

航空摄影测量
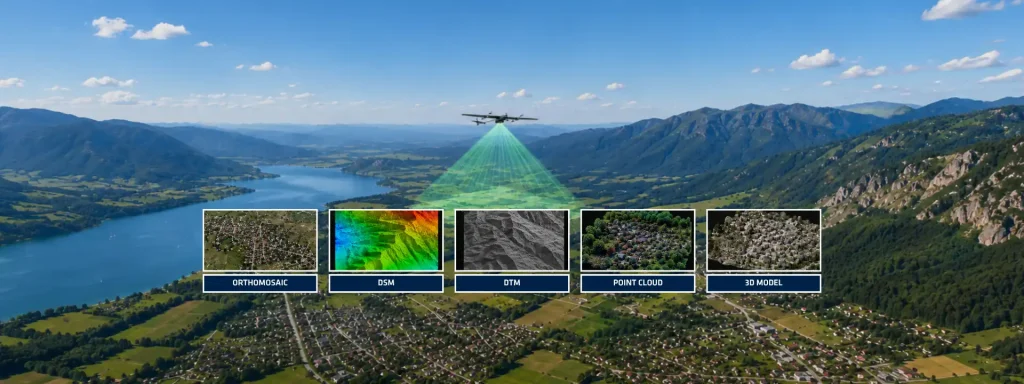
航空摄影测量已从一种纯粹基于图像的测绘技术,发展成为一种高度集成的地理空间工作流程,融合了光学传感器、全球导航卫星系统(GNSS)和惯性导航技术。现代摄影测量任务不再仅依赖地面控制点(GCP)来获得测绘级别的成果。 取而代之的是,先进的直接地理参考方法利用紧密GNSS 测量GNSS ,为每张拍摄的图像提供高精度的定位和姿态信息。从本质上讲,航空摄影测量将重叠的航空影像转化为可测量的地理空间产品,例如正射镶嵌图、数字表面模型(DSM)、数字高程模型(DTM)、点云以及三维重建。 与主要侧重于视觉呈现的航空摄影不同,摄影测量通过几何重建和图像配准算法,从影像中提取定量的空间信息。
摄影测量工作流程始于任务规划。操作员根据项目要求设定飞行高度、重叠率、地面采样距离(GSD)以及相机触发间隔。典型的测绘任务通常将纵向重叠率设定在75%以上,横向重叠率设定在60%以上,以确保在束调整和密集重建过程中具有足够的冗余度。
数据采集是接下来的关键阶段。飞行过程中,载荷记录图像帧,同时导航子系统持续估算平台轨迹。该导航解决方案GNSS 与惯性测量数据相结合,后者根据任务要求来自IMU、AHRS、INS运动参考系统。
惯性传感器在航空摄影测量中的重要性
在直接地理配准过程中,惯性技术发挥着决定性作用。每幅图像都需要精确的外定向参数(EOP):位置(X、Y、Z)和姿态(横滚、俯仰、偏航)。传统工作流程通过基于大量地面控制点(GCP)部署的航空三角测量来估算这些参数。 现代系统通过GNSS 惯性导航相结合,降低了对后者的依赖。
GNSS 绝对定位,而惯性子系统则在GNSS 之间提供高采样率的姿态和运动信息。这种融合技术可补偿卫星信号的暂时性衰减,提高轨迹平滑度,并确保整个飞行过程中持续进行姿态估计。 相机快门触发事件与导航数据之间的精确时间同步依然至关重要,因为毫秒级的时间偏差会直接导致地理位置误差。
后处理进一步提升了性能。后处理动态定位(PPK)工作流程在数据采集后GNSS 进行优化,以实现厘米级定位精度。PPK不再仅依赖实时校正,而是利用参考站或高精度校正服务对观测数据进行重新处理,从而减少大气、轨道和多径效应的影响。先进的INS 平台能够将图像触发事件与校正后的轨迹关联起来,并自动使用精确的位置和完整的姿态信息更新图像元数据。这种方法在显著提高航空测绘精度的同时,也简化了野外作业流程。
惯性导航如何改变航空测绘
对于从事无人机或混合型空中平台工作的专业人员而言,集成惯性导航系统能带来显著的作业优势。减少对地面控制点(GCP)的依赖,既能降低实地作业工作量,又能加快在偏远地区的部署速度,并提高大规模测绘的可重复性。此外,高精度惯性传感器可在剧烈机动、GNSS 暂时GNSS 或动态飞行条件下保持轨迹连续性。
传感器质量直接影响最终交付成果。偏移稳定性、角随机游走、抗振动能力、同步延迟以及校准质量都会影响姿态精度。即便是先进的重建算法,也无法弥补轨迹估计的偏差。轨迹误差会导致几何畸变、高程不准确以及点云不一致。 航空摄影测量技术正在多个行业持续扩展,包括走廊测绘、采矿、精准农业、基础设施检测以及数字孪生生成。
光学传感器与GNSS惯性技术的集成依然至关重要。这种融合能够提供可扩展、可重复且达到测绘级别的地理空间情报。航空测绘的未来不再以图像为中心,而是由导航驱动。
