Ingegneria dei veicoli autonomi: la navigazione di Zurich UAS Racing con Ellipse-D
Zurich UAS Racing ha risolto problemi critici di deriva della posizione che in precedenza rendevano impossibile il funzionamento senza conducente. Questa svolta nell'ingegneria dei veicoli autonomi consente ora al team di iniziare il suo percorso verso la disciplina autocross nella famosa competizione Formula Student.
Ellipse-D ci permette di ottenere una posizione assoluta della nostra auto in pista. Una posizione accurata è essenziale per il funzionamento del nostro sistema senza conducente. Uno dei nostri maggiori problemi è stata la deriva della posizione nel tempo. Con Ellipse-D, saremo in grado di affrontare la disciplina autocross, che prima ci era impossibile. | Finn Scheller, C-Leader del Zurich UAS Racing Team.

Il background del team nell'ingegneria dei veicoli autonomi
Zurich UAS Racing (ZUR) è un team appassionato di Formula Student della Zurich University of Applied Sciences di Winterthur, Svizzera. Fondata nel 2019, questa ambiziosa associazione studentesca compete nella più grande competizione ingegneristica del mondo, la Formula Student, costruendo auto elettriche e autonome per gareggiare contro università di tutto il mondo.

Il team è cresciuto fino a oltre 70 studenti motivati provenienti da vari corsi di laurea, tutti uniti dal loro obiettivo di ottimizzare le prestazioni di corsa e far progredire l'ingegneria dei veicoli autonomi.
Formula Student
La competizione Formula Student, di fama internazionale, sfida i team di studenti a progettare e costruire auto da corsa di Formula, competendo in varie discipline tra cui la progettazione ingegneristica, l'analisi dei costi e gli eventi dinamici in pista.

L'auto: ZUR04
Il viaggio di ZUR è iniziato con la loro prima auto funzionale nel 2021, partecipando con successo a eventi di veicoli elettrici (EV) dal 2022. La loro auto da corsa senza conducente, ZUR04, rappresenta l'avanguardia dell'ingegneria dei veicoli autonomi studenteschi con quattro motori elettrici nel mozzo della ruota che producono una potenza totale di 140 kW, consentendo un'accelerazione da 0 a 100 km/h in soli 2,5 secondi.
Il veicolo è progettato sia per la guida umana che per le corse autonome, con prestazioni paragonabili alle auto da corsa professionali. Il suo sistema senza conducente è attualmente in fase di test.
Requisiti tecnici dello Zurich UAS Racing
ZUR necessitava di un avanzato Sistema di Navigazione Inerziale (INS) che potesse integrarsi perfettamente con il loro sistema di corse autonomo, soddisfacendo al contempo i requisiti esigenti delle competizioni ad alta velocità.
La loro sfida principale era ottenere un posizionamento affidabile nell'ambiente dinamico delle corse, dove i sistemi di localizzazione tradizionali spesso falliscono a causa della deriva della posizione nel tempo.
Il sistema doveva fornire una precisione di posizione assoluta essenziale per il funzionamento del loro sistema senza conducente, in particolare per l'impegnativa disciplina autocross che richiede una navigazione precisa attraverso complesse disposizioni di coni.
In sintesi, questi erano i problemi critici:
- Drift di posizione: deriva significativa nel tempo che impedisce una localizzazione accurata.
- Limitazione di Autocross: impossibilità di competere nella disciplina dell'autocross a causa di problemi di posizionamento.
- Informazioni limitate sui dati: dati insufficienti sulla dinamica del veicolo per l'ottimizzazione del software.

