Розробка автономних транспортних засобів: система навігації Zurich UAS Racing на базі Ellipse
Команда Zurich UAS Racing вирішила критичні проблеми зі зсувом позиції, які раніше унеможливлювали для них безпілотну експлуатацію. Цей прорив у галузі розробки автономних транспортних засобів тепер дозволяє команді розпочати свій шлях у дисципліні автокросу в рамках знаменитого конкурсу Formula Student.
Ellipse дозволяє нам отримувати абсолютне положення нашого автомобіля на трасі. Точне визначення положення є надзвичайно важливим для роботи нашої системи безпілотного керування. Однією з наших найбільших проблем було зміщення положення з часом. Завдяки Ellipse ми зможемо взяти участь у дисципліні автокросу, що раніше було для нас неможливим. | Фінн Шеллер, керівник команди Zurich UAS Racing.

Досвід команди у сфері розробки автономних транспортних засобів
Zurich UAS Racing (ZUR) — це команда-ентузіасти з проекту «Формула Студент», що представляє Цюрихський університет прикладних наук у Вінтертурі, Швейцарія. Засноване у 2019 році, це амбітне студентське об’єднання бере участь у найбільшому в світі інженерному конкурсі «Формула Студент», створюючи електричні та автономні автомобілі для змагань з університетами з усього світу.

Команда розрослася до понад 70 мотивованих студентів з різних спеціальностей, яких об’єднує спільна мета — оптимізація гоночних показників та розвиток технологій створення автономних транспортних засобів.
Формула Студент
Міжнародний конкурс «Formula Student», що користується високою репутацією, ставить перед студентськими командами завдання спроектувати та побудувати гоночні боліди «Формули», які беруть участь у змаганнях з різних дисциплін, зокрема з інженерного проектування, аналізу витрат та динамічних трасових випробувань.

Автомобіль: ZUR04
Історія компанії ZUR розпочалася у 2021 році з випуску першого працездатного автомобіля, а з 2022 року вона успішно бере участь у змаганнях з електромобілів (EV). Їхній безпілотний гоночний автомобіль ZUR04 є взірцем передових досягнень студентської інженерії в галузі автономних транспортних засобів: чотири електродвигуни, вбудовані в маточини коліс, забезпечують сумарну потужність 140 кВт, що дозволяє розігнатися від 0 до 100 км/год всього за 2,5 секунди.
Автомобіль призначений як для гонок з водієм, так і для автономних перегонів, а його характеристики можна порівняти з професійними гоночними автомобілями. Система безпілотного керування наразі перебуває на стадії тестування.
Технічні вимоги команди Zurich UAS Racing
Компанії ZUR була потрібна сучасна інерційна навігаційна система (INS), яка б безперешкодно інтегрувалася з їхньою системою автономних перегонів і водночас відповідала високим вимогам змагань на високих швидкостях.
Головним завданням було забезпечити надійне визначення координат у динамічних умовах перегонів, де традиційні системи локалізації часто дають збій через зсув позиції з часом.
Система мала забезпечувати абсолютну точність позиціонування, необхідну для роботи безпілотної системи, особливо у складній дисципліні автокросу, яка вимагає точної навігації серед складних конфігурацій конусів.
Отже, коротко кажучи, критичними проблемами були такі:
- Зсув положення: значний зсув з плином часу, що заважає точній локалізації.
- Обмеження щодо автокросу: неможливість брати участь у змаганнях з автокросу через проблеми з розміщенням.
- Обмежені можливості аналізу даних: недостатньо даних про динаміку руху автомобіля для оптимізації програмного забезпечення.

А ось основні вимоги:
- Точна локалізація: необхідність визначення абсолютного положення на трасі.
- Інтеграція з ROS: Безперебійна інтеграція з існуючою автономною системою на базі ROS.
- Компактне рішення: легкий пристрій з хорошим співвідношенням потужності та ваги.
- Відкрита документація: технічні матеріали, доступні для загального користування.
- Висока динаміка: здатність витримувати екстремальні умови гонок.
Оцінивши сценарій компанії ZUR, ми запропонували нашу Ellipse — інерційну навігаційну систему (INS), спеціально розроблену для складних завдань, де точність і надійність мають першочергове значення.
Наше рішення для автономних перегонів: Ellipse
Ellipse — це найкомпактнішаINS RTKINS з двома антенами, що забезпечує позиціонування з точністю до сантиметра та точне heading динамічних гоночних застосувань.
Ця технологія є значним кроком вперед у розробці інженерних рішень для автономних транспортних засобів і пропонує команді:
- Висока точність: точність позиціонування з точністю до сантиметра є необхідною умовою для точної навігації по трасі та уникнення перешкод під час автономних перегонів.
- heading з двома антенами: Висока ефективність у складних умовах, де магнітні перешкоди від електродвигунів та електронних систем можуть негативно впливати на роботу традиційних систем на основі компаса.
- Відповідність вимогам автоспорту: компактна конструкція та міцне виконання, що ідеально підходять для високодинамічних гоночних умов, з винятковою стійкістю до вібрацій та температур.

