
Tous les types de levés, et plus généralement, l'océanographie et l'hydrographie, nécessitent un capteur inertiel. Ces solutions vont des MRU aux INS/GNSS haut de gamme, et leur sélection ne doit pas être prise à la légère. Il est crucial de choisir le bon capteur en fonction du type d'application et de ses besoins. Alors, comment choisir la meilleure solution inertielle ?
C'est la raison pour laquelle nous avons mis nos différentes gammes de produits à l'épreuve lors d'un levé de 3 jours avec un échosondeur multifaisceaux dans 3 zones du port de Hambourg (Allemagne) : les docks de Hambourg, sous les ponts et dans les chenaux de la ville.
Être en mesure d'attester des performances de nos solutions dans divers environnements et à plusieurs niveaux de précision était essentiel pour pouvoir recommander quel INS utiliser en fonction de l'application et des conditions.
Découvrons ensemble comment choisir la meilleure solution inertielle.
Petites intégrations marines et levés bathymétriques en eaux très peu profondes
L'hydrographie n'implique pas seulement des levés sur de grands navires, mais inclut également les AUV, USV, ou même les bouées. Compte tenu de la taille de ces applications, un capteur inertiel miniature et robuste peut s'avérer idéal. SBG Systems a développé la réponse la plus innovante à votre besoin : Comment choisir la meilleure solution inertielle ?
La gamme de produits miniature Ellipse de SBG Systems s'étend des AHRS aux GNSS/INS RTK bi-antennes, le tout dans de petits boîtiers IP68.
La robustesse étant cruciale dans les applications marines, tous les MRU et INS de SBG Systems bénéficient d'une procédure d'étalonnage individuelle haut de gamme de -40 à 85°C.
Nous sélectionnons rigoureusement les capteurs inertiels, garantissant que seuls ceux répondant aux spécifications fournissent des mesures cohérentes pour les missions des professionnels.


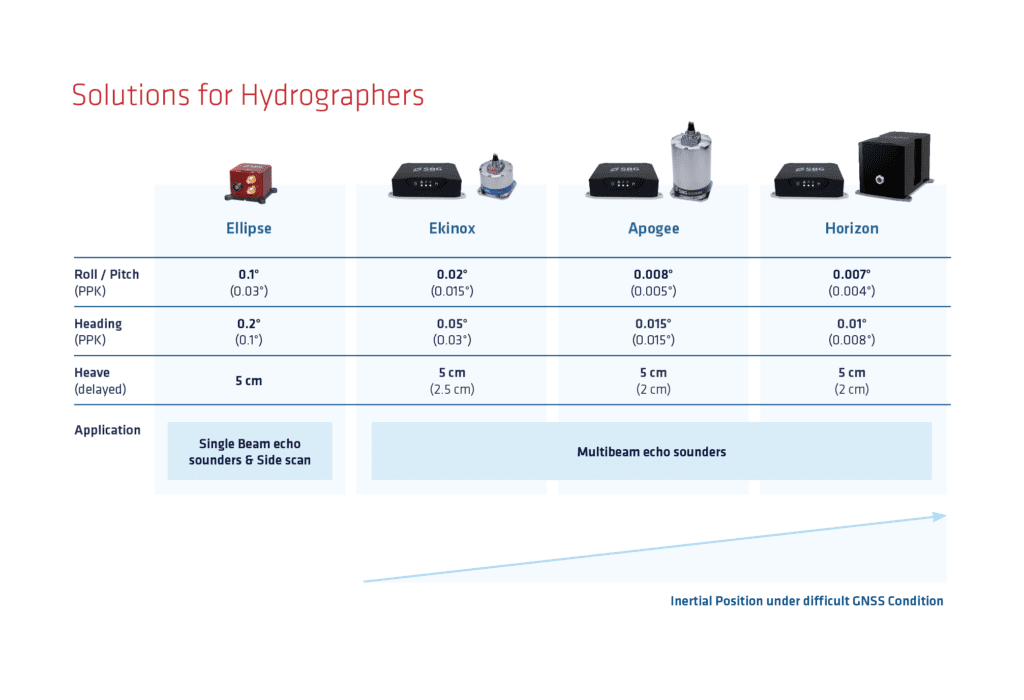
Ellipse sensors deliver a 5-cm accurate real-time heave that automatically adjusts to the wave period and provides unmatched performance in attitude (0.05°) and heading (0.2°).
In addition to buoys, small USV, and AUV solutions for navigation or surveying, these inertial sensors can also compensate and stabilize a single beam or side scan echosounder.
However, they can only offer optimal performance in open-sky surveys in very shallow waters (< 10 meters) in near-shore areas with low motion, offering a cost-effective package for these types of surveys. Indeed, the Ellipse’s RTK Heave directly provides a precise altitude, which is well-suited for near-shore surveying.
Levés à ciel ouvert et peu profonds
Les données bathymétriques et inertielles collectées lors du levé montrent que tous les capteurs fournissent un mouvement, un cap et une position de haute précision lors d'un levé en eaux peu profondes et à ciel ouvert.
Bien que l'Ellipse ne soit pas recommandé pour les levés MBES de haute précision, l'Ekinox, ou Navsight Ekinox, est la solution la plus adaptée et peut offrir une solution attrayante en temps réel pour les levés à ciel ouvert et en eaux peu profondes dans les zones côtières.
Les systèmes de navigation inertielle Ekinox se présentent sous la forme de capteurs tout-en-un de qualité industrielle, allant du MRU aux INS/GNSS RTK haut de gamme, ou en tant que partie de la solution Marine.
Les deux offrent les mêmes performances et la même précision : 0,02° Roulis/Tangage (RTK), 0,05° Cap GNSS et une position au centimètre près.
En tant que capteurs compacts tout-en-un, ils peuvent être intégrés dans des équipements où l'espace est critique, tels que les USV pour les levés hydrographiques.

