
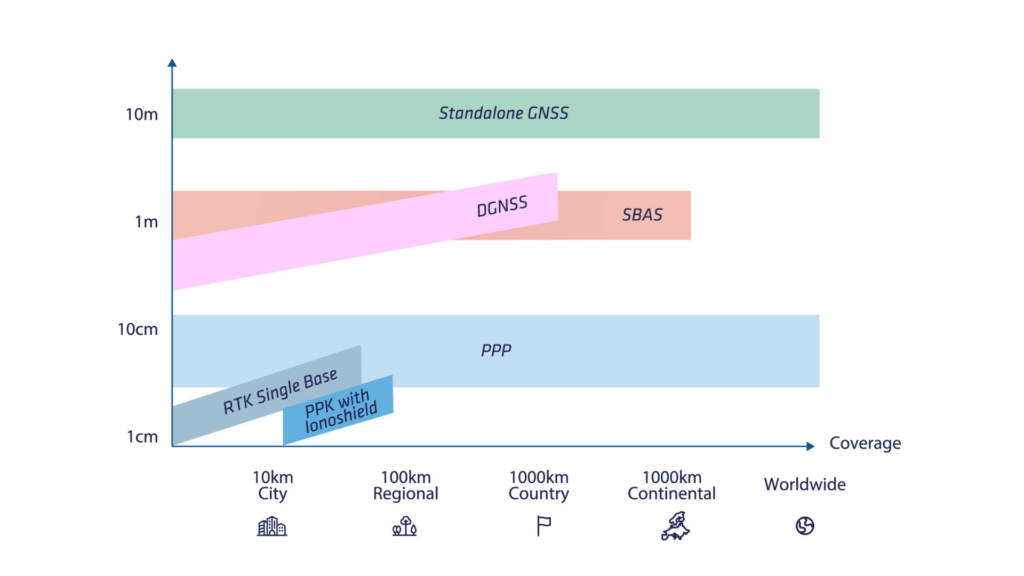
In uno scenario quotidiano, l'accuratezza di un Global Navigation Satellite System (GNSS) standalone è più che sufficiente per aiutare qualcuno a orientarsi, ma molte applicazioni richiedono una maggiore accuratezza. Molte tecnologie di correzione differenziale sono state sviluppate per migliorare l'accuratezza del GNSS entro 1 cm, consentendo una vasta gamma di nuove applicazioni.
Il raggiungimento di tale accuratezza richiede attenzione al sistema di riferimento utilizzato per i calcoli e i risultati di posizionamento, un argomento trattato in Geodesia e trasformazioni di datum, che è al di fuori dello scopo di questo articolo.
Correzioni GNSS
Migliorare l'accuratezza del GNSS si basa sulla correzione di vari errori.
Esistono molti tipi di correzioni che forniscono diversi livelli di copertura e prestazioni.
I principali sono dettagliati nella tabella sottostante. In questo articolo, tratteremo le basi delle correzioni più comuni: una breve spiegazione del DGNSS, seguita da spiegazioni approfondite di SBAS e RTK; e descriveremo i vantaggi del PPK.
Il prossimo articolo di questa serie esaminerà più da vicino Ionoshield e PPP in maggior dettaglio.
GNSS differenziale (DGNSS)
Il DGNSS tradizionale basato su codice fa una semplice supposizione: gli errori satellitari e gli errori atmosferici locali si presumono essere gli stessi in piccole aree. Una coppia di ricevitori GPS può quindi essere utilizzata per annullare sia gli errori atmosferici (ionosferici e troposferici) che quelli satellitari, migliorando così le prestazioni di navigazione.
In questa modalità di funzionamento, una stazione base con ricevitore GNSS è installata entro pochi chilometri dal raggio operativo del ricevitore GNSS del rover. La stazione base trasmette una serie di correzioni al ricevitore del rover utilizzando un modem RF o GSM. Il ricevitore del rover può quindi utilizzare queste correzioni per calcolare una posizione differenziale (rispetto alla stazione base).
Questa tecnica può migliorare l'accuratezza della navigazione a livello sub-metrico, ma è ormai obsoleta poiché RTK è diventato lo standard per il posizionamento ad alta accuratezza.
