Cartographie mobile basée sur SLAM
Le vMS3D est un système de cartographie mobile combinant le meilleur des technologies inertielles, GNSS et SLAM.
“L'Ellipse INS fournit des données de vitesse très, très précises.” | M. Ninot, Fondateur de VIAMETRIS

VIAMETRIS est un précurseur dans le développement de solutions basées sur SLAM. Il y a deux ans, la société a lancé l'iMS3D, un système de cartographie d'intérieur basé sur la technologie SLAM.
Capitalisant sur cette expérience, la société vient de lancer une nouvelle solution : le vMS3D, un système de cartographie mobile combinant le meilleur des technologies inertielles, GNSS et SLAM pour offrir une solution innovante avec un rapport performance/prix attractif.
Le système de cartographie mobile le plus intelligent
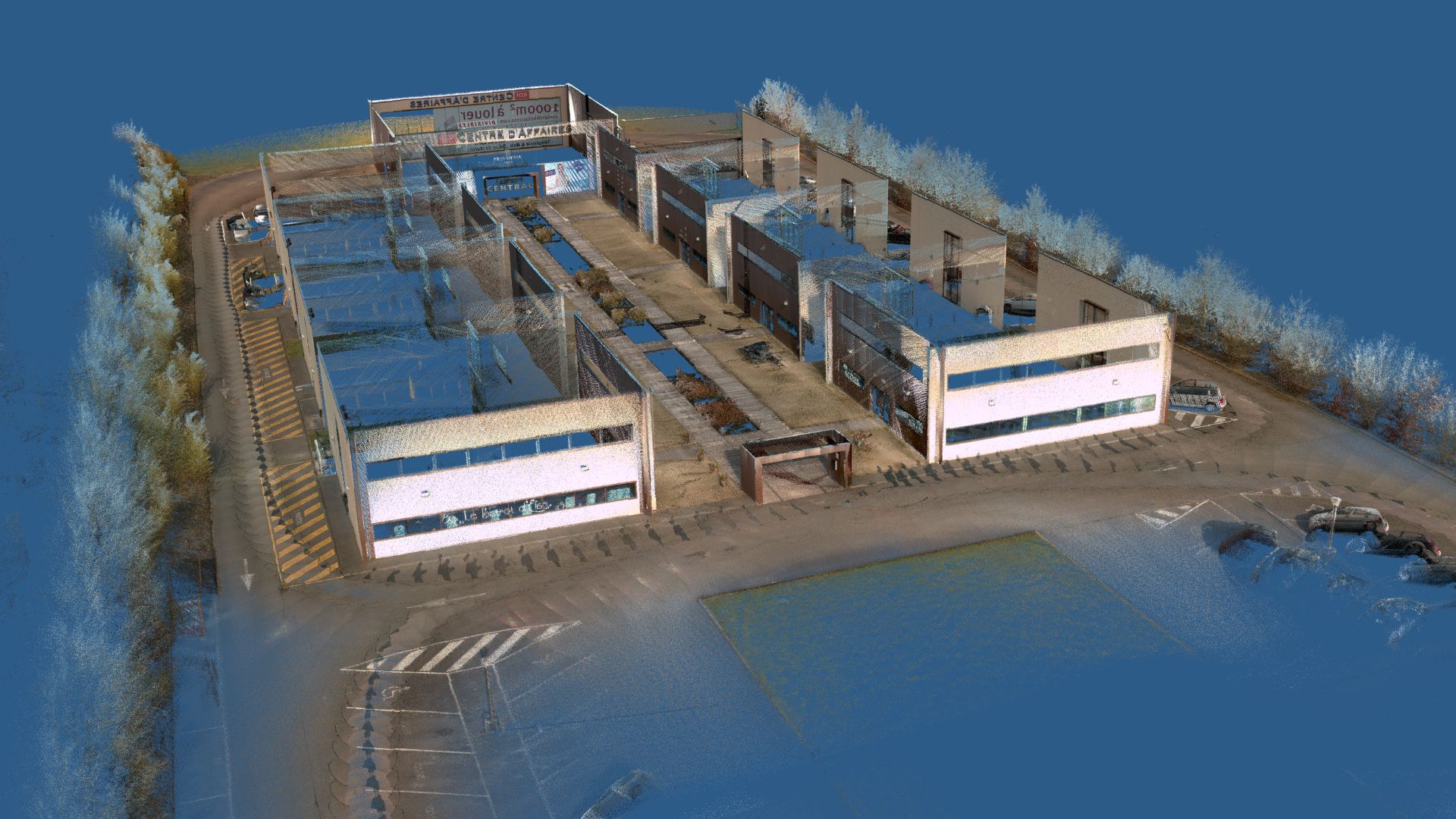
Le vMS3D ressemble à un système de cartographie mobile (MMS) classique. Il intègre une caméra à 360°, un LiDAR rotatif, un système de navigation interne avec récepteur GNSS.
