

Aerial photogrammetry
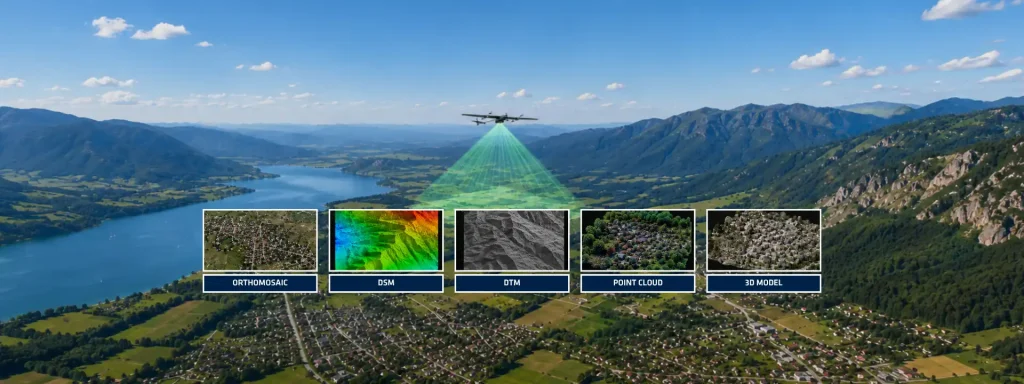
Aerial photogrammetry has evolved from a purely image-based mapping technique into a highly integrated geospatial workflow combining optical sensors, Global Navigation Satellite Systems (GNSS), and inertial navigation technologies. Modern photogrammetric missions no longer rely exclusively on ground control points (GCPs) to achieve survey-grade outputs. Instead, advanced direct georeferencing methods use tightly synchronized GNSS and inertial measurements to deliver high-accuracy positioning and orientation for every captured image. At its core, aerial photogrammetry transforms overlapping aerial imagery into measurable geospatial products such as orthomosaics, digital surface models (DSM), digital terrain models (DTM), point clouds, and three-dimensional reconstructions. Unlike aerial photography, which primarily focuses on visual representation, photogrammetry extracts quantitative spatial information from imagery through geometric reconstruction and image matching algorithms.
The photogrammetric workflow begins with mission planning. Operators define flight altitude, overlap ratios, ground sampling distance (GSD), and camera triggering intervals according to project requirements. Typical mapping missions target longitudinal overlap above 75% and lateral overlap above 60% to ensure sufficient redundancy during bundle adjustment and dense reconstruction.
Data acquisition constitutes the next critical stage. During flight, the payload records image frames while the navigation subsystem continuously estimates the platform trajectory. This navigation solution integrates GNSS observations with inertial measurements collected from IMUs, AHRS, INS, or motion reference systems depending on mission requirements.
Importance of inertial sensors in aerial photogrammetry
The role of inertial technology becomes decisive during direct georeferencing. Every image requires precise exterior orientation parameters (EOP): position (X, Y, Z) and attitude (roll, pitch, yaw). Conventional workflows estimate these parameters through aerial triangulation supported by extensive GCP deployment. Modern systems reduce this dependency by coupling GNSS with inertial navigation.
GNSS provides absolute positioning, while the inertial subsystem supplies high-rate attitude and motion information between GNSS updates. This fusion compensates for temporary satellite degradation, improves trajectory smoothness, and ensures continuous orientation estimation throughout the flight. Accurate time synchronization between camera shutter events and navigation data remains essential because millisecond timing offsets directly translate into geolocation errors.
Post-processing further enhances performance. Post-Processed Kinematic (PPK) workflows refine raw GNSS measurements after acquisition to achieve centimeter-level positioning. Instead of relying solely on real-time corrections, PPK reprocesses observations against reference stations or precise correction services to reduce atmospheric, orbital, and multipath effects. Advanced GNSS/INS post-processing platforms can associate image trigger events with corrected trajectories and automatically update image metadata with refined positions and complete orientation information. This approach significantly improves aerial mapping accuracy while simplifying field operations.
How inertial navigation transforms aerial surveys
For professionals working with UAVs or hybrid airborne platforms, integrating inertial navigation creates measurable operational advantages. Reduced GCP dependency decreases field labor, accelerates deployment in remote environments, and improves repeatability across large-scale surveys. Furthermore, high-grade inertial sensors maintain trajectory continuity during aggressive maneuvers, temporary GNSS masking, or dynamic flight conditions.
Sensor quality directly influences final deliverables. Bias stability, angular random walk, vibration robustness, synchronization latency, and calibration quality all impact orientation accuracy. Even advanced reconstruction algorithms cannot compensate for poor trajectory estimation. Trajectory errors create geometric distortions, elevation inaccuracies, and inconsistent point clouds. Aerial photogrammetry continues to expand across multiple industries. These include corridor mapping, mining, precision agriculture, infrastructure inspection, and digital twin generation.
The integration of optical sensors with GNSS and inertial technologies remains essential. This convergence enables scalable, repeatable, and survey-grade geospatial intelligence. The future of airborne mapping is no longer image-centric—it is navigation-driven.
