PingDSP 将 Ekinox INS 集成到其声呐中
该公司选择了 SBG Systems 惯性传感器,用于运动补偿和 GNSS 信号中断补偿。
“新集成的 Ekinox-E 在 GNSS 辅助套件中提供精确的声呐姿态、航向和升沉信息。” | PingDSP
关于 PingDSP 声纳的一切
iDX 的推出再次确立了 PingDSP 作为浅水水文和成像声纳技术的领先创新者和开发商的地位。
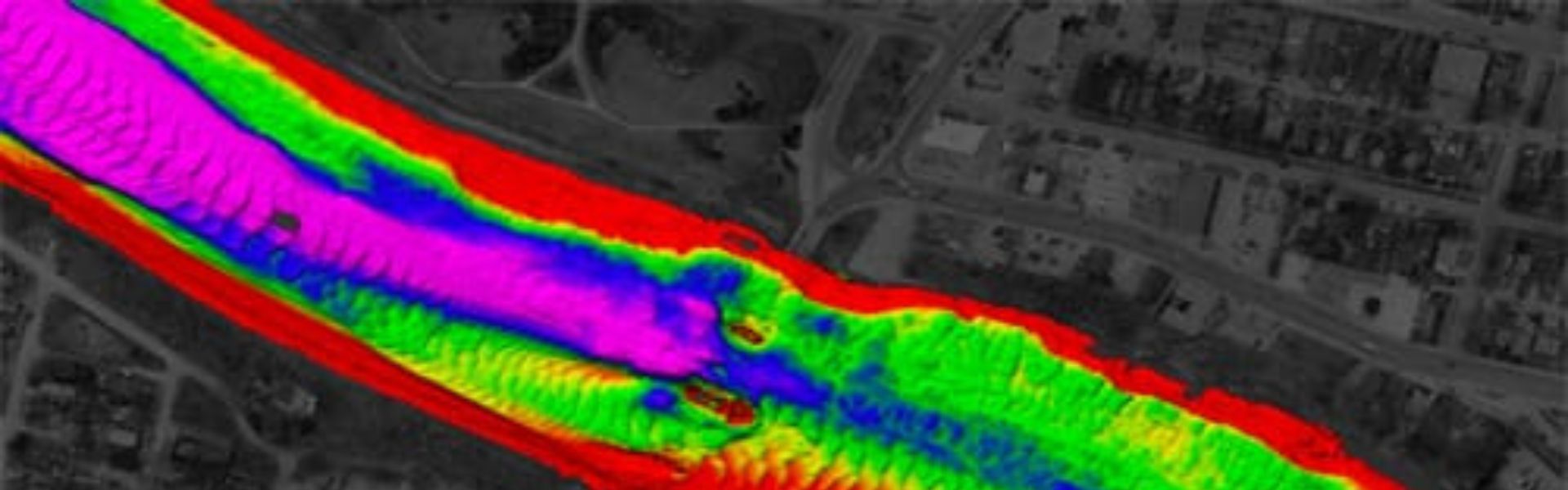
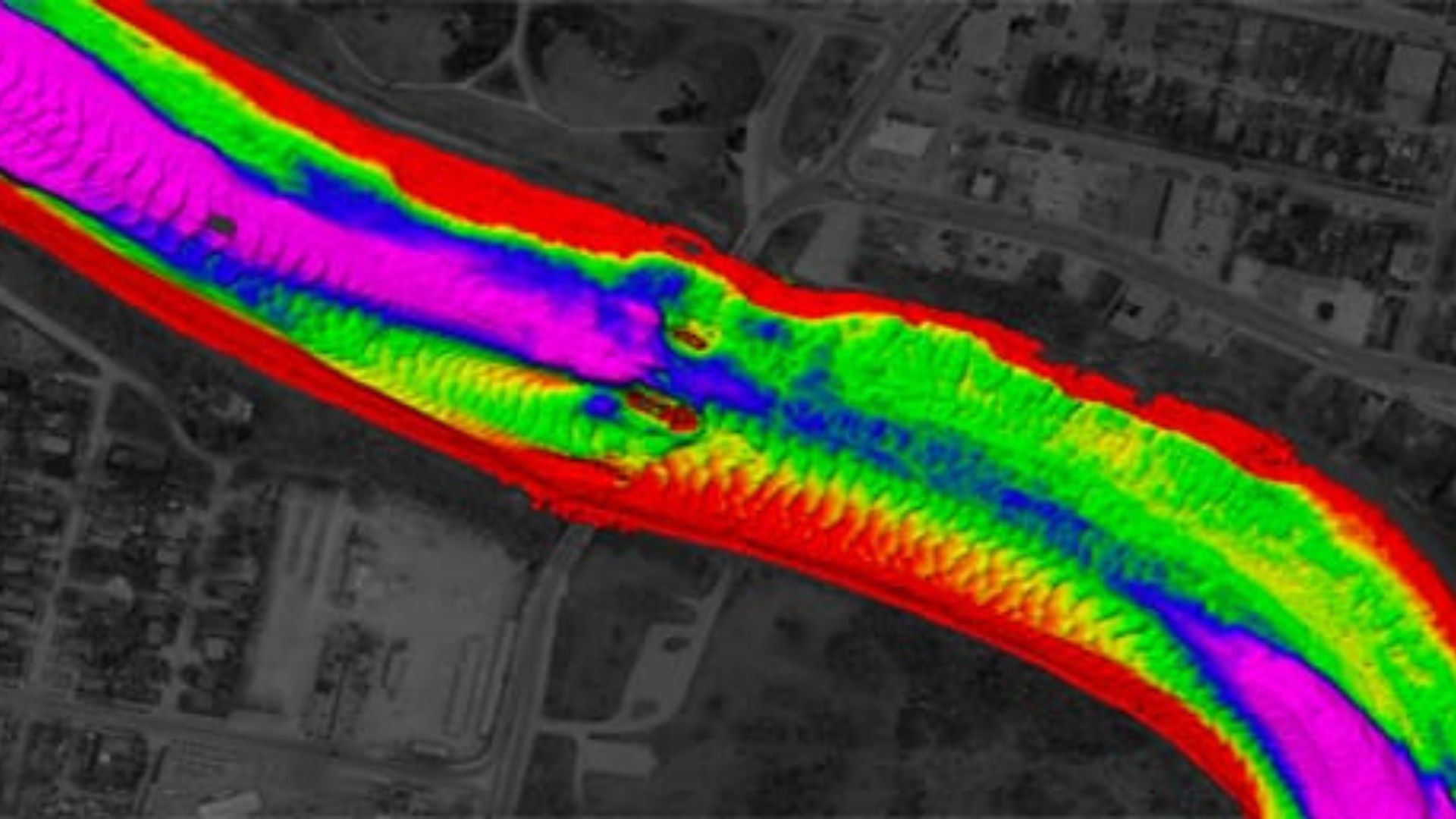
3DSS-iDX 引入了一种创新的信号处理技术,通过管理多个同时到达的后向散射信号(包括来自海床、海面、水体和多径的信号)来增强传统的干涉系统。
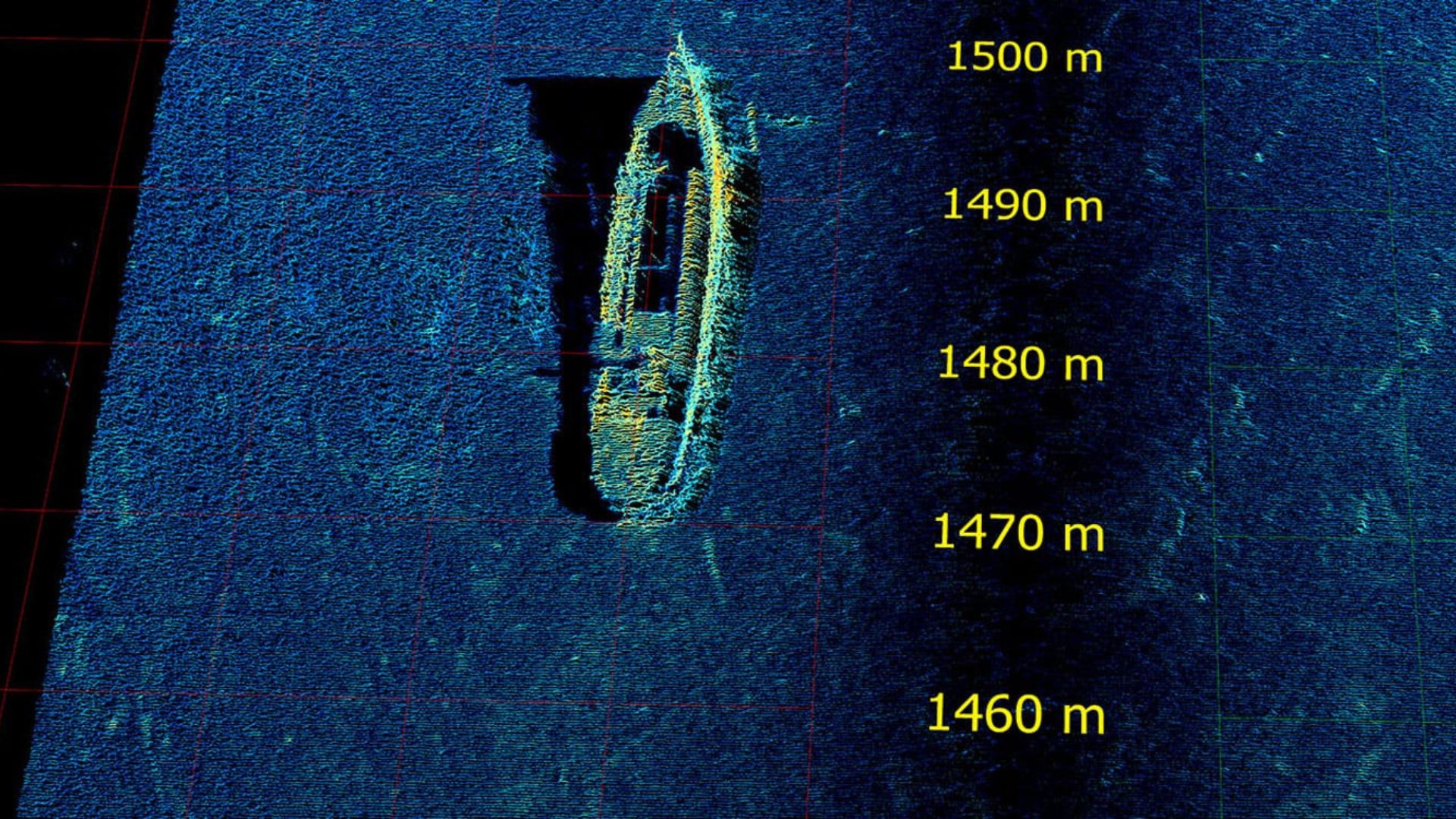
这种先进的方法可提供出色的宽幅测深和真正的 3D 侧扫成像,所有这些都封装在一个紧凑且用户友好的声纳系统中。

“性能、多功能性和简单性,这就是浅水海道测量员想要的,而这正是 3DSS‐iDX 的全部意义所在”,PingDSP 的创始人兼 CEO Paul Kraeutner 博士说。
集成式 Ekinox-E
