Mapeamento Móvel baseado em SLAM
O vMS3D é um sistema de mapeamento móvel que combina o melhor das tecnologias inercial, GNSS e SLAM.
“O Ellipse INS fornece dados de velocidade muito, muito precisos.” | Sr. Ninot, fundador da VIAMETRIS

A VIAMETRIS é precursora no desenvolvimento de soluções baseadas em SLAM. Há dois anos, a empresa lançou o iMS3D, um sistema de mapeamento interno baseado na tecnologia SLAM.
Aproveitando essa experiência, a empresa acaba de lançar uma nova solução: o vMS3D, um sistema de mapeamento móvel que combina o melhor das tecnologias inercial, GNSS e SLAM para oferecer uma solução inovadora com uma relação desempenho/preço atraente.
O Sistema de Mapeamento Móvel Mais Inteligente
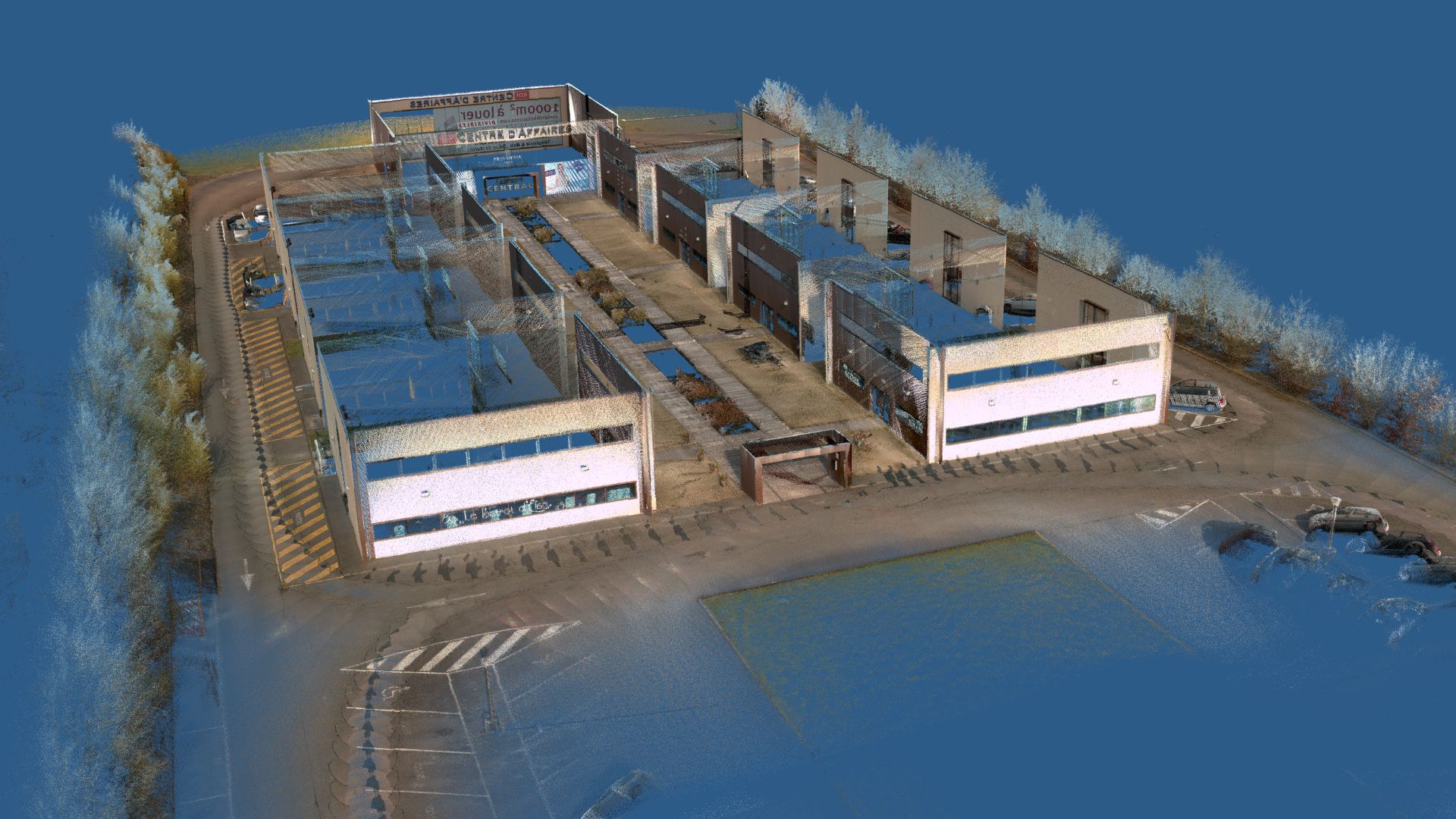
O vMS3D se assemelha a um Sistema de Mapeamento Móvel (MMS) clássico. Ele integra uma câmera de 360°, um LiDAR rotativo e um sistema de navegação interno com receptor GNSS.