E questi erano i requisiti fondamentali:
- Localizzazione precisa: Necessità di una posizione assoluta sul tracciato.
- Integrazione ROS: Integrazione perfetta con il sistema autonomo esistente basato su ROS.
- Soluzione compatta: Unità leggera con un buon rapporto potenza/peso.
- Documentazione aperta: Risorse tecniche facilmente accessibili.
- Dinamiche elevate: Capacità di gestire condizioni di gara estreme.
Dopo aver valutato lo scenario di ZUR, abbiamo raccomandato il nostro Ellipse-D, un sistema di navigazione inerziale (INS) specificamente progettato per applicazioni esigenti in cui precisione e affidabilità sono fondamentali.
La nostra soluzione per le corse autonome: Ellipse-D
Ellipse-D è il più piccolo sistema RTK GNSS/INS a doppia antenna, che fornisce posizionamento a livello centimetrico e rotta precisa per applicazioni di gara dinamiche.
Questa tecnologia rappresenta un significativo progresso nelle soluzioni ingegneristiche per veicoli autonomi, offrendo ai team:
- Alta precisione: Accuratezza di posizionamento a livello centimetrico essenziale per la navigazione precisa in pista e l'evitamento di ostacoli nelle corse autonome.
- Heading a doppia antenna: Prestazioni superiori in ambienti difficili dove le interferenze magnetiche provenienti da motori elettrici e sistemi elettronici comprometterebbero i sistemi tradizionali basati sulla bussola.
- Conformità alle corse: Design compatto e costruzione robusta, ideale per applicazioni di corse ad alta dinamica, con eccezionale gestione delle vibrazioni e resistenza alla temperatura.

