


IMU – Inercyjna Jednostka Pomiarowa
Inercyjne jednostki pomiarowe (IMU) są podstawowymi elementami współczesnych systemów nawigacji i śledzenia ruchu.
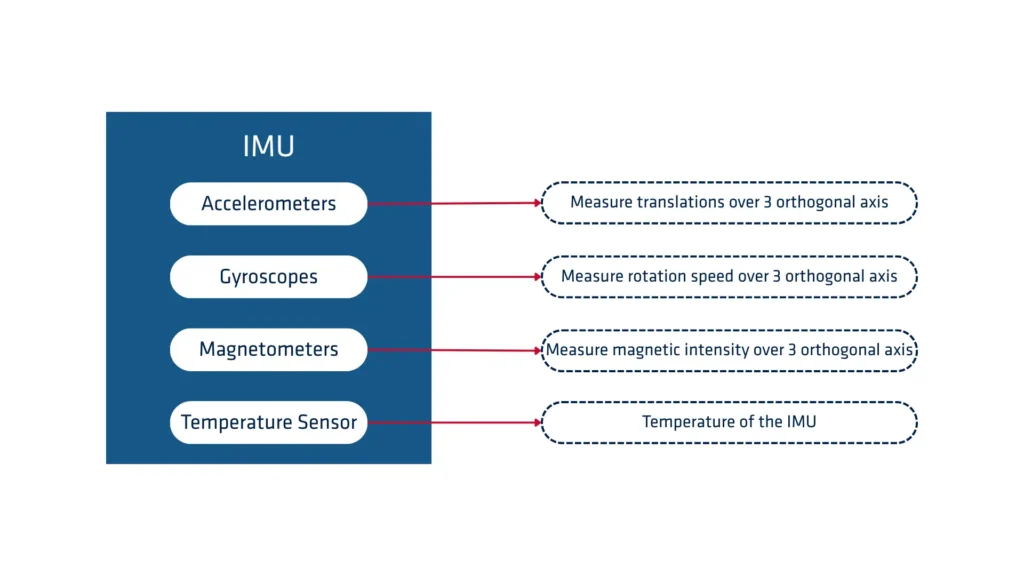
Inercyjna jednostka pomiarowa (IMU) to urządzenie elektroniczne, które mierzy i raportuje siłę właściwą ciała, prędkość kątową, a czasami pole magnetyczne otaczające ciało, wykorzystując kombinację akcelerometrów, żyroskopów, a czasami magnetometrów.
IMU mają kluczowe znaczenie dla śledzenia i kontrolowania pozycji i orientacji różnych obiektów, od samolotów i statków po smartfony i kontrolery do gier.
Istnieją różne typy czujników IMU: oparte na FOG (żyroskop światłowodowy), IMU RLG (żyroskop laserowy pierścieniowy) i wreszcie IMU oparte na technologii MEMS (Micro Electro-Mechanical Systems). Technologia ta pozwala na obniżenie kosztów i niskie zapotrzebowanie na energię, zapewniając jednocześnie wydajność. Systemy oparte na MEMS łączą zatem wysoką wydajność i bardzo niskie zużycie energii w mniejszej jednostce.
System generuje surowe dane z częstotliwością 1 kHz dla wymagających aplikacji czasu rzeczywistego.
Jak wybrać najlepszy IMU?
Wybierając najlepszy IMU do swoich potrzeb, należy wziąć pod uwagę kilka czynników, aby zapewnić wysoką dokładność, niezawodność i wydajność. Pierwszym czynnikiem jest dokładność czujnika, która bezpośrednio wpływa na precyzję pomiarów.
Wysokiej jakości IMU charakteryzują się niskim odchyleniem, dryftem i szumem, co zapewnia, że dostarczane przez nie dane są dokładne i stabilne w czasie. Kalibracja jest również kluczowa, ponieważ dobrze skalibrowane czujniki minimalizują kumulację błędów, szczególnie w dynamicznych środowiskach.
Zakres i rozdzielczość czujników IMU są również ważne. W zależności od zastosowania możesz potrzebować IMU o szerokim zakresie dynamicznym, aby radzić sobie w ekstremalnych warunkach, lub takiego o wysokiej rozdzielczości do precyzyjnych pomiarów w mniejszych ruchach.
Pobór mocy jest kolejnym krytycznym czynnikiem, szczególnie w systemach zasilanych bateryjnie, takich jak drony i pojazdy autonomiczne. IMU o niskim poborze mocy wydłuża czas pracy i zmniejsza koszty energii, czyniąc go bardziej wydajnym w przypadku misji długotrwałych.
Trwałość jest niezbędna. IMU zaprojektowane do trudnych warunków, takie jak te stosowane w obronności lub lotnictwie, muszą być wystarczająco wytrzymałe, aby wytrzymać wahania temperatury, wibracje i wstrząsy. Dodatkowo, należy wziąć pod uwagę obudowę i kompatybilność integracji.
Mniejsze, lżejsze IMU najlepiej sprawdzają się w urządzeniach przenośnych lub systemach bezzałogowych, podczas gdy większe systemy są wymagane w bardziej wymagających zastosowaniach.
Wreszcie, wybór zaufanego producenta z udokumentowanym doświadczeniem w dostarczaniu wysokowydajnych IMU zapewnia otrzymanie niezawodnego produktu, który spełnia Twoje potrzeby w zakresie precyzyjnego i dokładnego śledzenia ruchu.