Нарешті, четвертим важливим аспектом для реалізації амбіцій компанії ZUR стала інтеграція ROS, яка, за їхніми словами, у поєднанні з іншими функціями зробила цей пакет найбільш економічно вигідним рішенням серед усіх доступних на ринку:
«Головним аргументом на користь цього рішення для нас стала документація з відкритим кодом та бібліотека інтерфейсів. Повна підтримка через ROS також є для нас великою перевагою, оскільки наш автомобіль уже працює на базі ROS. Тож інтеграція пройшла легко. Ми також високо оцінили підтримку, яку надала SBG Systems нашій команді, щоб ми могли покращити наші результати завдяки їхнім продуктам. Порівняно з іншими постачальниками подібних продуктів, SBG Systems нам найкраще співвідношення ціни та якості», — підкреслює Шеллер.
Розширена інтеграція та продуктивність
Процес інтеграції продемонстрував універсальність Ellipse та ефективність підходу до технічної підтримки SBG Systems. Підключена одночасно до обчислювальних платформ Raspberry Pi та NVIDIA Jetson, система використовує бібліотеку sbgECom та пакет ROS2 для комплексного доступу до даних та їх обробки.
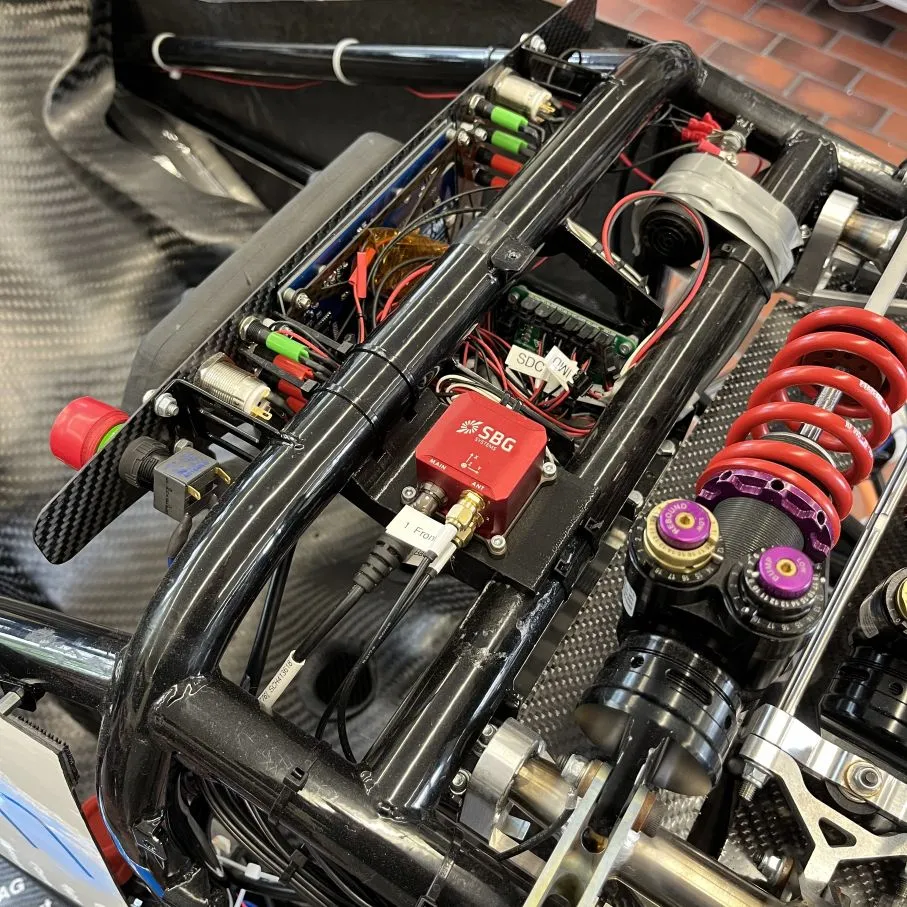
Ця архітектура забезпечує розподіл навігаційних даних у реальному часі по всій автономній системі, зберігаючи при цьому гнучкість, необхідну для розробки власних алгоритмів.
Команда також використовує можливості Ellipse для розробки вдосконалених алгоритмів векторного розподілу крутного моменту, що базуються на INS . Крім того, вони створили ровер та базову станцію GNSS для забезпечення точної наземної референції траси.
Окрім інтеграції INS свій безпілотний автомобіль ZUR04, випробування якого на трасі заплановано на це літо, команда встановила INS свій нещодавно побудований гоночний автомобіль ZUR05. Ellipse також стане ключовим компонентом безпілотного автомобіля наступного сезону — ZUR06.
Трійка фаворитів команди Zurich UAS Racing
Компанія ZUR виділила три основні аспекти, які їм найбільше подобаються у співпраці з SBG Systems.
- Відкрите програмне забезпечення: По-перше, вони високо оцінили підхід на основі відкритого програмного забезпечення, який відповідає їхній освітній місії та методології розробки. Прозора документація та бібліотеки інтерфейсів дають студентам змогу зрозуміти систему та модифікувати її відповідно до своїх конкретних потреб, що відкриває безцінні можливості для навчання в галузі проектування автономних транспортних засобів.
- Відмінна документація: Команда високо оцінила вичерпну та загальнодоступну документацію щодо продукту, яка спростила процес інтеграції. На відміну від багатьох комерційних систем, що надають обмежену технічну інформацію, підхід SBG Systemsдозволив швидко розібратися в продукті та впровадити його.
- Ефективна комунікація: Наостанок вони відзначили чудову комунікацію та підтримку, зазначивши, що завжди відчували, що їх чують, і отримували відповіді на всі свої запитання. Така оперативна підтримка виявилася вирішальною для студентської команди, яка працювала в умовах жорстких термінів конкурсу.
Висновок
Впровадження цієї системи дозволило вирішити найгострішу проблему ZUR: зсув позиції, який раніше не давав їм можливості брати участь у змаганнях з автокросу. Завдяки точності Ellipse на рівні сантиметрів та heading за допомогою двох антен команда тепер може розпочати випробувальні заїзди з метою участі в змаганнях без пілота в наступному сезоні (літо 2026 року) на своєму гоночному автомобілі нового покоління.