Infine, il quarto punto essenziale per le aspirazioni di ZUR era l'integrazione ROS che, nelle loro stesse parole, combinata con le altre caratteristiche, ha reso l'intero pacchetto la soluzione più conveniente disponibile sul mercato:
“Il principale punto di forza per noi è stata la documentazione open-source e la libreria di interfaccia. Il supporto completo tramite ROS è anche un grande vantaggio per noi, dato che la nostra auto utilizza già ROS. Quindi l'integrazione è stata facile. Abbiamo anche apprezzato il supporto di SBG Systems al nostro team per migliorare le nostre prestazioni grazie ai loro prodotti. Rispetto ad altri fornitori di tali prodotti, SBG Systems ci ha offerto il miglior rapporto qualità-prezzo,” sottolinea Scheller.
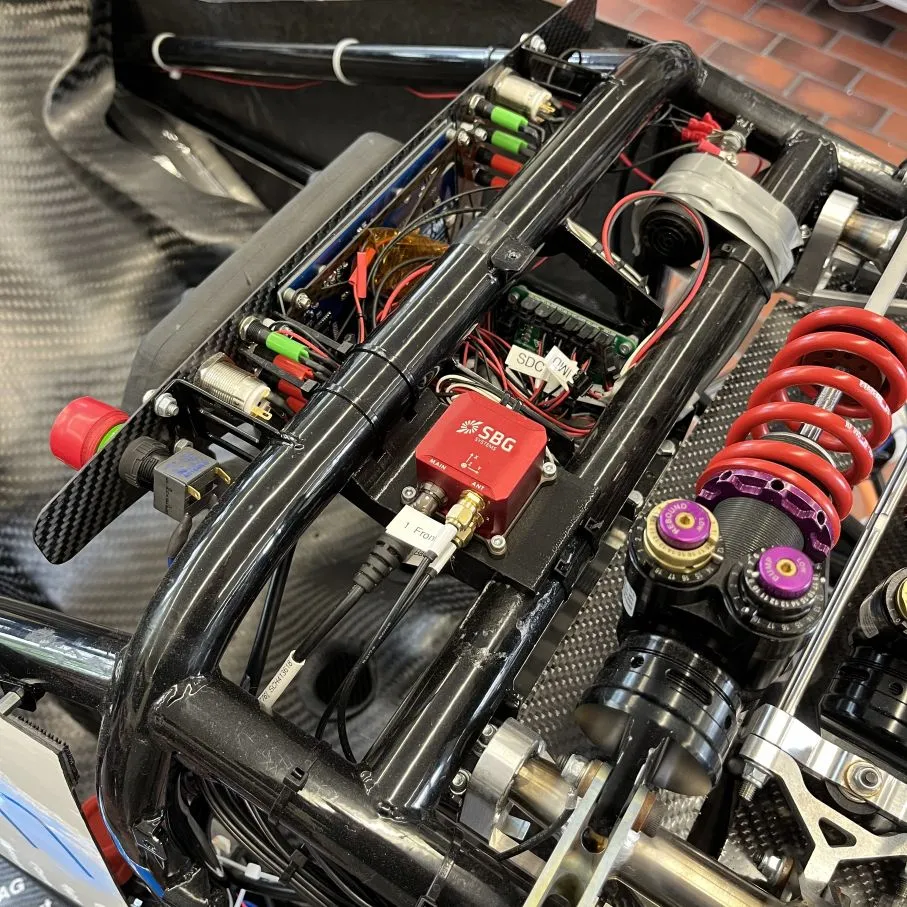
Integrazione e prestazioni avanzate
Il processo di integrazione ha dimostrato la versatilità di Ellipse-D e l'efficacia dell'approccio di supporto di SBG Systems. Collegato sia a una piattaforma di calcolo RaspberryPi che NVIDIA Jetson, il sistema utilizza sia la libreria sbgECom che il pacchetto ROS2 per un accesso e un'elaborazione completi dei dati.
Questa architettura consente la distribuzione dei dati di navigazione in tempo reale in tutto il sistema autonomo, mantenendo la flessibilità necessaria per lo sviluppo di algoritmi personalizzati.
Il team sta anche sfruttando le capacità dell'Ellipse-D per sviluppare algoritmi avanzati di torque vectoring che utilizzano i dati INS. Hanno anche costruito un rover e una stazione base basati su GNSS RTK per fornire una ground truth precisa della pista.
Oltre a integrare l'INS nella loro auto senza conducente ZUR04, con test in pista previsti per questa estate, il team ha incorporato l'INS nella loro auto da corsa di nuova costruzione, ZUR05. L'Ellipse-D sarà anche un componente chiave nel veicolo senza conducente della prossima stagione, lo ZUR06.
Le tre scelte principali di Zurich UAS Racing
ZUR ha evidenziato tre aspetti eccezionali che apprezzano particolarmente della collaborazione con SBG Systems.
- Open source: Innanzitutto, hanno apprezzato l'approccio open source, in linea con la loro missione educativa e la metodologia di sviluppo. La documentazione trasparente e le librerie di interfaccia consentono agli studenti di comprendere e modificare il sistema in base alle loro esigenze specifiche, offrendo preziose opportunità di apprendimento nell'ingegneria dei veicoli autonomi.
- Documentazione eccellente: Il team ha apprezzato la documentazione completa e apertamente disponibile del prodotto, che ha semplificato il loro processo di integrazione. A differenza di molti sistemi commerciali che forniscono dettagli tecnici limitati, l'approccio di SBG Systems ha consentito una rapida comprensione e implementazione.
- Buona comunicazione: Infine, hanno evidenziato l'eccezionale comunicazione e supporto, notando di essersi sempre sentiti ascoltati e di aver ricevuto risposte a tutte le loro domande. Questo supporto reattivo si è rivelato cruciale per un team di studenti che lavorava entro scadenze di competizione ristrette.
Conclusione
L'implementazione ha risolto la sfida più critica di ZUR: la deriva della posizione che in precedenza aveva impedito loro di competere nella disciplina autocross. Grazie alla precisione a livello centimetrico dell'Ellipse-D e alla determinazione dell'orientamento a doppia antenna, il team può ora iniziare le prove con l'obiettivo di competere senza pilota nella prossima stagione (Estate 2026) con la loro auto da corsa di prossima generazione.

Questa collaborazione esemplifica il potere delle partnership industria-istruzione nel far progredire la tecnologia dei veicoli autonomi.
"Ellipse è il punto di ingresso perfetto nei sistemi INS. In futuro, prevediamo di utilizzare sistemi più potenti in combinazione con il nostro sistema veicolare basato su Ethernet di nuova concezione", conclude Scheller.
Il nostro impegno a supportare team di studenti come ZUR dimostra come fornire accesso a tecnologia di navigazione di livello professionale consenta alla prossima generazione di ingegneri di spingere i confini di ciò che è possibile nelle corse autonome.
Ellipse-D
Ellipse-D è un sistema di navigazione inerziale compatto e ad alte prestazioni, assistito da GNSS, che fornisce misurazioni affidabili di orientamento, posizione e beccheggio.
Combina una IMU con un ricevitore GNSS a doppia banda e utilizza algoritmi di sensor fusion per fornire un posizionamento accurato in ambienti difficili.
Offre la capacità di doppia antenna per un heading preciso in condizioni statiche.

