PingDSPはソナー用にEkinox INSを統合
同社は、モーション補正およびGNSS停止補正にSBG Systemsの慣性センサーを選択しました。
“新しく統合されたEkinox-Eは、GNSS支援パッケージで正確なソナー姿勢、方位、およびヒーブ情報を提供します。” | PingDSP
PingDSPのソナーについて
iDXの導入により、PingDSPは浅水域のハイドログラフィーおよびイメージング用ソナー技術のリーディングイノベーターおよびデベロッパーとしての地位を再確立します。
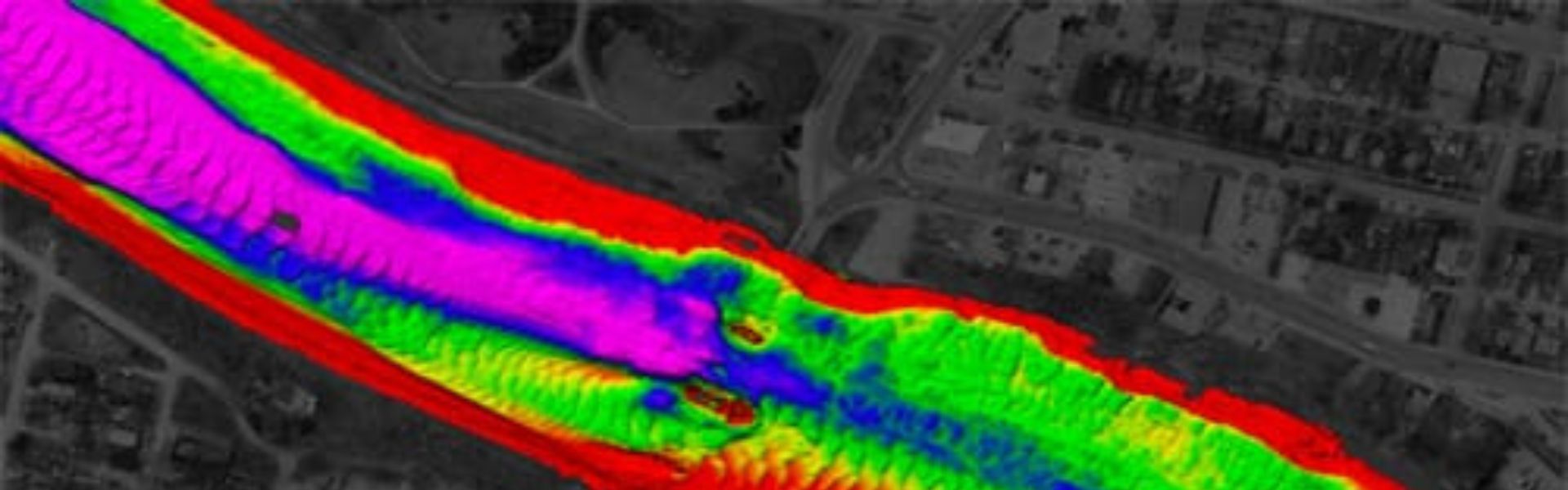
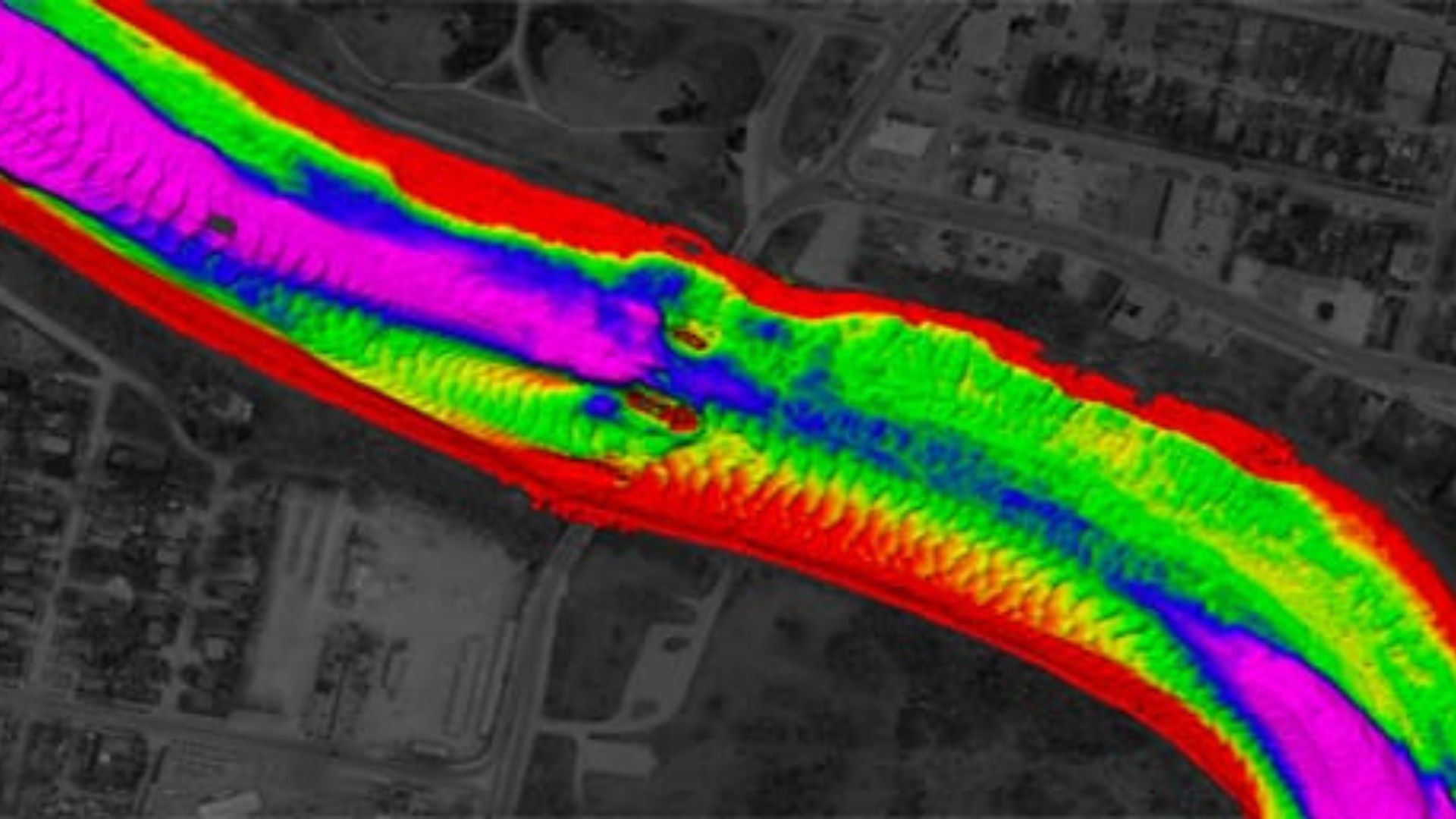
3DSS-iDXは、海底、海面、水柱、マルチパスからの信号を含む、複数の同時バックscatterの到達を管理することにより、従来の干渉計システムを強化する革新的な信号処理技術を導入します。
この高度なアプローチは、卓越した広幅の測深と真の3Dサイドスキャンイメージングを提供し、すべてがコンパクトでユーザーフレンドリーなソナーシステムにパッケージ化されています。

PingDSPの創業者兼CEOであるポール・クラウトナー博士は、“浅水域の測量担当者が求めているのは、性能、汎用性、そしてシンプルさです。3DSS‐iDXは、まさにそれを実現する製品です”と述べています。
統合されたEkinox-E
新しく統合されたEkinox-Eは、GNSS支援パッケージで正確なソナー姿勢、方位、およびヒーブ情報を提供します。一方、最近発表されたAML MicroX SVTプローブは、シームレスなリアルタイム角度補正のために、トランスデューサー面で正確な音速を提供します。
シームレスな統合
PingDSPのエンジニアリングチームは、SBG SystemsおよびAML Oceanographicと緊密に連携し、水路測量グレードの周辺機器をiDXソナーヘッドにシームレスに統合することで、設置と運用の複雑さを大幅に軽減しました。
Ekinox-E
Ekinox、外部GNSS からの補助データも取り込み、航法情報を提供します。
Ekinox、DVL を含む最大4つの外部補助システムを接続できるように設計されています。この汎用性の高い慣性航法システムは、姿勢、上下動、および航法データを提供します。

Ekinox-Eの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
水深測量とは?