Le flux de travail automatique simple ne montre pas le calcul interne subtil et pourtant sophistiqué qui le rend unique. En effet, le vMS3D est équipé d'un LiDAR supplémentaire utilisé pour le calcul SLAM.
Après l'acquisition, le logiciel de post-traitement - nommé PPiMMS - analyse automatiquement les situations où le GNSS est suffisant, où l'inertiel est préféré ou où le SLAM est requis.
Le meilleur du GNSS, de l'inertiel et du SLAM
La solution vMS3D prend en compte les avantages et les inconvénients de chaque technologie, en fonction de leurs conditions d'utilisation :
- GNSS : Lorsque le récepteur GNSS fournit des données fiables, par exemple dans un environnement à ciel ouvert, la solution repose sur sa position. Si une panne ou une perturbation du GNSS se produit, le système choisit entre les données inertielles ou celles basées sur SLAM.
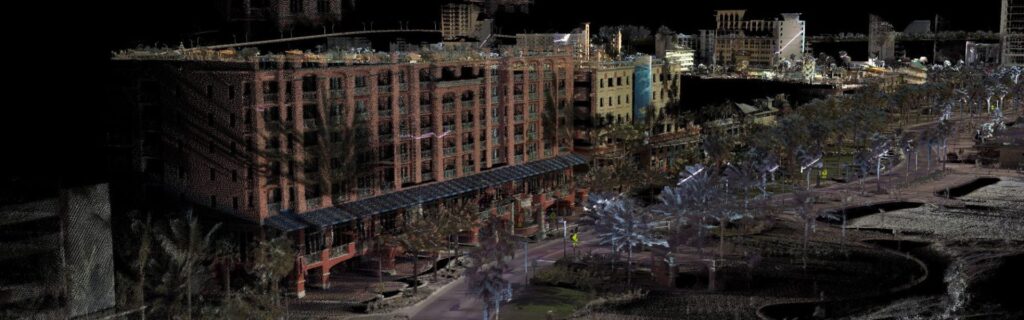
- SLAM : La position calculée à partir de SLAM est préférable dans les environnements denses où les objets environnants sont très diversifiés et proches, comme dans les canyons urbains ou les forêts. Les capacités SLAM sont limitées dans les environnements où les objets sont trop éloignés ou ne sont pas distinguables.
- Inertie : Les informations de vitesses et d'orientation fournies par le Système de Navigation Inertielle (INS) sont capables d'aider à la navigation dans tous les cas où le GNSS et le SLAM sont limités. Le Système de Navigation Inertielle fournit le roulis et le tangage pour contraindre toutes les données LiDAR, de sorte que le nuage de points est référencé au niveau du sol. Les vitesses de rotation sont également très utiles, en particulier lorsqu'un changement de direction brusque se produit. En effet, une compensation d'orientation est nécessaire entre deux scans lorsque le LiDAR est en mouvement.
Ellipse-D, le choix intelligent de VIAMETRIS
Déjà très satisfait de l'Ellipse pour son iMS3D d'intérieur, Jérôme Ninot, le fondateur de VIAMETRIS, n'a pas cherché bien loin pour sélectionner un INS pour son nouveau projet innovant.
“L'INS Ellipse fournit des données de vitesse très, très précises”, déclare M. Ninot.
Le calcul SLAM innovant permet à VIAMETRIS de s'appuyer sur des capteurs inertiels miniatures et économiques, tandis que d'autres systèmes sur le marché nécessitent des systèmes inertiels de plus grande précision. Les capteurs Ellipse offrent une précision d'attitude de 0,1°.
M. Ninot a également choisi le modèle Ellipse-D pour son facteur de forme tout-en-un et miniature, ainsi que pour son récepteur GNSS RTK intégré.
“Avec un INS intégré comme l'Ellipse-D, offrant une interface de communication unique et une synchronisation intégrée au GNSS et au LiDAR, nous avons pu nous concentrer sur notre expertise SLAM” ajoute le PDG, avant de mentionner que moins de câbles est toujours un bon choix.
Ellipse-D, un partenaire pour de nombreuses tâches
Intégré à cette solution innovante, l'Ellipse-D effectue plusieurs tâches. Tout d'abord, il fournit le roulis et le tangage pour contraindre toutes les données LiDAR, de sorte que le nuage de points soit référencé au niveau du sol.