Richiedi un preventivo per Ellipse-D
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Come funzionano le auto a guida autonoma?
Le auto a guida autonoma sono veicoli dotati di sistemi sofisticati che consentono loro di navigare e controllarsi senza intervento umano. Questi veicoli utilizzano una combinazione di sensori di guida autonoma e algoritmi per percepire l'ambiente circostante, prendere decisioni ed eseguire attività di guida autonoma. L'obiettivo è raggiungere la piena autonomia, in cui il veicolo è in grado di gestire tutti gli aspetti della guida in modo sicuro ed efficiente.
Le auto a guida autonoma si affidano a una serie di tecnologie chiave per percepire l'ambiente circostante, tra cui:
- GNSS (Global Navigation Satellite System): per ottenere aggiornamenti in tempo reale sulla posizione, la velocità e la direzione dell'auto a guida autonoma.
- INS (Inertial Navigation Systems): per mantenere la precisione in caso di interruzioni del segnale GNSS. Fornisce aggiornamenti in tempo reale sulla posizione, velocità e direzione dell'auto a guida autonoma.
- LiDAR (Light Detection and Ranging): utilizzo di raggi laser per creare una mappa 3D dettagliata dell'ambiente del veicolo. Questa tecnologia aiuta l'auto a rilevare e misurare gli oggetti circostanti, inclusi altri veicoli, pedoni e segnali stradali.
- Radar (Radio Detection and Ranging): uso di onde radio per rilevare la velocità, la distanza e la direzione degli oggetti. Il radar è particolarmente utile in condizioni meteorologiche avverse e per rilevare oggetti a distanze maggiori.
- Telecamere: per acquisire informazioni visive sull'ambiente circostante il veicolo, tra cui segnaletica orizzontale, segnali stradali e cartelli. Sono essenziali per interpretare segnali visivi complessi e prendere decisioni basate su dati visivi.
Quali sono i 6 gradi di automazione nei veicoli?
I 6 livelli delle auto a guida autonoma, definiti dalla Society of Automotive Engineers (SAE) nel loro standard J3016, descrivono i gradi di automazione nei veicoli. Ecco una ripartizione:
- Livello 0: nessuna automazione. Avvisi o assistenza momentanea, come la frenata automatica di emergenza o gli avvisi di angolo cieco, ma nessuna automazione prolungata.
- Livello 1: assistenza alla guida. Sistema automatizzato singolo per il supporto, come il cruise control adattivo (mantenimento della velocità e della distanza) o l'assistenza al mantenimento della corsia.
- Livello 2: automazione parziale. Combinazione di sistemi, come lo sterzo e l'accelerazione/decelerazione, ma nessuna presa di decisioni.
- Livello 3: automazione condizionata. L'auto gestisce la maggior parte delle operazioni di guida in condizioni specifiche (ad esempio, la guida in autostrada). Il sistema può monitorare l'ambiente.
- Livello 4: automazione elevata. L'auto funziona in modo indipendente in scenari predefiniti. Non è richiesta l'attenzione del conducente in queste aree.
- Livello 5: automazione completa. Il veicolo può eseguire tutte le operazioni in ogni ambiente che un conducente umano potrebbe gestire. Potrebbe non essere presente il volante o i pedali.
Questi livelli illustrano la progressione dai veicoli controllati dall'uomo a sistemi completamente autonomi in grado di gestire tutte le attività di guida.
L'INS accetta input da sensori di ausilio esterni?
I sistemi di navigazione inerziale della nostra azienda accettano input da sensori di ausilio esterni, come sensori di dati aerei, magnetometri, odometri, DVL e altri.
Questa integrazione rende l'INS altamente versatile e affidabile, specialmente in ambienti privi di GNSS.
Questi sensori esterni migliorano le prestazioni complessive e la precisione dell'INS fornendo dati complementari.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
