

Fotogrametria lotnicza
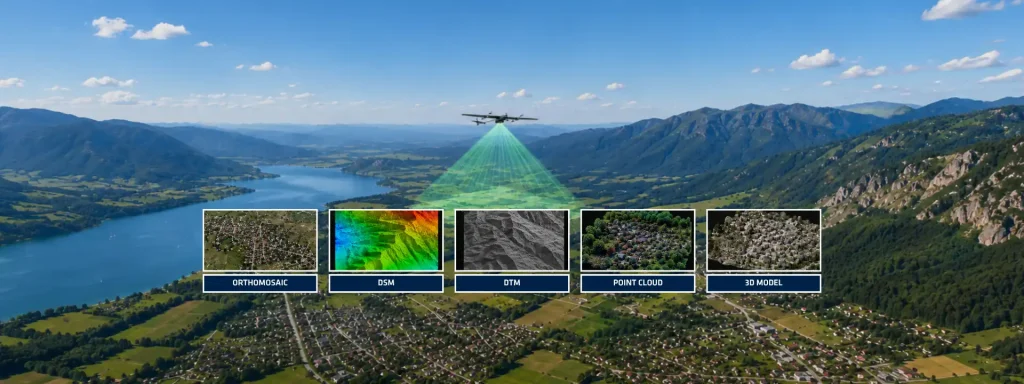
Fotogrametria lotnicza przekształciła się z techniki kartograficznej opartej wyłącznie na obrazach w wysoce zintegrowany proces geoprzestrzenny, łączący czujniki optyczne, globalne systemy nawigacji satelitarnej (GNSS) oraz technologie nawigacji inercyjnej. Współczesne misje fotogrametryczne nie opierają się już wyłącznie na naziemnych punktach kontrolnych (GCP) w celu uzyskania wyników o jakości geodezyjnej. Zamiast tego zaawansowane metody bezpośredniego georeferencjonowania wykorzystują ściśle zsynchronizowane pomiary GNSS inercyjne, aby zapewnić wysoką dokładność pozycjonowania i orientacji każdego zarejestrowanego obrazu. W swej istocie fotogrametria lotnicza przekształca nakładające się zdjęcia lotnicze w mierzalne produkty geoprzestrzenne, takie jak ortomosaiki, cyfrowe modele powierzchni (DSM), cyfrowe modele terenu (DTM), chmury punktów oraz rekonstrukcje trójwymiarowe. W odróżnieniu od fotografii lotniczej, która skupia się przede wszystkim na reprezentacji wizualnej, fotogrametria pozyskuje ilościowe informacje przestrzenne z obrazów za pomocą algorytmów rekonstrukcji geometrycznej i dopasowywania obrazów.
Proces fotogrametryczny rozpoczyna się od planowania misji. Operatorzy określają wysokość lotu, współczynniki nakładania się, odległość próbkowania naziemnego (GSD) oraz interwały wyzwalania aparatu zgodnie z wymaganiami projektu. Typowe misje mapowania zakładają nakładanie się wzdłużne powyżej 75% i nakładanie się poprzeczne powyżej 60%, aby zapewnić wystarczającą redundancję podczas dopasowania wiązki i gęstej rekonstrukcji.
Kolejnym kluczowym etapem jest pozyskiwanie danych. Podczas lotu ładunek rejestruje klatki obrazu, podczas gdy podsystem nawigacyjny na bieżąco szacuje trajektorię platformy. To rozwiązanie nawigacyjne integruje GNSS z pomiarami inercyjnymi zebranymi z IMU, AHRS, INS lub systemów odniesienia ruchu, w zależności od wymagań misji.
