物体の詳細を捉える。
ドローンの正確な向きを知ることで、LiDARデータを3D空間に正確に配置することができる。
GNSSコンポーネントは全地球測位を提供し、IMU リアルタイムの方位と移動データを提供する。この組み合わせにより、GNSS信号が弱い場合や利用できない場合(高い建物や密林の近くなど)でも、INS ドローンの経路と位置を追跡し続け、一貫したLiDARマッピングを可能にする。
航空マッピングジオリファレンスとは何ですか?
ジオリファレンスとは、地理データ(地図、衛星画像、航空写真など)を既知の座標系に合わせ、地球の表面上に正確に配置できるようにするプロセスである。
これにより、データを他の空間情報と統合することができ、正確な位置ベースの分析とマッピングが可能になる。
ジオリファレンスは、LiDARやカメラ、ドローンに搭載されたセンサーなどのツールで収集されたデータを、現実世界の座標に正確にマッピングするために不可欠である。
各データポイントに緯度、経度、標高を割り当てることで、ジオリファレンスは、取得したデータが地球上の正確な位置と方位を反映することを保証します。これは、地理空間マッピング、環境モニタリング、建設計画などのアプリケーションにとって非常に重要です。
ジオリファレンスには通常、座標が既知のコントロールポイント(多くの場合、GNSSまたは地上でのマッピング得られる)を使用して、キャプチャされたデータを座標系に合わせることが含まれる。
このプロセスは、正確で信頼性が高く、使い勝手の良い空間データセットを作成するために不可欠である。
写真測量とは?
写真測量とは、写真を使って物体や環境の距離、寸法、特徴を測定し、地図化する科学と技術である。異なる角度から撮影された重なり合う画像を分析することで、写真測量は正確な3Dモデル、地図、または測定値の作成を可能にする。このプロセスは、複数の写真に共通する点を特定し、三角測量の原理を用いて空間上の位置を計算することで機能する。
写真測量は次のような様々な分野で広く使われている:
- 写真測量による地形マッピング:風景や都市部の3D地図を作成する。
- 建築とエンジニアリング:建築資料作成、構造解析
- 考古学における写真測量:遺跡や遺物の記録と復元。
- 航空写真測量マッピング:土地の測量と建設計画
- 林業と農業:農作物、森林、土地利用の変化をモニタリングする。
写真測量が最新のドローンやUAV(無人航空機)と組み合わされることで、航空画像の迅速な収集が可能になり、大規模なマッピング、建設、環境モニタリングプロジェクトにおいて効率的なツールとなる。