O fluxo de trabalho automático e direto não revela a computação interna sutil e sofisticada que o torna único. De fato, o vMS3D é equipado com um LiDAR adicional usado para computação SLAM.
Após a aquisição, o software de pós-processamento - denominado PPiMMS - analisa automaticamente as situações onde o GNSS é suficiente, onde o inercial é preferível ou onde o SLAM é necessário.
O Melhor do GNSS, Inercial e SLAM
A solução vMS3D leva em consideração as vantagens e desvantagens de cada tecnologia, dependendo de suas condições de uso:
- GNSS: Quando o receptor GNSS fornece dados confiáveis, por exemplo, em ambiente de céu aberto, a solução se baseia em sua posição. Se ocorrer uma interrupção ou distúrbio do GNSS, o sistema escolhe entre dados inerciais ou baseados em SLAM
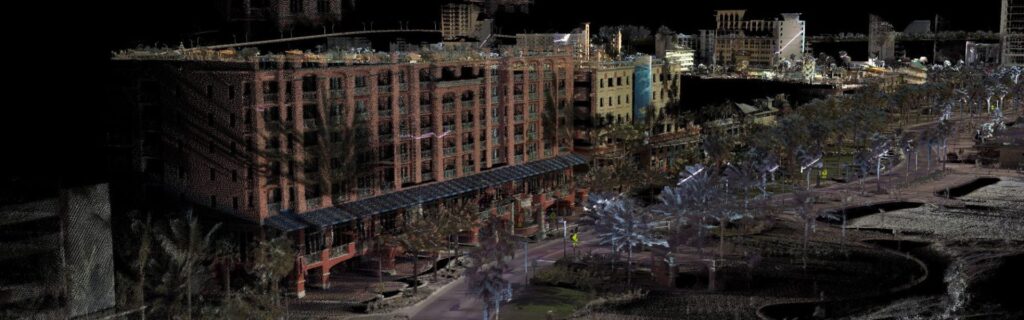
- SLAM: A posição calculada a partir do SLAM é preferível em ambientes densos onde os objetos circundantes são muito diversos e próximos, como em cânions urbanos ou florestas. Os recursos do SLAM são limitados em ambientes onde os objetos estão muito distantes ou não são distinguíveis.
- Inercial: As informações de velocidades e orientação fornecidas pelo Sistema de Navegação Inercial (INS) são capazes de auxiliar na navegação em todos os casos em que GNSS e SLAM são limitados. O Sistema de Navegação Inercial fornece roll e pitch para restringir todos os dados do LiDAR, de modo que a nuvem de pontos seja referenciada no nível do solo. As taxas de giro também são muito úteis, especialmente quando ocorre uma mudança abrupta de direção. De fato, a compensação de orientação é necessária entre duas varreduras quando o LiDAR está em movimento.
Ellipse-D, a escolha inteligente da VIAMETRIS
Já estou muito satisfeito com o Ellipse para seu iMS3D interno, Jérôme Ninot, fundador da VIAMETRIS, não precisou procurar muito para selecionar um INS seu novo projeto inovador.
Ellipse INS dados de velocidade muito, muito precisos”, afirma o Sr. Ninot.
O inovador cálculo SLAM permite que a VIAMETRIS confie em sensores inerciais miniaturizados e econômicos, enquanto outros sistemas no mercado exigem sistemas inerciais de maior precisão. Ellipse oferecem uma precisão de 0,1°.
O Sr. Ninot também escolheu o modelo Ellipse-D pelo formato multifuncional e em miniatura, e pelo receptor RTK GNSS integrado.
“Com um INS integrado como o Ellipse-D, oferecendo uma única interface de comunicação e sincronização integrada com o GNSS e o LiDAR, conseguimos nos concentrar em nossa experiência em SLAM” acrescenta o CEO, antes de mencionar que menos cabos são sempre uma boa escolha.