水深測量とは、水中の地形の深度と形状の調査および測定であり、主に海底およびその他の水没した地形のマッピングに焦点を当てています。これは地形の水中版であり、海洋、海、湖、川の水中の特徴に関する詳細な洞察を提供します。水深測量は、航行、海洋建設、資源探査、環境研究など、さまざまなアプリケーションで重要な役割を果たします。
最新の深浅測量技術は、シングルビームやマルチビーム音響測深機などのソナーシステムを利用しており、音波を使用して水深を測定します。これらの装置は、海底に向けて音のPulseを発信し、エコーが戻ってくるまでの時間を記録し、水中での音速に基づいて深度を計算します。特にマルチビーム音響測深機は、一度に広い範囲の海底をマッピングできるため、非常に詳細で正確な海底の表現が可能です。多くの場合、正確な位置情報を持つ3D海底地形図を作成するために、RTK + INSソリューションが使用されます。
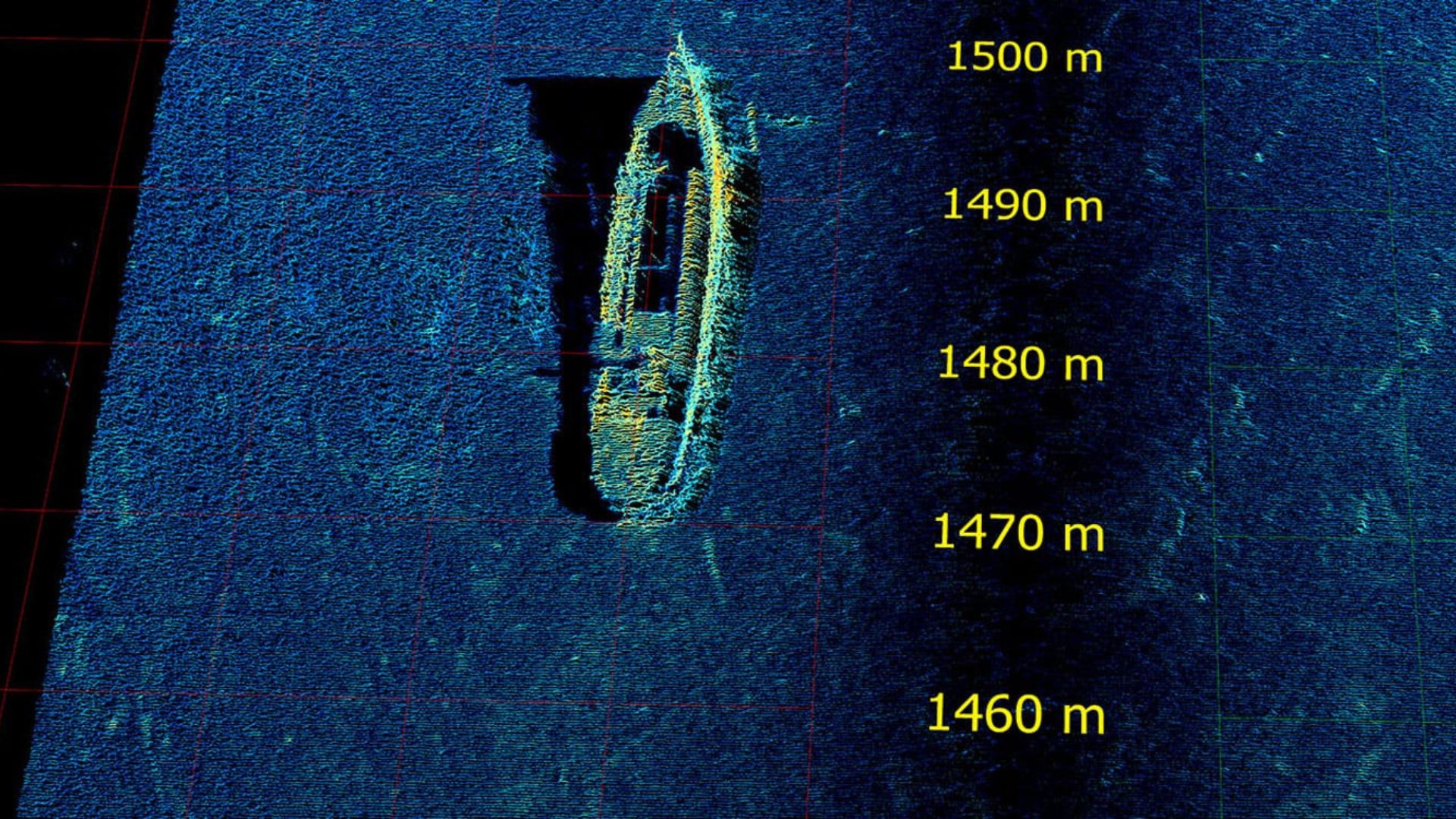
水深データは、水没した岩、難破船、砂州などの潜在的な水中の危険を特定することにより、船舶の安全な航行を支援する航海図を作成するために不可欠です。また、科学研究においても重要な役割を果たし、研究者が水中の地質学的特徴、海流、海洋生態系を理解するのに役立ちます。
USVの慣性航法システムとは?
無人水上艇(USV)用の慣性誘導システムは、特にGNSSが利用できない場合に、正確なナビゲーションと制御に不可欠です。慣性センサーは、モーションと姿勢を追跡し、困難な環境での効果的なナビゲーションを可能にします。
慣性航法システム(INS)は、精度を高めるために、IMUデータをGNSSやドップラー速度ログなどの他のシステムと統合します。また、カルマンフィルタリングなどのナビゲーションアルゴリズムを使用して、位置と速度を計算します。
慣性センサーは自律運転をサポートし、さまざまなアプリケーションに正確なヘディングと位置データを提供します。GNSSが利用できない状況での効果的な動作を保証し、操作性を向上させるためにリアルタイムで調整できます。