Conçue pour faciliter les tâches des hydrographes, la solution Navsight Marine est disponible en tant qu'unité de référence de mouvement (MRU), fournissant le roulis, le tangage et le pilonnement, ou en tant que solution de navigation complète intégrant un récepteur GNSS tri-fréquence ou utilisant un récepteur GNSS externe.
L'IMU Ekinox est connectée à l'unité de traitement. Cette configuration très pratique permet de positionner l'IMU près de l'écho-sondeur tandis que l'unité de traitement se trouve dans la cabine et est connectée à l'ordinateur de l'opérateur.
Une solution inertielle pour chaque type de coupure GNSS
Les coupures GNSS peuvent survenir dans divers environnements, notamment lors de la navigation sous des ponts ou de la réalisation de levés de chenaux fluviaux et d'installations portuaires.
Elles représentent un défi pour tous les levés hydrographiques et soulignent la nécessité d'un système de navigation inertielle couplé au GNSS, qui fusionne les données inertielles et GNSS pour une trajectoire continue de plus haute précision.
Les résultats des levés sous les ponts montrent que le capteur inertiel maintient la précision avec des données RTK améliorées, d'attitude, de cap et de pilonnement. Le cap semble être beaucoup plus stable avec le Navsight Apogee, car il intègre des gyroscopes plus performants.
Cette solution fournit également des données inertielles et de position plus précises, ce qui en fait le bon choix pour cette application.
Le logiciel Qinertia de SBG Systems résout les coupures GNSS en post-traitant les données de levé, garantissant ainsi des résultats précis grâce à la technologie PPK avancée.

La combinaison de l'Apogee et de Qinertia permet une solution fiable et extrêmement précise en cas de longues coupures GNSS.
De forts effets de trajets multiples GNSS dans les chenaux fluviaux provoquent de fréquentes petites coupures, plus difficiles à gérer que les longues coupures GNSS.
Les effets de trajets multiples perturbent le double cap GNSS et le calcul de la position, augmentant les erreurs, ce qui rend les solutions inertielles à couplage lâche peu fiables dans de telles conditions.
Complémentarité avec un logiciel de post-traitement PPK
Cet environnement exige des INS/GNSS haut de gamme pour des données de roulis/tangage stables, avec un post-traitement étroitement couplé pour filtrer les effets multi-trajets.
Le calcul PPK améliore le cap et le mouvement, et le couplage étroit améliore considérablement la position.
Très performante, la solution Navsight Apogee (0,008° de roulis/tangage, 0,015° de cap GNSS et une position au centimètre près) fournit, avec le logiciel Qinertia PPK, l'ensemble optimal dans de telles conditions. Elle permet également des levés de haute précision en eaux profondes, même au large.
Alors que les solutions de mouvement et de navigation Ekinox et Apogee sont basées sur la technologie MEMS, le Navsight Horizon intègre une IMU FOG à boucle fermée qui permet des performances robustes et cohérentes dans les environnements les plus exigeants, comme les zones très denses ou les levés à faible dynamique.
Nous avons post-traité les données de ce système pour des tests de levés bathymétriques à Hambourg, garantissant ainsi les meilleures performances en tant que système de référence.
De plus, les capteurs SBG Systems sont compatibles avec tous les logiciels d'hydrographie qui acceptent les protocoles ASCII, NMEA et TSS. D'autres logiciels ont développé des pilotes qui s'adaptent au protocole binaire de SBG, facilitant ainsi l'intégration du capteur.
Avez-vous trouvé la réponse au dilemme : comment choisir la meilleure solution inertielle ?
Temps réel ou post-traitement ?
Dans ces différents levés, le post-traitement s'est avéré améliorer les résultats des levés dans les conditions les plus difficiles.
Dans les environnements GNSS difficiles, le logiciel de post-traitement garantit des performances optimales, contrairement aux levés à ciel ouvert qui s'appuient sur des données en temps réel pour la précision.
Le calcul avant et arrière et les algorithmes PPK de pointe permettent d'atteindre le plus haut niveau de précision. Robuste contre l'effet de trajets multiples, le couplage étroit est essentiel dans de telles conditions.
Qinertia simplifie le post-traitement pour les hydrographes, en offrant un outil intuitif conçu pour faciliter les tâches des géomètres et rationaliser efficacement les flux de travail.
Efficace, rapide et simple, ce logiciel de post-traitement GNSS seul et INS/GNSS complet donne accès aux corrections RTK hors ligne de plus de 8 000 stations de base situées dans 164 pays. Il prend en charge les IMU tierces et tous les récepteurs GNSS et comprend une fonction VBS (Virtual Base Station) et le calcul PPP.
Cette solution rentable permet de réaliser des levés même dans des conditions difficiles et permet de corriger les paramètres d'installation après coup pour sauver la mise !