SBAS (Satellite Based Augmentation System)
SBAS è stato sviluppato per consentire la navigazione sicura degli aerei civili. Da allora è stato utilizzato per molte altre applicazioni per l'utente finale che richiedono una maggiore accuratezza rispetto a un ricevitore GNSS standalone.
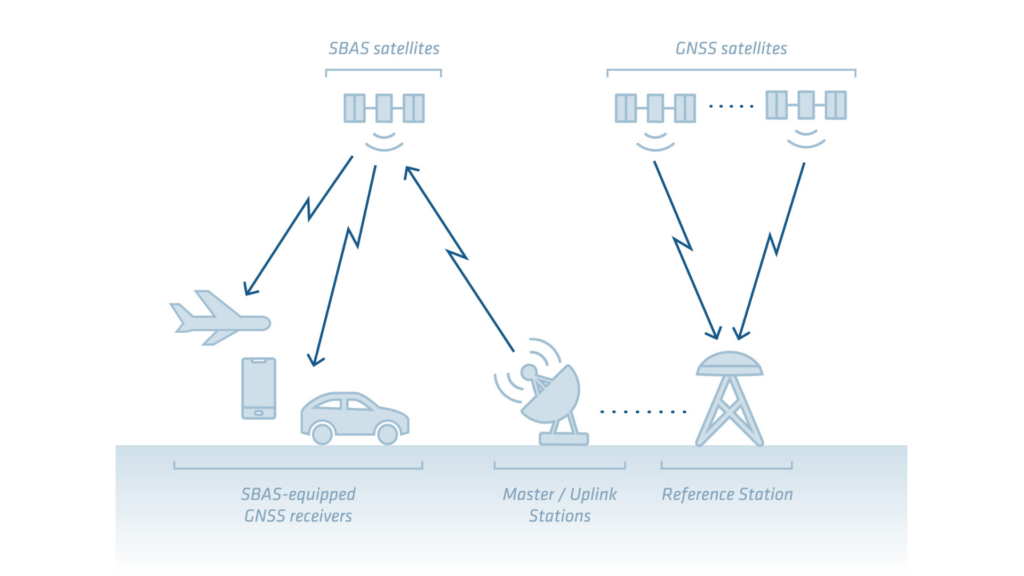
Il concetto di SBAS è quello di utilizzare una rete di stazioni di riferimento per calcolare le correzioni che possono migliorare le prestazioni del GPS su un'ampia area (copertura continentale).
Queste correzioni vengono quindi trasmesse da satelliti geostazionari SBAS dedicati. I moderni ricevitori GNSS possono tracciare queste correzioni direttamente attraverso la loro normale antenna GNSS e utilizzarle nel loro motore di posizionamento, come SBAS che offre un'accuratezza di 1 metro.
L'obiettivo principale di tutte le costellazioni SBAS non è quello di raggiungere la massima accuratezza, ma di consentire al GNSS di raggiungere un'accuratezza minima per l'applicazione prevista (navigazione e atterraggio di aeromobili) con un concetto aggiunto di integrità (misurazione accurata dell'errore di posizione).