Ця співпраця є яскравим прикладом того, як партнерство між промисловістю та освітою сприяє розвитку технологій автономних транспортних засобів.
Ellipse ідеальний стартовий варіант для INS . У майбутньому ми плануємо використовувати більш потужні системи у поєднанні з нашою новою автомобільною системою на базі Ethernet», — підсумовує Шеллер.
Наше прагнення підтримувати студентські команди, такі як ZUR, демонструє, як доступ до професійних навігаційних технологій дає змогу інженерам нового покоління розширювати межі можливого в автономних перегонах.
Ellipse-D
Ellipse — це компактна високопродуктивна інерційна навігаційна система GNSS, яка забезпечує надійні heave орієнтації, положення та heave .
Вона поєднує в собі IMU дводіапазонним GNSS і використовує алгоритми об'єднання даних з різних датчиків для забезпечення точного позиціонування в складних умовах.
Система оснащена двома антенами, що забезпечує точне heading стаціонарних умовах.

Запитайте ціну на Ellipse
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
Як працюють безпілотні автомобілі?
Автомобілі з автономним керуванням — це транспортні засоби, оснащені складними системами, що дозволяють їм орієнтуватися в просторі та керувати собою без втручання людини. Ці транспортні засоби використовують поєднання датчиків автономного керування та алгоритмів для сприйняття навколишнього середовища, прийняття рішень та виконання завдань з автономного керування. Мета полягає в досягненні повної автономності, за якої транспортний засіб зможе безпечно та ефективно виконувати всі аспекти керування.
Автомобілі з автопілотом використовують цілий ряд ключових технологій для сприйняття навколишнього середовища. До них належать:
- GNSS Глобальна навігаційна супутникова система): для отримання даних у режимі реального часу про місцезнаходження, швидкість та напрямок руху безпілотного автомобіля.
- INS інерційні навігаційні системи): для забезпечення точності у разі зникнення GNSS . Система надає дані в режимі реального часу про місцезнаходження, швидкість та напрямок руху безпілотного автомобіля.
- LiDAR (Light Detection and Ranging): використання лазерних променів для створення детальної 3D-карти навколишнього простору автомобіля. Ця технологія допомагає автомобілю виявляти та вимірювати відстань до об’єктів навколо нього, зокрема інших транспортних засобів, пішоходів та дорожніх знаків.
- Радар (Radio Detection and Ranging): використання радіохвиль для визначення швидкості, відстані та напрямку руху об’єктів. Радар особливо корисний у несприятливих погодних умовах та для виявлення об’єктів на великих відстанях.
- Камери: призначені для збору візуальної інформації про оточення автомобіля, зокрема про розмітку смуг руху, світлофори та дорожні знаки. Вони відіграють ключову роль у розпізнаванні складних візуальних сигналів та прийнятті рішень на основі візуальних даних.
Які існують 6 рівнів автоматизації в автомобілях?
6 рівнів автономних автомобілів, визначених Товариством інженерів-автомобілебудівників (SAE) у стандарті J3016, описують ступені автоматизації транспортних засобів. Ось їхній перелік:
- Рівень 0: відсутність автоматизації. Попередження або короткочасна допомога, наприклад автоматичне екстрене гальмування або попередження про сліпі зони, але без тривалої автоматизації.
- Рівень 1: системи допомоги водієві. Окрема автоматизована система підтримки, така як адаптивний круїз-контроль (підтримка швидкості та дистанції) або система утримання смуги руху.
- Рівень 2: часткова автоматизація. Поєднання систем, таких як керування та прискорення/гальмування, але без прийняття рішень.
- Рівень 3: умовна автоматизація. Автомобіль виконує більшість завдань з керування в певних умовах (наприклад, під час руху по автомагістралі). Система здатна відстежувати навколишнє середовище.
