SLAM-basiertes Mobile Mapping
Das vMS3D ist ein mobiles Kartierungssystem, das das Beste aus Trägheits-, GNSS- und SLAM-Technologien kombiniert.
„Ellipse INS liefert sehr, sehr präzise Geschwindigkeitsdaten.“ | Herr Ninot, Gründer von VIAMETRIS

VIAMETRIS ist ein Vorreiter in der Entwicklung von SLAM-basierten Lösungen. Vor zwei Jahren brachte das Unternehmen das iMS3D auf den Markt, ein Indoor-Mapping-System, das auf der SLAM-Technologie basiert.
Aufbauend auf dieser Erfahrung hat das Unternehmen gerade eine neue Lösung auf den Markt gebracht: das vMS3D, ein Mobile Mapping System, das das Beste aus Trägheits-, GNSS- und SLAM-Technologien kombiniert, um eine innovative Lösung mit einem attraktiven Preis-Leistungs-Verhältnis zu bieten.
Das intelligenteste Mobile Mapping System
vMS3D sieht aus wie ein klassisches Mobile Mapping System (MMS). Es integriert eine 360°-Kamera, einen rotierenden LiDAR und ein internes Navigationssystem mit GNSS-Empfänger.
Der unkomplizierte automatische Workflow zeigt nicht die subtile und dennoch ausgeklügelte interne Berechnung, die ihn einzigartig macht. Tatsächlich ist das vMS3D mit einem zusätzlichen LiDAR ausgestattet, der für die SLAM-Berechnung verwendet wird.