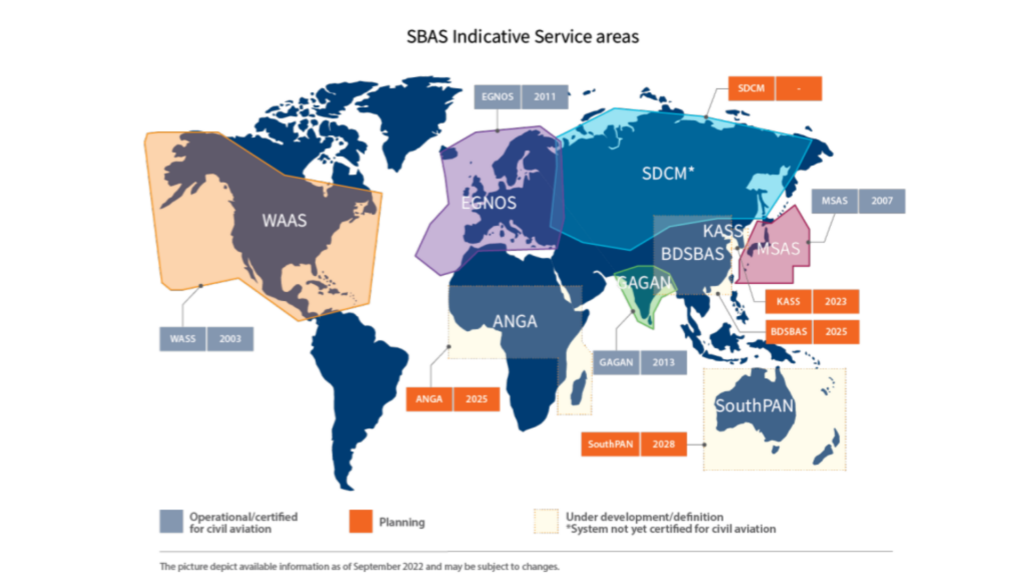
I sistemi SBAS attualmente in uso includono:
- WAAS per i paesi del Nord America
- EGNOS per l'Europa
- GAGAN per l'India
- MSAS per il Giappone
Tuttavia, la maggior parte degli attuali SBAS fornisce correzioni solo per la costellazione GPS, rendendoli non ottimali per la navigazione terrestre. Le future soluzioni SBAS (ad esempio EGNOS V2) forniranno correzioni multi-costellazione.
Tecnologia alla base di SBAS
Le varie soluzioni SBAS utilizzano la stessa tecnologia di base per fornire correzioni. Forniscono correzioni per:
- Errori dell'orologio del satellite
- Deviazioni dell'orbita del satellite
- Errori atmosferici
SBAS fornisce anche informazioni sull'integrità dei satelliti che possono essere utilizzate per rifiutare i dati provenienti da satelliti malfunzionanti.
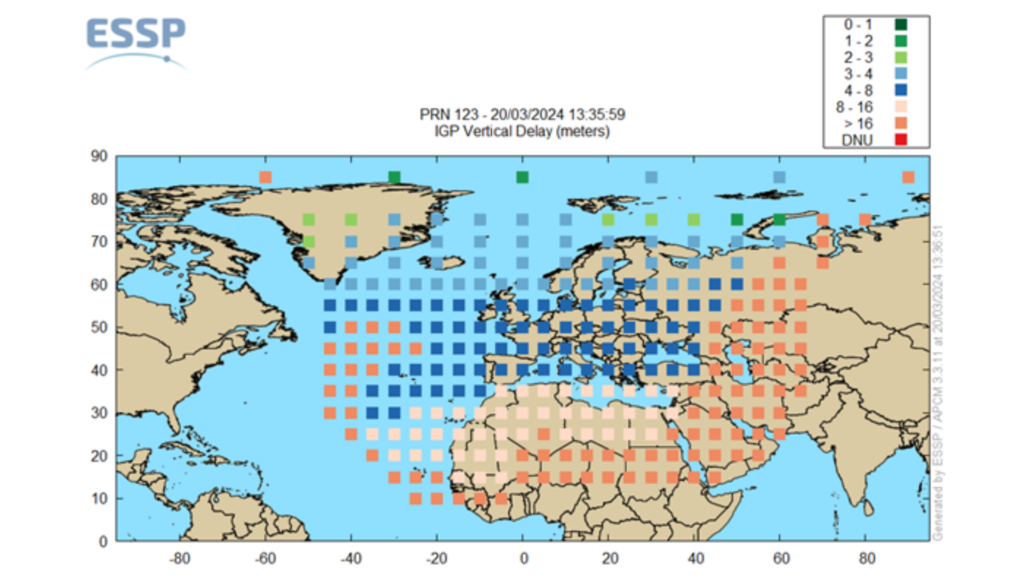
Le correzioni atmosferiche vengono calcolate utilizzando la rete di stazioni base per fornire un modello degli errori atmosferici. Il valore di errore trasferito corrisponde al ritardo verticale introdotto dall'atmosfera in punti specifici chiamati IGP (Ionospheric Grid Points). Il ricevitore può quindi correggere il ritardo per i diversi segnali provenienti da ciascun satellite.