- Рівень 4: високий ступінь автоматизації. Автомобіль рухається автономно у заздалегідь визначених ситуаціях. У таких умовах увага водія не потрібна.
- Рівень 5: повна автоматизація. Транспортний засіб може виконувати всі завдання в будь-яких умовах, з якими міг би впоратися водій-людина. Кермо та педалі можуть бути відсутні.
Ці рівні ілюструють перехід від транспортних засобів, керованих людиною, до повністю автономних систем, здатних виконувати всі завдання, пов’язані з керуванням автомобілем.
Чи INS сигнали від зовнішніх допоміжних датчиків?
Інерційні навігаційні системи нашої компанії приймають сигнали від зовнішніх допоміжних датчиків, таких як датчики аеродинамічних даних, магнітометри, одометри, цифрові лінійні датчики (DVL) та інші.
Така інтеграція робить INS універсальною та надійною системою, особливо вdenied .
Ці зовнішні датчики підвищують загальну ефективність та точність інерційної навігаційної системи ( INS надаючи додаткові дані.
У чому полягає різниця між IMU INS?
Різниця між інерційним вимірювальним блоком (IMU) та інерційною навігаційною системою (INS) полягає в їхній функціональності та складності.
IMU інерційний вимірювальний блок) надає необроблені дані про лінійне прискорення та кутову швидкість транспортного засобу, виміряні акселерометрами та гіроскопами. Він надає інформацію про roll, pitch, рискання та рух, але не обчислює дані про положення або навігацію. IMU спеціально IMU для передачі основних даних про рух та орієнтацію для зовнішньої обробки з метою визначення положення або швидкості.
З іншого боку, INS інерційна навігаційна система) поєднує IMU з передовими алгоритмами для обчислення положення, швидкості та орієнтації транспортного засобу в часі. Вона включає навігаційні алгоритми, такі як фільтрація Калмана, для злиття та інтеграції даних датчиків. INS навігаційні дані в режимі реального часу, включаючи положення, швидкість та орієнтацію, не покладаючись на зовнішні системи позиціонування, такі як GNSS.
Ця навігаційна система зазвичай використовується в додатках, що вимагають комплексних навігаційних рішень, особливо вdenied , таких як військові БПЛА, кораблі та підводні човни.
У чому полягає різниця між AHRS INS?
Основна відмінність між системою орієнтації та курсу (AHRS) та інерційною навігаційною системою (INS) полягає в їхній функціональності та обсязі даних, які вони надають.
AHRS інформацію про орієнтацію, а саме про положення (pitch, roll) та heading поворот) транспортного засобу або пристрою. Зазвичай вона використовує комбінацію датчиків, зокрема гіроскопів, акселерометрів та магнітометрів, для обчислення та стабілізації орієнтації. AHRS кутове положення по трьох осях (pitch, roll та відхилення), що дозволяє системі розуміти своє положення у просторі. Вона часто використовується в авіації, безпілотних літальних апаратах, робототехніці та морських системах для надання точних heading положення та heading , що є критично важливим для керування та стабілізації транспортного засобу.
Система INS тільки надає дані про орієнтацію (як і система AHRS), але й відстежує положення, швидкість та прискорення транспортного засобу в динаміці. Вона використовує інерційні датчики для оцінки руху в тривимірному просторі, не покладаючись на зовнішні джерела, такі як GNSS. Система поєднує датчики, що входять до складу AHRS гіроскопи, акселерометри), але також може містити більш досконалі алгоритми для відстеження положення та швидкості, часто інтегруючись із зовнішніми даними, такими як GNSS підвищення точності.
Отже, AHRS на орієнтації (кут нахилу та heading), тоді як INS повний набір навігаційних даних, включаючи координати, швидкість та орієнтацію.