新集成的 Ekinox-E 在 GNSS 辅助套件中提供精确的声呐姿态、航向和升沉信息。而最近推出的 AML MicroX SVT 探头可在换能器表面提供精确的声速,以实现无缝的实时角度校正。
无缝集成
PingDSP 工程团队与 SBG Systems 和 AML Oceanographic 密切合作,将水文等级外围设备无缝集成到 iDX 声纳头中,从而大大降低了安装和操作的复杂性。
Ekinox-E
Ekinox-E 还可以从外部 GNSS 接收器接收辅助数据以提供导航。
Ekinox-E 旨在连接多达 4 个外部辅助系统,包括 DVL 或 DMI。这种高度通用的惯性导航系统提供姿态、升沉和导航数据。

询价 Ekinox-E
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是水深测量?
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与创建精确定位的海底 3D 测深表示相关联。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
USV 的惯性导航系统是什么?
用于无人水面艇 (USV) 的惯性制导系统对于精确导航和控制至关重要,尤其是在 GNSS 不可用时。惯性传感器跟踪运动和方向,从而在具有挑战性的环境中实现有效的导航。
惯性导航系统 (INS) 将 IMU 数据与其他系统(如 GNSS 或多普勒计程仪)集成,以提高精度。它们还采用导航算法,例如卡尔曼滤波,来计算位置和速度。
惯性传感器支持自主运行,为各种应用提供精确的航向精度和位置数据。它们确保在 GNSS 受限条件下有效运行,并允许进行实时调整以增强机动性。
什么是多波束回声测深?
什么是水文测量?
水文测量是测量和绘制水体(包括海洋、河流、湖泊和沿海地区)物理特征的过程。它涉及收集与海底的深度、形状和轮廓(海底测绘)以及水下物体、导航危险和其他水下特征(例如水槽)的位置相关的数据。水文测量对于各种应用至关重要,包括导航安全、海岸管理和沿海测量、建筑和环境监测。
水文测量 涉及几个关键组成部分,首先是测深,它使用声纳系统(如单波束或多波束回声测深仪)测量水深和海底地形,这些系统向海底发送声脉冲并测量回声的返回时间。
精确定位至关重要,它通过使用全球导航卫星系统 (GNSS) 和惯性导航系统 (INS) 将深度测量链接到精确的地理坐标来实现。此外,还会测量水柱数据(如温度、盐度和水流),并收集地球物理数据,以使用侧扫声纳和磁力计等工具检测水下物体、障碍物或危险。