Utilizzando le informazioni fornite da SBAS, il ricevitore può correggere gli errori nella misurazione basata sulla pseudorange, migliorando l'accuratezza della posizione a circa 1,2 m RMS orizzontale e 1,6 m RMS verticale. Questo è un miglioramento significativo rispetto al GNSS standalone, specialmente per la componente verticale.
Real Time Kinematic (RTK) e Post-Processed Kinematic (PPK)
La tecnologia RTK è stata introdotta per la prima volta nel settore della topografia a metà degli anni '90. Come il tradizionale Sistema di Posizionamento Globale Differenziale (DGPS), l'RTK si basa su una stazione base posizionata con precisione e su GNSS mobili.
Due fasi di calcolo fondamentali consentono un posizionamento con precisione centimetrica:
- Doppia differenza
- Misurazione della fase portante e correzione dell'ambiguità
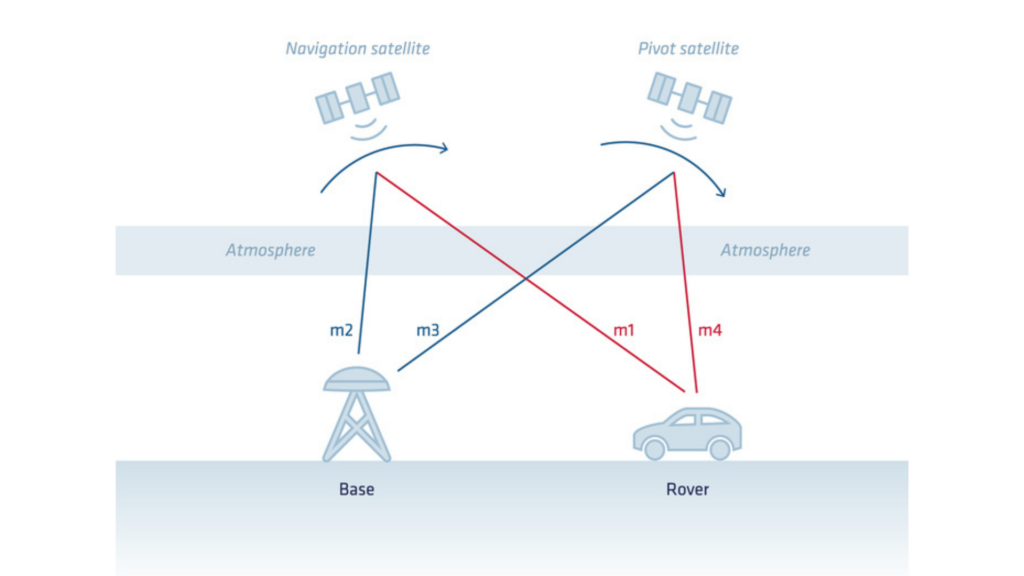
Doppia differenza
Il DGPS generalmente utilizza solo misurazioni di codice e a singola differenza.
D'altra parte, l'RTK aggiunge misurazioni di fase e utilizza un approccio a “doppia differenza”. In questo metodo, le misurazioni della base vengono sottratte dalle misurazioni del rover e tutte le misurazioni del satellite di navigazione vengono sottratte da un satellite pivot.
Questo approccio può compensare tutti gli errori indotti dal satellite, gli errori indotti dal ricevitore, nonché gli errori atmosferici che si presume siano costanti in prossimità della stazione base.
Da questo calcolo otteniamo:
- La posizione del rover (latitudine/longitudine/altitudine) nel datum della stazione base
- L'ora del rover
La distanza tra la stazione base e il rover è chiamata baseline ed è un fattore chiave in RTK. All'aumentare della baseline, il budget di errore aumenta marginalmente perché gli errori atmosferici comuni e gli errori comuni dell'orbita del satellite non vengono completamente annullati. Questo è il tipico “+1ppm” che si riscontra nelle specifiche di accuratezza della posizione RTK.
