Lever Arm Automate INS–GNSS lever arm calibration
When installing an Inertial Navigation System (INS), configuration of the lever arms between the INS and the GNSS antennas, and between the INS and additional sensors such as Odometer or DVL is a real challenge.
To simplify this operation and advance both efficiency and accuracy, we offer multiple Lever Arm solutions, designed to re-estimate the lever arm automatically. They eliminate the need for careful manual measurement, allowing SBG systems’ users to install their IMU with a rough estimate and refine it later with the tool.
Try it now!
Lever Arm estimation tool for reliable sensor fusion
SBG Systems offers a comprehensive suite of lever arm estimation tools to meet all operational needs. The embedded tool, available in integrated into the interface of our HPIs (high performance inertial systems), provides real-time estimation of both primary and secondary lever arms, surpassing competitors that only support dual-antenna alignment. The Qinertia Lever Arm tool is a free standalone solution using the Qinertia engine in loose-coupling mode, requiring RTK-acquired data. All you need is an internet connection to log in to MySBG.
The Qinertia Cloud lever arm tool enables quick, browser-based lever arm estimation with a simple drag-and-drop workflow, ideal for flexible field calibration, also relying on RTK data without GNSS corrections. For maximum accuracy, the Qinertia PPK software leverages GNSS corrections to deliver survey-grade precision, though a license is required. Together, these four solutions ensure precise lever arm calibration for all users, enhancing sensor fusion reliability and guaranteeing consistent, high-performance navigation across platforms and environments.




What is a lever arm?
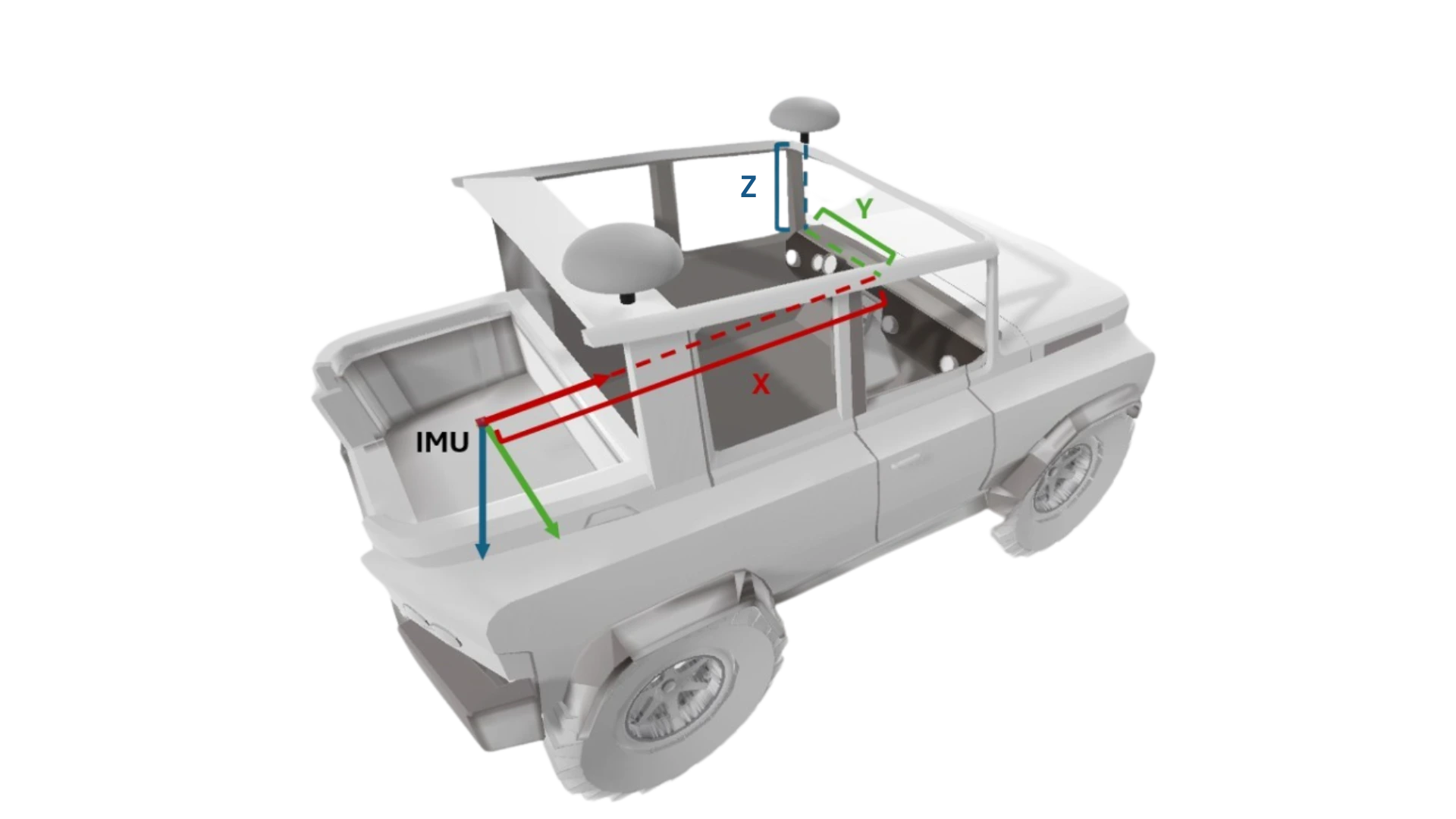
The Lever Arm is the positional offset of the GNSS antenna or other reference points on the platform with respect to the INS reference point, usually expressed as a 3D vector (X, Y, Z). This is critical in GNSS/INS fusion because GNSS provides the position of the antenna, while the attitude information computed by the INS is referenced within the sensor itself, which is installed at a different location.
