

Аерофотограмметрія
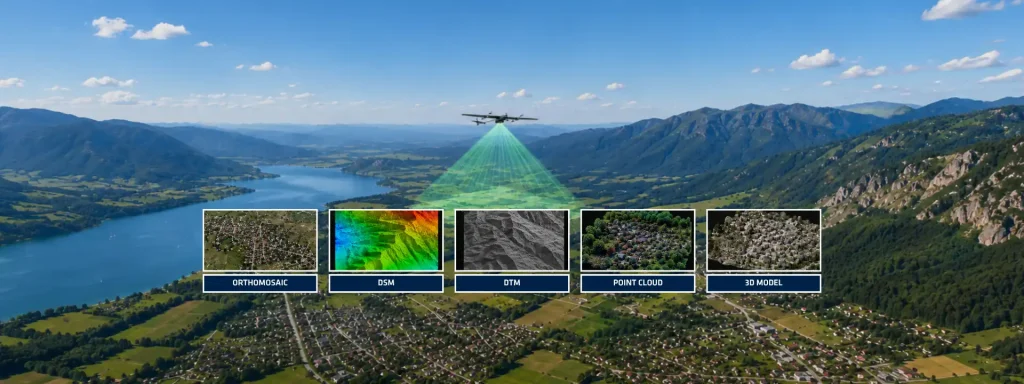
Аерофотограмметрія еволюціонувала від суто зображувальної техніки картографування до високоінтегрованого геопросторового робочого процесу, що поєднує оптичні датчики, глобальні навігаційні супутникові системи (GNSS) та технології інерційної навігації. Сучасні фотограмметричні місії більше не покладаються виключно на наземні контрольні точки (GCP) для отримання результатів геодезичної якості. Натомість передові методи прямого геореферування використовують тісно синхронізовані вимірювання GNSS інерційних систем, щоб забезпечити високу точність позиціонування та орієнтації кожного знятого зображення. По суті, аерофотограмметрія перетворює перекриваючі аерофотознімки на вимірювані геопросторові продукти, такі як ортомозаїки, цифрові моделі поверхні (DSM), цифрові моделі рельєфу (DTM), хмари точок та тривимірні реконструкції. На відміну від аерофотозйомки, яка зосереджується переважно на візуальному зображенні, фотограмметрія витягує кількісну просторову інформацію зі знімків за допомогою алгоритмів геометричної реконструкції та зіставлення зображень.
Фотограмметричний робочий процес починається з планування місії. Оператори визначають висоту польоту, коефіцієнти перекриття, відстань дискретизації на місцевості (GSD) та інтервали спрацьовування камери відповідно до вимог проєкту. Типові картографічні місії передбачають поздовжнє перекриття понад 75 % та поперечне перекриття понад 60 %, щоб забезпечити достатню надмірність під час коригування пучків та щільної реконструкції.
Збір даних є наступним критично важливим етапом. Під час польоту корисне навантаження записує кадри зображень, тоді як навігаційна підсистема безперервно обчислює траєкторію платформи. Це навігаційне рішення інтегрує GNSS з інерційними вимірами, зібраними з IMU, AHRS, INS або систем відліку руху, залежно від вимог місії.
Значення інерційних датчиків у повітряній фотограмметрії
Роль інерційної технології стає вирішальною під час прямого геоприв'язування. Кожне зображення потребує точних параметрів зовнішнього орієнтування (EOP): положення (X, Y, Z) та орієнтації (roll, pitch, yaw). Традиційні робочі процеси оцінюють ці параметри за допомогою аерофототріангуляції, що підтримується широким розгортанням GCP. Сучасні системи зменшують цю залежність шляхом поєднання GNSS з інерційною навігацією.
GNSS забезпечує абсолютне позиціонування, тоді як інерційна підсистема надає високошвидкісну інформацію про орієнтацію та рух між оновленнями GNSS. Це поєднання компенсує тимчасову деградацію супутників, покращує плавність траєкторії та забезпечує безперервне оцінювання орієнтації протягом усього польоту. Точна синхронізація часу між подіями затвора камери та навігаційними даними залишається важливою, оскільки мілісекундні зміщення часу безпосередньо призводять до помилок геолокації.
Постобробка додатково підвищує продуктивність. Робочі процеси постобробки кінематичних даних (PPK) уточнюють необроблені вимірювання GNSS після збору для досягнення сантиметрової точності позиціонування. Замість того, щоб покладатися виключно на корекції в реальному часі, PPK переобробляє спостереження з використанням референсних станцій або точних корекційних сервісів для зменшення атмосферних, орбітальних та багатопроменевих ефектів. Розширені платформи постобробки GNSS/INS можуть асоціювати події спрацьовування камери зі скоригованими траєкторіями та автоматично оновлювати метадані зображень уточненими положеннями та повною інформацією про орієнтацію. Цей підхід значно покращує точність аерофотозйомки, одночасно спрощуючи польові операції.
Як інерційна навігація змінює аерофотозйомку
Для фахівців, які працюють з БПЛА або гібридними повітряними платформами, інтеграція інерційної навігації забезпечує відчутні оперативні переваги. Зменшення залежності від контрольних точок (GCP) скорочує обсяг польових робіт, прискорює розгортання в віддалених місцевостях та покращує відтворюваність результатів під час великомасштабних зйомок. Крім того, високоточні інерційні датчики забезпечують безперервність траєкторії під час різких маневрів, тимчасового GNSS або в умовах динамічного польоту.
Якість датчиків безпосередньо впливає на кінцеві результати. Стабільність зміщення, кутовий випадковий блукання, стійкість до вібрацій, затримка синхронізації та якість калібрування — все це впливає на точність орієнтації. Навіть найсучасніші алгоритми реконструкції не можуть компенсувати неточне визначення траєкторії. Похибки траєкторії призводять до геометричних спотворень, неточностей висоти та несумісних хмар точок. Аерофотограмметрія продовжує поширюватися в різних галузях. До них належать картографування коридорів, гірнича справа, точне землеробство, інспекція інфраструктури та створення цифрових двійників.
Інтеграція оптичних датчиків із GNSS та інерційними технологіями залишається надзвичайно важливою. Така конвергенція забезпечує масштабовану, відтворювану та геопросторову інформацію геодезичної якості. Майбутнє аерофотозйомки більше не зосереджене на зображеннях — воно базується на навігації.