Misurazione della fase portante e correzione dell'ambiguità
La misurazione della fase portante, introdotta nel nostro precedente articolo, è necessaria per ridurre gli errori al livello del centimetro.
La sfida con le misurazioni della fase portante è che sono intrinsecamente ambigue (o incomplete). Manca un numero intero di cicli di fase portante dalla misurazione. Questa parte mancante è anche nota come “ambiguità”.
Il processo di posizionamento Real-Time Kinematic (RTK) inizia stimando queste ambiguità. Questo processo è anche noto come modalità “RTK Float”. In questa modalità, le ambiguità convergono lentamente ma non sono valori interi. Ciò consente al ricevitore di smussare la posizione e ottenere un'accuratezza di circa un decimetro.
Per ottenere la massima accuratezza e robustezza, il passo successivo è identificare il valore intero per ciascuna di queste ambiguità in tempo reale. Questo processo è chiamato risoluzione dell'ambiguità intera.
Il risultato della risoluzione dell'ambiguità massimizza l'accuratezza RTK e fornisce una maggiore robustezza. Questo è comunemente indicato come modalità “RTK Fixed”.
Se il tracciamento della fase verso un particolare satellite viene interrotto, si verifica un evento di ‘cycle slip’ e l'ambiguità intera per quel satellite deve essere risolta di nuovo. Per questo motivo, troppi cycle slip (e soprattutto cycle slip su tutti i satelliti contemporaneamente) hanno un effetto negativo sulle prestazioni RTK. Una buona antenna e il posizionamento dell'antenna e un ambiente RF pulito sono essenziali per limitare questi eventi.
Cinematica in post-processing
Come abbiamo visto, RTK è l'applicazione di queste correzioni “in tempo reale”, il che significa che il rover deve avere una connessione di collegamento dati alla stazione base per calcolare l'elaborazione RTK sul campo.
Alcune applicazioni non necessitano della traiettoria in tempo reale, ma potrebbero beneficiare di una maggiore accuratezza o di una configurazione più semplice. Il Post Processing Kinematic (PPK) può soddisfare tali esigenze. Con PPK, il rover raccoglie i propri dati GNSS grezzi durante la raccolta dei dati senza ricevere correzioni in tempo reale. Successivamente, questi dati vengono post-elaborati utilizzando informazioni precise da una stazione base o da una rete di stazioni di riferimento.
Il PPK offre maggiore flessibilità nella raccolta dei dati perché non si basa su correzioni in tempo reale. Viene spesso utilizzato in scenari in cui la comunicazione in tempo reale è difficile o non necessaria, come la mappatura aerea, il rilevamento con droni o la ricerca scientifica.
Vantaggi dell'utilizzo del PPK per le correzioni differenziali.
PPK offre i seguenti vantaggi chiave durante l'elaborazione GNSS:
- Flusso di lavoro sul campo migliorato: un costo importante di una missione basata su RTK è garantire che una stazione base sia nelle vicinanze, impostare una stazione base se necessario, garantire una connessione dati affidabile, ecc. Qinertia ha un gran numero di reti CORS integrate e accesso diretto a reti di terze parti. Ciò elimina la complessità di garantire la disponibilità di una base e di impostare una connessione dati affidabile.
- Controllo di qualità migliorato: molti indicatori di qualità aiutano a valutare le prestazioni effettive di un'elaborazione. Questi includono statistiche avanzate, separazione (differenza tra la posizione/assetto calcolata durante l'elaborazione in avanti e indietro), nonché indicatori di segnali GNSS.
- Prestazioni complessive migliorate: la risoluzione dell'ambiguità RTK può richiedere del tempo (da pochi secondi a pochi minuti a seconda della distanza dalla stazione base e delle condizioni atmosferiche). Questo può essere significativo all'inizio di un'acquisizione o in condizioni GNSS difficili. PPK mitiga questi effetti elaborando sia in avanti che indietro per massimizzare il tasso di fix. Le prestazioni possono anche essere migliorate utilizzando algoritmi più avanzati o utilizzando effemeridi satellitari accurate.