Deuxièmement, les vitesses de virage de l'Ellipse-D sont très utiles, en particulier lorsqu'un changement de direction brusque se produit. En effet, une compensation d'orientation est nécessaire entre deux scans lorsque le LiDAR est en mouvement.
Enfin, l'Ellipse-D fusionne en temps réel les informations inertielles et GNSS pour fournir d'excellentes mesures de vitesse qui sont également très importantes pour assister en permanence les algorithmes internes du vMS3D.

Ellipse-D
L'Ellipse-D est un système de navigation inertielle intégrant un GNSS RTK bi-fréquence à double antenne compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée odomètre avec Pulse ou CAN OBDII pour une précision accrue de la navigation à l'estime.

Demander un devis pour l'Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Comment puis-je combiner des systèmes inertiels avec un LIDAR pour la cartographie par drone ?
La combinaison des systèmes inertiels SBG Systems avec le LiDAR pour la cartographie par drone améliore la précision et la fiabilité de la capture de données géospatiales précises.
Voici comment fonctionne l'intégration et quels sont ses avantages pour la cartographie par drone :
- Une méthode de télédétection qui utilise des impulsions laser pour mesurer les distances jusqu'à la surface de la Terre, créant ainsi une carte 3D détaillée du terrain ou des structures.
- L'INS SBG Systems combine une centrale de mesure inertielle (IMU) avec des données GNSS pour fournir un positionnement, une orientation (tangage, roulis, lacet) et une vitesse précis, même dans les environnements où le GNSS est inaccessible.
Le système inertiel de SBG est synchronisé avec les données LiDAR. L'INS suit avec précision la position et l'orientation du drone, tandis que le LiDAR capture les détails du terrain ou de l'objet en dessous.
En connaissant l'orientation précise du drone, les données LiDAR peuvent être positionnées avec précision dans l'espace 3D.
Le composant GNSS fournit un positionnement global, tandis que l'IMU offre des données d'orientation et de mouvement en temps réel. Cette combinaison garantit que même lorsque le signal GNSS est faible ou indisponible (par exemple, à proximité de bâtiments élevés ou de forêts denses), l'INS peut continuer à suivre la trajectoire et la position du drone, ce qui permet une cartographie LiDAR cohérente.
Qu'est-ce qu'un échosondeur multifaisceaux ?
Le sondeur multifaisceaux (MBES) est une technique avancée de levé hydrographique utilisée pour cartographier le fond marin et les éléments sous-marins avec une grande précision.
Contrairement aux échosondeurs monofaisceaux traditionnels qui mesurent la profondeur en un seul point directement sous le navire, le MBES utilise un ensemble de faisceaux sonar pour capturer simultanément des mesures de profondeur sur une large bande du fond marin. Cela permet une cartographie détaillée et à haute résolution du terrain sous-marin, y compris la topographie, les caractéristiques géologiques et les dangers potentiels.
Les systèmes MBES émettent des ondes sonores qui se propagent dans l'eau, rebondissent sur le fond marin et reviennent au navire. En analysant le temps nécessaire au retour des échos, le système calcule la profondeur en plusieurs points, créant ainsi une carte complète du paysage sous-marin.
Cette technologie est essentielle pour diverses applications, notamment la navigation, la construction maritime, la surveillance environnementale et l'exploration des ressources, fournissant des données essentielles pour la sécurité des opérations maritimes et la gestion durable des ressources marines.
Quelle est la différence entre RTK et PPK ?
Le Real-Time Kinematic (RTK) est une technique de positionnement où les corrections GNSS sont transmises en temps quasi réel, généralement en utilisant un flux de corrections au format RTCM. Cependant, il peut y avoir des défis pour assurer les corrections GNSS, en particulier leur exhaustivité, leur disponibilité, leur couverture et leur compatibilité.
L'avantage majeur du PPK par rapport au post-traitement RTK est que les activités de traitement des données peuvent être optimisées pendant le post-traitement, y compris le traitement aller et retour, alors que dans le traitement en temps réel, toute interruption ou incompatibilité dans les corrections et leur transmission entraînera une précision de positionnement moindre.
Un premier avantage clé du post-traitement GNSS (PPK) par rapport au temps réel (RTK) est que le système utilisé sur le terrain n'a pas besoin d'avoir une liaison de données/radio pour alimenter les corrections RTCM provenant du CORS dans le système INS/GNSS.
La principale limitation à l'adoption du post-traitement est l'exigence de l'application finale d'agir sur l'environnement. D'autre part, si votre application peut supporter le temps de traitement supplémentaire nécessaire pour produire une trajectoire optimisée, elle améliorera considérablement la qualité des données pour tous vos livrables.