This offset, between the location of the antennas and the location of the INS means these points experience different dynamics during motion.
Even small errors in lever arm measurement can introduce significant positioning inaccuracies. Traditionally, this requires careful manual measurement, it comes with several challenges in practice:
– Human error: small misalignments in measurements can lead to cumulative errors in positioning calculations.
– Difficult access to mounting points: the IMU and GNSS antenna may be mounted in hard-to-reach locations, making precise measurement difficult.
– Time-consuming process: Ensuring high accuracy requires multiple checks and validations, adding extra time to the installation process.
The complete lever arm ecosystem
Cloud lever arm
The Qinertia Cloud introduces a dedicated lever arm estimation service accessible entirely through a web browser, with no installation and a workflow as simple as drag-and-drop data upload. Like the standalone tool, it should also be used with RTK-enabled acquisitions.
The service is currently released in beta, is fully free to try without a desktop installation. The service can already be explored through the Qinertia Cloud platform.
Standalone lever arm
The standalone lever arm estimation tool is delivered within the Qinertia installation package but operates independently, providing lever arm estimation without requiring a Qinertia license.
This tool supports only SBG INS products and can also estimate the lever arm of additional aiding sensors such as odometer and DVL when they are available. It uses the same processing engine as the full Qinertia software but operates in loose-coupling mode only, as such, it should be used with acquisitions recorded using RTK to ensure optimal results. It is accessed by installing the Qinertia desktop software and logging in with a MySBG account, and it is available free of charge. The tool provides a convenient workflow for users who want accurate calibration without requiring a Qinertia license.
Embedded lever arm
The embedded lever arm estimation tool is integrated directly within SBG’s Ekinox, Apogee, Quanta and Navsight product range and delivers real-time calibration without the need for external software.
It is capable of estimating both the primary and secondary lever arms. Users access this functionality through the web interface of their HPI INS device, and the feature is included at no additional cost.
This makes it a powerful solution for users needing immediate, on-device calibration and continuous performance feedback.
Qinertia PPK software lever arm
Within the Qinertia PPK software, users have access to the most accurate lever arm estimation capability available. By injecting GNSS corrections and performing full post-processed fusion, this tool delivers survey-grade precision and represents the premium solution for demanding applications. Access requires a valid Qinertia license, but it supports the widest range of data and offers the strongest estimation performance when maximum accuracy is required.




Choose your lever arm solution
Accurate lever arm determination is essential for achieving the full precision of your inertial navigation system. Whether you need a fast estimation workflow, a fully automated calibration process, or real-time onboard computation, SBG Systems provides a complete suite of tools tailored to every integration scenario. From standalone desktop utilities to cloud-based services and embedded real-time algorithms, each option ensures your INS delivers optimal alignment, reduced installation errors, and superior navigation performance. Explore the solution that best fits your workflow and platform architecture.
| SBG INS | SBG INS All | SBG INS All | SBG INS Ekinox, Apogee, Quanta and Navsight series | SBG INS All |
|---|---|---|---|---|
| Third party INS | Third party INS No | Third party INS No | Third party INS No | Third party INS Yes |
| Additional aiding sensors (such as Odometer or DVL) | Additional aiding sensors (such as Odometer or DVL) Yes | Additional aiding sensors (such as Odometer or DVL) Yes | Additional aiding sensors (such as Odometer or DVL) No | Additional aiding sensors (such as Odometer or DVL) Yes |
| License | License Free during the beta period | License Free to use | License Included in product purchase | License Included in Qinertia License |
| Access | Access Web browser, accessed by logging in with a MySBG account | Access Standalone app, accessed by logging in with a MySBG account | Access INS interface, accessed directely through the HPI web interface | Access Desktop software, activated using a valid license |



