杆臂 自动化 INS–GNSS 杆臂校准
在安装惯性导航系统 (INS) 时,配置 INS 与 GNSS 天线之间以及 INS 与里程计或 DVL 等附加传感器之间的杆臂是一个真正的挑战。
为了简化此操作并提高效率和精度,我们提供了多种杆臂解决方案,旨在自动重新估计杆臂。它们消除了仔细手动测量的需要,允许 SBG systems 的用户在安装 IMU 时使用粗略估计,然后使用该工具进行细化。
立即试用!
用于可靠传感器融合的杆臂估计工具
SBG Systems 全面的杠杆臂估算工具套件,满足各类运行需求。其嵌入式工具集成于高性能惯性系统(HPI)界面,可实时估算主次杠杆臂参数,性能超越仅支持双天线对准的竞品。Qinertia杠杆臂工具采用Qinertia引擎的松耦合模式,作为免费独立解决方案,需基于RTK获取的数据运行。 您只需连接互联网即可登录MySBG平台(
)。Qinertia Cloud 支持基于浏览器的快速杠杆臂估算,通过简单拖拽工作流实现灵活的现场校准,同样依赖RTK数据且GNSS 。Qinertia PPK软件 GNSS 实现测绘级精度(需许可证),确保最高精度。这四种解决方案共同保障所有用户的精确杠杆臂校准,提升传感器融合可靠性,并在跨平台跨环境场景中保证稳定的高性能导航。




什么是杆臂?
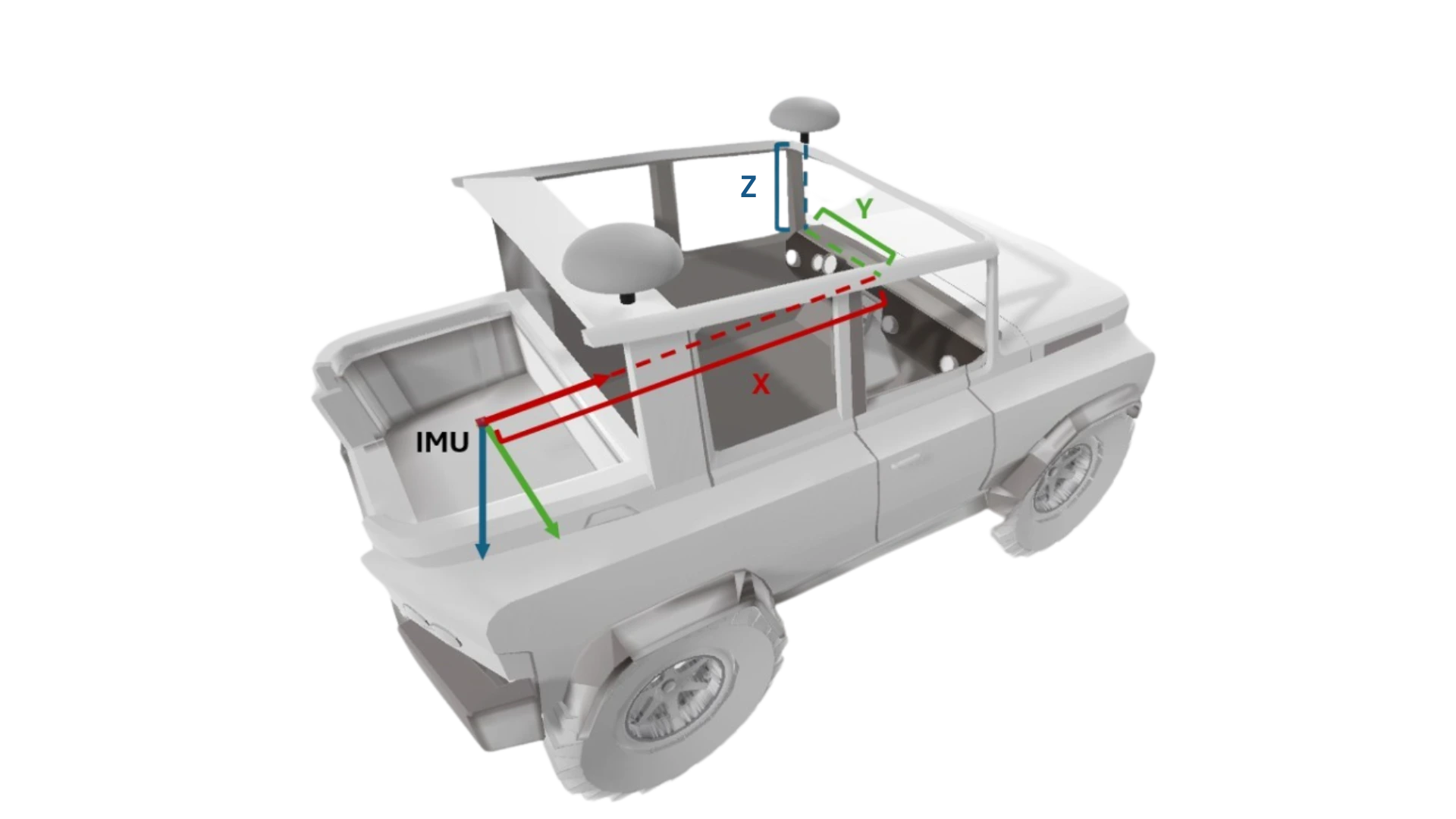
杠杆臂是 GNSS 天线或平台上其他参考点相对于 INS 参考点的位置偏移,通常表示为 3D 矢量 (X, Y, Z)。这在 GNSS/INS 融合中至关重要,因为 GNSS 提供天线的位置,而 INS 计算的姿态信息是在传感器本身内参考的,该传感器安装在不同的位置。
天线位置和 INS 位置之间的这种偏移意味着这些点在运动过程中会经历不同的动态。
即使杠杆臂测量中的微小误差也可能导致显著的定位不准确。传统上,这需要仔细的手动测量,但在实践中存在一些挑战:
– 人为错误:测量中的微小错位可能导致定位计算中的累积误差。
– 难以接近安装点:IMU 和 GNSS 天线可能安装在难以到达的位置,从而使精确测量变得困难。
– 耗时的过程: 确保高精度需要多次检查和验证,从而增加了安装过程的额外时间。
完整的杆臂生态系统
云端杆臂
Qinertia Cloud 专用的杠杆臂估算服务,用户可完全通过网页浏览器访问,无需安装,工作流程简单到只需拖放数据即可上传。与独立工具类似,该服务同样需配合支持RTK功能的数据采集系统使用。
该服务目前处于测试版阶段,完全免费试用且无需桌面端安装。用户现可通过Qinertia Cloud 体验该服务。
独立杆臂
独立杆臂估算工具随 Qinertia 安装包提供,但独立运行,无需 Qinertia 许可证即可提供杆臂估算。