Nach der Erfassung analysiert die Post-Processing-Software - namens PPiMMS - automatisch die Situationen, in denen GNSS ausreichend ist, in denen Trägheit bevorzugt wird oder in denen SLAM erforderlich ist.
Das Beste aus GNSS, Inertial und SLAM
Die vMS3D-Lösung berücksichtigt die Vor- und Nachteile jeder Technologie, abhängig von ihren Einsatzbedingungen:
- GNSS: Wenn der GNSS-Empfänger zuverlässige Daten liefert, beispielsweise in einer Umgebung mit freiem Himmel, basiert die Lösung auf seiner Position. Wenn ein GNSS-Ausfall oder eine Störung auftritt, wählt das System zwischen inertialen oder SLAM-basierten Daten.
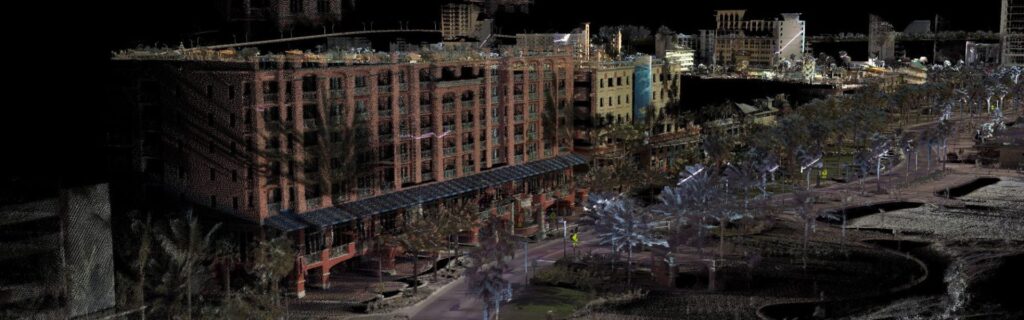
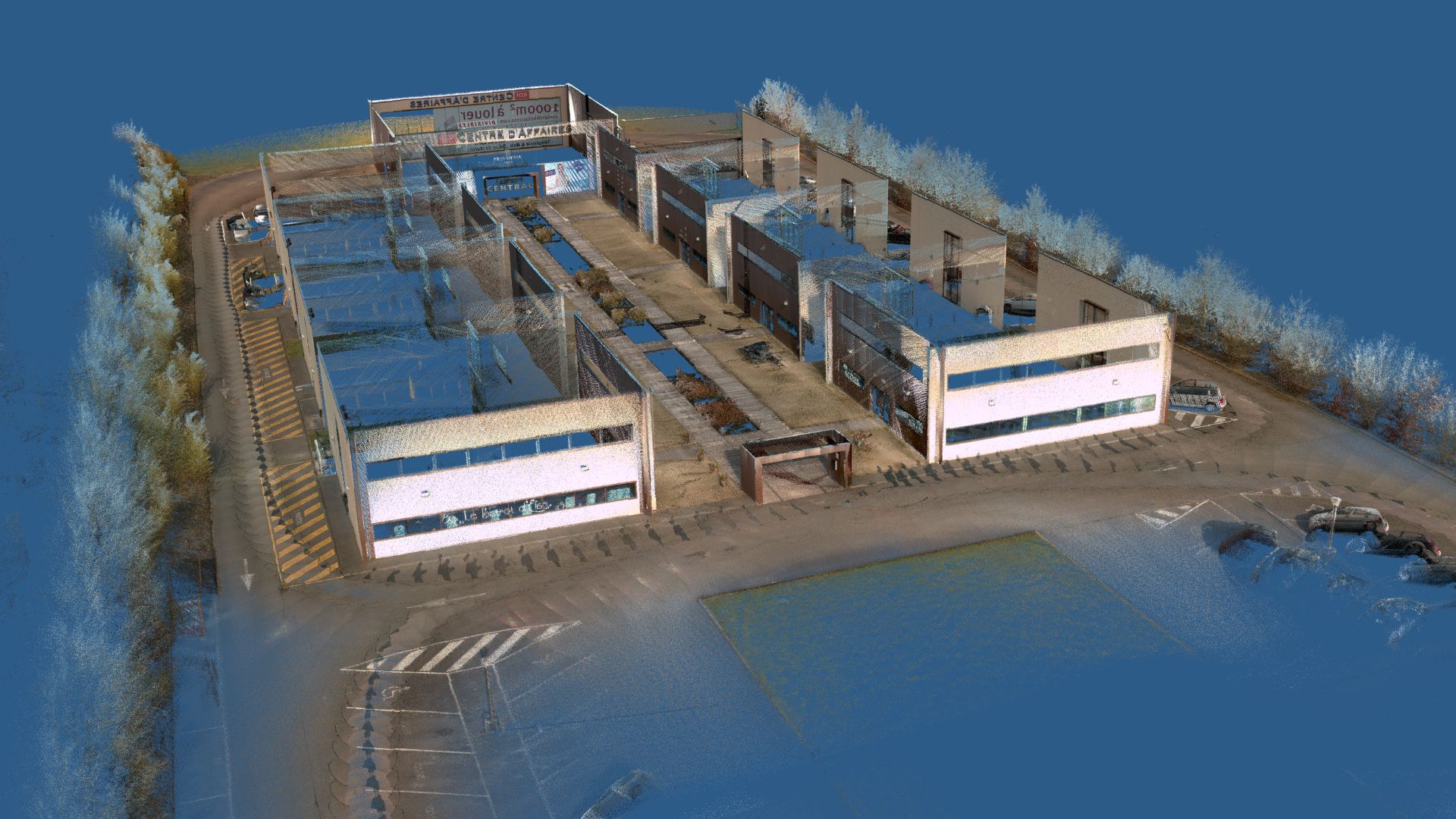
- SLAM: Die von SLAM berechnete Position wird in dichten Umgebungen bevorzugt, in denen die umgebenden Objekte sehr vielfältig und nah sind, wie z. B. in städtischen Schluchten oder Wäldern. Die SLAM-Fähigkeiten sind in Umgebungen begrenzt, in denen Objekte zu weit entfernt oder nicht unterscheidbar sind.