Ellipse-D, um parceiro para muitas tarefas
Integrado a esta solução inovadora, o Ellipse-D executa diversas tarefas. Primeiramente, ele fornece roll e pitch para restringir todos os dados do LiDAR, de modo que a nuvem de pontos seja referenciada ao nível do solo.
Em segundo lugar, as taxas de rotação do Ellipse-D são muito úteis, especialmente quando ocorre uma mudança abrupta de direção. De fato, a compensação de orientação é necessária entre duas varreduras quando o LiDAR está em movimento.
Finalmente, o Ellipse-D funde em tempo real informações inerciais e GNSS para fornecer excelentes medições de velocidade, que também são muito importantes para auxiliar continuamente os algoritmos internos do vMS3D.

Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Como posso combinar sistemas inerciais com um LIDAR para mapeamento com drones?
A combinação dos sistemas inerciais da SBG Systems com LiDAR para mapeamento com drones aumenta a precisão e a confiabilidade na captura de dados geoespaciais precisos.
Veja como a integração funciona e como ela beneficia o mapeamento baseado em drones:
- Um método de sensoriamento remoto que usa pulsos de laser para medir distâncias até a superfície da Terra, criando um mapa 3D detalhado do terreno ou das estruturas.
- O INS SBG Systems combina uma Unidade de Medição Inercial (IMU) com dados GNSS para fornecer posicionamento, orientação (pitch, roll, yaw) e velocidade precisos, mesmo em ambientes com restrição de GNSS.
O sistema inercial da SBG é sincronizado com os dados do LiDAR. O INS rastreia com precisão a posição e a orientação do drone, enquanto o LiDAR captura os detalhes do terreno ou do objeto abaixo.
Ao conhecer a orientação precisa do drone, os dados do LiDAR podem ser posicionados com precisão no espaço 3D.
O componente GNSS fornece posicionamento global, enquanto a IMU oferece dados de orientação e movimento em tempo real. A combinação garante que, mesmo quando o sinal GNSS é fraco ou indisponível (por exemplo, perto de edifícios altos ou florestas densas), o INS pode continuar a rastrear o caminho e a posição do drone, permitindo um mapeamento LiDAR consistente.
O que é Ecobatimetria Multifeixe?
A Sondagem Multifeixe (MBES) é uma técnica avançada de levantamento hidrográfico usada para mapear o leito marinho e as feições subaquáticas com alta precisão.
Ao contrário dos ecobatímetros tradicionais de feixe único que medem a profundidade em um único ponto diretamente abaixo da embarcação, o MBES utiliza uma matriz de feixes de sonar para capturar simultaneamente medições de profundidade em uma ampla faixa do leito marinho. Isso permite o mapeamento detalhado e de alta resolução do terreno subaquático, incluindo topografia, feições geológicas e perigos potenciais.
Os sistemas MBES emitem ondas sonoras que viajam através da água, rebatendo no leito marinho e retornando à embarcação. Ao analisar o tempo que os ecos levam para retornar, o sistema calcula a profundidade em vários pontos, criando um mapa abrangente da paisagem subaquática.
Esta tecnologia é essencial para diversas aplicações, incluindo navegação, construção naval, monitoramento ambiental e exploração de recursos, fornecendo dados críticos para operações marítimas seguras e gestão sustentável dos recursos marinhos.
Qual é a diferença entre RTK e PPK?
A Cinemática em Tempo Real (RTK) é uma técnica de posicionamento onde as correções GNSS são transmitidas quase em tempo real, normalmente usando um fluxo de correção de formato RTCM. No entanto, pode haver desafios para garantir as correções GNSS, especificamente sua integridade, disponibilidade, cobertura e compatibilidade.
A maior vantagem do PPK sobre o pós-processamento RTK é que as atividades de processamento de dados podem ser otimizadas durante o pós-processamento, incluindo o processamento para frente e para trás, enquanto no processamento em tempo real, qualquer interrupção ou incompatibilidade nas correções e sua transmissão levará a um posicionamento de menor precisão.
Uma primeira vantagem fundamental do pós-processamento GNSS (PPK) vs. tempo real (RTK) é que o sistema usado em campo não precisa ter um datalink/rádio para alimentar as correções RTCM provenientes do CORS no sistema INS/GNSS.
A principal limitação para a adoção do pós-processamento é a exigência de que a aplicação final atue sobre o ambiente. Por outro lado, se sua aplicação puder suportar o tempo de processamento adicional necessário para produzir uma trajetória otimizada, isso melhorará muito a qualidade dos dados para todas as suas entregas.