该工具仅支持 SBG INS 产品,并且在可用时,还可以估算里程计和 DVL 等辅助传感器的杆臂。它使用与完整 Qinertia 软件相同的处理引擎,但仅在松耦合模式下运行,因此,应与使用 RTK 记录的采集数据一起使用,以确保最佳结果。通过安装 Qinertia 桌面软件并使用 MySBG 账户登录即可访问,并且免费提供。该工具为希望进行精确校准但不需要 Qinertia 许可证的用户提供了便捷的工作流程。
嵌入式杆臂
嵌入式杆臂估算工具直接集成在 SBG 的 Ekinox、Apogee、Quanta 和 Navsight 产品系列中,无需外部软件即可提供实时校准。
它能够估算主杆臂和副杆臂。用户通过其 HPI INS 设备的网络界面访问此功能,并且该功能不收取额外费用。
这使其成为一个强大的解决方案,适用于需要即时、设备上校准和持续性能反馈的用户。
Qinertia PPK 软件杆臂
在 Qinertia PPK 软件中,用户可以使用最精确的杆臂估算功能。通过注入 GNSS 校正并执行完整的后处理融合,该工具可提供测量级精度,是要求苛刻应用的优质解决方案。访问需要有效的 Qinertia 许可证,但它支持最广泛的数据范围,并在需要最高精度时提供最强的估算性能。




选择您的杆臂解决方案
精确的杆臂测量对于实现惯性导航系统(INS)的全部精度至关重要。无论您需要快速估算工作流程、全自动校准过程还是实时板载计算,SBG Systems 都提供一整套针对每种集成场景量身定制的工具。从独立的桌面工具到基于云的服务以及嵌入式实时算法,每种选项都确保您的 INS 提供最佳对准、减少安装误差和卓越的导航性能。探索最适合您的工作流程和平台架构的解决方案。
| SBG INS | SBG INS 所有 | SBG INS 所有 | SBG INS Ekinox、Apogee、Quanta 和 Navsight 系列 | SBG INS 所有 |
|---|---|---|---|---|
| 第三方 INS | 第三方 INS 否 | 第三方 INS 否 | 第三方 INS 否 | 第三方 INS 是 |
| 附加辅助传感器(例如里程计或 DVL) | 附加辅助传感器(例如里程计或 DVL) 是 | 附加辅助传感器(例如里程计或 DVL) 是 | 附加辅助传感器(例如里程计或 DVL) 否 | 附加辅助传感器(例如里程计或 DVL) 是 |
| 许可证 | 许可证 测试期间免费 | 许可证 免费使用 | 许可证 包含在产品购买中 | 许可证 包含在 Qinertia 许可证中 |
| 访问 | 访问 网页浏览器,通过 MySBG 账户登录访问 | 访问 独立应用程序,通过 MySBG 账户登录访问 | 访问 INS 接口,直接通过 HPI 网络界面访问 | 访问 桌面软件,使用有效许可证激活 |