- Inertial: Geschwindigkeits- und Orientierungsinformationen, die vom Inertial Navigation System (INS) bereitgestellt werden, können die Navigation in allen Fällen unterstützen, in denen GNSS und SLAM eingeschränkt sind. Das Inertial Navigation System liefert Roll und Nick, um alle LiDAR-Daten einzuschränken, sodass die Punktwolke auf Bodenebene referenziert wird. Drehgeschwindigkeiten sind ebenfalls sehr hilfreich, insbesondere wenn eine abrupte Richtungsänderung auftritt. Tatsächlich ist eine Orientierungskompensation zwischen zwei Scans erforderlich, wenn sich der LiDAR in Bewegung befindet.
Ellipse-D, die intelligente Wahl von VIAMETRIS
Bereits sehr zufrieden mit der Ellipse für sein Indoor-iMS3D sehr zufrieden, suchte Jérôme Ninot, Gründer von VIAMETRIS, nicht lange nach einem INS sein neues innovatives Projekt.
Ellipse INS sehr, sehr präzise Geschwindigkeitsdaten“, erklärt Herr Ninot.
Dank der innovativen SLAM-Berechnung kann VIAMETRIS auf kleine und kostengünstige Trägheitssensoren zurückgreifen, während andere Systeme auf dem Markt Trägheitssysteme mit höherer Genauigkeit erfordern. Ellipse liefern eine Genauigkeit von 0,1°.
Herr Ninot wählte auch das Ellipse-D Modell aufgrund des All-in-One- und Miniatur-Formfaktors sowie des eingebetteten RTK-GNSS-Empfängers.
„Mit einem integrierten INS wie dem Ellipse-D, das eine einzige Kommunikationsschnittstelle und eine integrierte Synchronisation mit dem GNSS und LiDAR bietet, konnten wir uns auf unsere SLAM-Expertise konzentrieren“, fügt der CEO hinzu, bevor er erwähnt, dass weniger Kabel immer eine gute Wahl ist.
Ellipse-D, ein Partner für viele Aufgaben
Die Ellipse-D ist in diese innovative Lösung integriert und erfüllt mehrere Aufgaben. Erstens liefert sie Roll- und Nickwinkel, um alle LiDAR-Daten einzuschränken, sodass die Punktwolke auf Bodenniveau referenziert wird.
Zweitens sind die Ellipse-D-Drehgeschwindigkeiten sehr hilfreich, insbesondere wenn eine abrupte Richtungsänderung auftritt. Tatsächlich ist ein Orientierungsausgleich zwischen zwei Scans erforderlich, wenn der LiDAR in Bewegung ist.
Schließlich führt die Ellipse-D in Echtzeit eine Fusion von inertialen und GNSS-Informationen durch, um exzellente Geschwindigkeitsmessungen zu liefern, die ebenfalls sehr wichtig sind, um die internen Algorithmen von vMS3D kontinuierlich zu unterstützen.

Ellipse-D
Die Ellipse-D ist ein inertiales Navigationssystem, das eine Dual-Antenne und ein Dual-Frequenz RTK GNSS integriert und mit unserer Post-Processing-Software Qinertia kompatibel ist.
Entwickelt für Roboter- und Geodatenanwendungen, kann es den Odometer-Eingang mit Pulse oder CAN OBDII für eine verbesserte Koppelnavigation-Genauigkeit verschmelzen.

Fordern Sie ein Angebot für Ellipse-D an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Wie kann ich Inertialsysteme mit einem LIDAR für die Drohnenkartierung kombinieren?
Die Kombination von Trägheitssystemen von SBG Systems mit LiDAR für die Drohnenkartierung verbessert die Genauigkeit und Zuverlässigkeit bei der Erfassung präziser Geodaten.
So funktioniert die Integration und so profitiert die drohnenbasierte Kartierung davon:
- Eine Fernerkundungsmethode, die Laserimpulse verwendet, um Entfernungen zur Erdoberfläche zu messen und eine detaillierte 3D-Karte des Geländes oder der Bauwerke zu erstellen.
- SBG Systems INS kombiniert eine Inertial Measurement Unit (IMU) mit GNSS-Daten, um eine genaue Positionierung, Orientierung (Nick, Roll, Gier) und Geschwindigkeit auch in GNSS-abgelehnten Umgebungen zu ermöglichen.