Znaczenie czujników inercyjnych w fotogrametrii lotniczej
Podczas bezpośredniego georeferencjonowania decydującą rolę odgrywa technologia inercyjna. Każdy obraz wymaga precyzyjnych parametrów orientacji zewnętrznej (EOP): położenia (X, Y, Z) oraz położenia przestrzennego (przechył, pochylenie, odchylenie). W tradycyjnych procesach parametry te szacuje się za pomocą triangulacji lotniczej, wspieranej przez rozległą sieć punktów kontrolnych (GCP). Nowoczesne systemy ograniczają tę zależność poprzez połączenie GNSS nawigacją inercyjną.
GNSS pozycjonowanie bezwzględne, natomiast podsystem inercyjny dostarcza informacje o położeniu i ruchu z dużą częstotliwością pomiędzy GNSS . Takie połączenie kompensuje chwilowe pogorszenie jakości sygnału satelitarnego, poprawia płynność trajektorii i zapewnia ciągłe szacowanie orientacji podczas całego lotu. Dokładna synchronizacja czasowa między momentami wyzwolenia migawki aparatu a danymi nawigacyjnymi pozostaje niezbędna, ponieważ przesunięcia czasowe rzędu milisekund bezpośrednio przekładają się na błędy geolokalizacji.
Przetwarzanie końcowe dodatkowo poprawia wydajność. Procesy oparte na kinematycznej obróbce końcowej (PPK) udoskonalają surowe GNSS po ich pozyskaniu, aby osiągnąć pozycjonowanie z dokładnością do centymetra. Zamiast polegać wyłącznie na korektach w czasie rzeczywistym, PPK ponownie przetwarza obserwacje w odniesieniu do stacji referencyjnych lub precyzyjnych usług korekcyjnych w celu zredukowania efektów atmosferycznych, orbitalnych i wielodrożności. Zaawansowane platformy INS potrafią powiązać zdarzenia wyzwalające wykonanie zdjęć ze skorygowanymi trajektoriami oraz automatycznie aktualizować metadane zdjęć o udoskonalone pozycje i kompletne informacje o orientacji. Takie podejście znacznie poprawia dokładność mapowania lotniczego, jednocześnie upraszczając operacje terenowe.
Jak nawigacja inercyjna zmienia sposób przeprowadzania pomiarów lotniczych
Dla specjalistów pracujących z bezzałogowymi statkami powietrznymi (UAV) lub hybrydowymi platformami powietrznymi wdrożenie nawigacji inercyjnej zapewnia wymierne korzyści operacyjne. Mniejsze uzależnienie od punktów kontrolnych (GCP) zmniejsza nakład pracy w terenie, przyspiesza wdrażanie w odległych lokalizacjach oraz poprawia powtarzalność wyników w pomiarach na dużą skalę. Ponadto wysokiej klasy czujniki inercyjne zapewniają ciągłość trajektorii podczas gwałtownych manewrów, chwilowego GNSS lub w dynamicznych warunkach lotu.
Jakość czujników ma bezpośredni wpływ na końcowe wyniki. Stabilność odchylenia, losowy ruch kątowy, odporność na wibracje, opóźnienie synchronizacji oraz jakość kalibracji – wszystkie te czynniki wpływają na dokładność orientacji. Nawet zaawansowane algorytmy rekonstrukcji nie są w stanie zrekompensować niedokładnego oszacowania trajektorii. Błędy trajektorii powodują zniekształcenia geometryczne, niedokładności wysokościowe oraz niespójne chmury punktów. Fotogrametria lotnicza nadal zyskuje na popularności w wielu branżach. Należą do nich mapowanie korytarzy, górnictwo, rolnictwo precyzyjne, inspekcja infrastruktury oraz tworzenie cyfrowych bliźniaków.
Integracja czujników optycznych z technologiami GNSS i inercyjnymi pozostaje niezbędna. Ta konwergencja umożliwia uzyskanie skalowalnych, powtarzalnych i o jakości geodezyjnej danych geoprzestrzennych. Przyszłość mapowania lotniczego nie koncentruje się już na obrazach — jest oparta na nawigacji.