マルチビーム音響測深とは?
マルチビーム音響測深(MBES)は、海底や水中の地形を高精度でマッピングするために使用される高度な水路測量技術です。
従来のシングルビーム音響測深機は、船の真下の一点で水深を測定するのに対し、MBESは複数のソナービームを使用し、海底の広い範囲で同時に水深を測定します。これにより、地形、地質学的特徴、潜在的な危険箇所など、水中の地形を詳細かつ高解像度でマッピングできます。
MBESシステムは、水中を伝播する音波を発信し、海底で反射して船体に戻る音波を利用します。エコーが戻るまでの時間を分析することで、システムは複数のポイントで水深を計算し、水中の地形を詳細な地図として作成します。
この技術は、航行、海洋建設、環境モニタリング、資源探査など、さまざまなアプリケーションに不可欠であり、安全な海上運用と海洋資源の持続可能な管理のための重要なデータを提供します。
水路測量とは?
水路測量とは、海洋、河川、湖沼、沿岸地域などの水域の物理的特徴を計測し、マッピングするプロセスです。水深、海底の形状と輪郭(海底マッピング)、水没物体の位置、航行上の危険物、その他の水中構造物(水溝など)に関するデータを収集します。水路測量は、航行の安全、沿岸管理および沿岸サーベイ、建設、環境モニタリングなど、さまざまな用途にとって非常に重要です。
水路測量には、いくつかの重要なコンポーネントが含まれます。まず、水深を測定し、海底地形を測定する測深です。測深には、シングルビームまたはマルチビーム音響測深機などのソナーシステムを使用します。これらのシステムは、音響パルスを海底に送信し、エコーの戻り時間を測定します。
正確な位置特定は非常に重要であり、全地球航法衛星システム(GNSS)と慣性航法システム(INS)を使用して深度測定を正確な地理座標にリンクさせることで実現されます。さらに、水温、塩分、海流などの水柱データが測定され、サイドスキャンソナーや磁力計などのツールを使用して、水中の物体、障害物、または危険物を検出するために地球物理学的データが収集されます。