Das Trägheitssystem von SBG ist mit den LiDAR-Daten synchronisiert. Das INS verfolgt präzise die Position und Orientierung der Drohne, während der LiDAR die Gelände- oder Objektdetails darunter erfasst.
Durch die Kenntnis der genauen Ausrichtung der Drohne können die LiDAR-Daten präzise im 3D-Raum positioniert werden.
Die GNSS-Komponente bietet globale Positionierung, während die IMU Echtzeit-Orientierungs- und Bewegungsdaten liefert. Die Kombination stellt sicher, dass das INS auch dann die Flugbahn und Position der Drohne verfolgen kann, wenn das GNSS-Signal schwach oder nicht verfügbar ist (z. B. in der Nähe von hohen Gebäuden oder dichten Wäldern), was eine konsistente LiDAR-Kartierung ermöglicht.
Was ist Multibeam-Echolotung?
Multibeam Echo Sounding (MBES) ist eine fortschrittliche hydrographische Vermessungstechnik, die zur hochpräzisen Kartierung des Meeresbodens und der Unterwasserstrukturen eingesetzt wird.
Im Gegensatz zu herkömmlichen Einzelstrahl-Echoloten, die die Tiefe an einem einzelnen Punkt direkt unter dem Schiff messen, verwendet MBES eine Reihe von Sonarstrahlen, um gleichzeitig Tiefenmessungen über eine breite Fläche des Meeresbodens zu erfassen. Dies ermöglicht eine detaillierte, hochauflösende Kartierung des Unterwassergeländes, einschließlich Topographie, geologischer Merkmale und potenzieller Gefahren.
MBES-Systeme senden Schallwellen aus, die sich durch das Wasser bewegen, vom Meeresboden abprallen und zum Schiff zurückkehren. Durch die Analyse der Zeit, die die Echos für die Rückkehr benötigen, berechnet das System die Tiefe an mehreren Punkten und erstellt so eine umfassende Karte der Unterwasserlandschaft.
Diese Technologie ist essenziell für verschiedene Anwendungen, einschließlich Navigation, Schiffsbau, Umweltüberwachung und Ressourcenerkundung, und liefert kritische Daten für sichere maritime Operationen und ein nachhaltiges Management der Meeresressourcen.
Was ist der Unterschied zwischen RTK und PPK?
Real-Time Kinematic (RTK) ist eine Positionierungstechnik, bei der GNSS-Korrekturen nahezu in Echtzeit übertragen werden, typischerweise unter Verwendung eines RTCM-Format-Korrekturdatenstroms. Es kann jedoch Herausforderungen bei der Sicherstellung der GNSS-Korrekturen geben, insbesondere hinsichtlich ihrer Vollständigkeit, Verfügbarkeit, Abdeckung und Kompatibilität.
Der Hauptvorteil von PPK gegenüber RTK-Nachverarbeitung besteht darin, dass die Datenverarbeitungsaktivitäten während der Nachverarbeitung optimiert werden können, einschließlich Vorwärts- und Rückwärtsverarbeitung. Bei der Echtzeitverarbeitung führen Unterbrechungen oder Inkompatibilitäten bei den Korrekturen und ihrer Übertragung zu einer geringeren Positionsgenauigkeit.
Ein erster wichtiger Vorteil der GNSS-Nachverarbeitung (PPK) gegenüber der Echtzeitverarbeitung (RTK) besteht darin, dass das im Feld verwendete System keine Datenverbindung/Funkverbindung benötigt, um die RTCM-Korrekturen von der CORS in das INS/GNSS-System einzuspeisen.
Die Haupteinschränkung bei der Einführung der Nachbearbeitung ist die Anforderung, dass die endgültige Anwendung auf die Umgebung reagiert. Wenn Ihre Anwendung jedoch die zusätzliche Verarbeitungszeit verkraften kann, die erforderlich ist, um eine optimierte Trajektorie zu erstellen, wird dies die Datenqualität für alle Ihre Ergebnisse erheblich verbessern.
