
日常的なシナリオでは、スタンドアロンの全地球航法衛星システム(GNSS)の精度で十分ですが、多くのアプリケーションではより高い精度が求められます。GNSSの精度を1cm以内に向上させるために、多くのディファレンシャル補正技術が開発されており、幅広い新しいアプリケーションを可能にしています。
このような精度を実現するには、計算および測位結果に使用される参照座標系に注意を払う必要があり、このトピックは、この記事の範囲を超える測地学およびデータム変換で取り上げられています。
GNSS補正
GNSSの精度向上は、さまざまな誤差を補正することにかかっています。
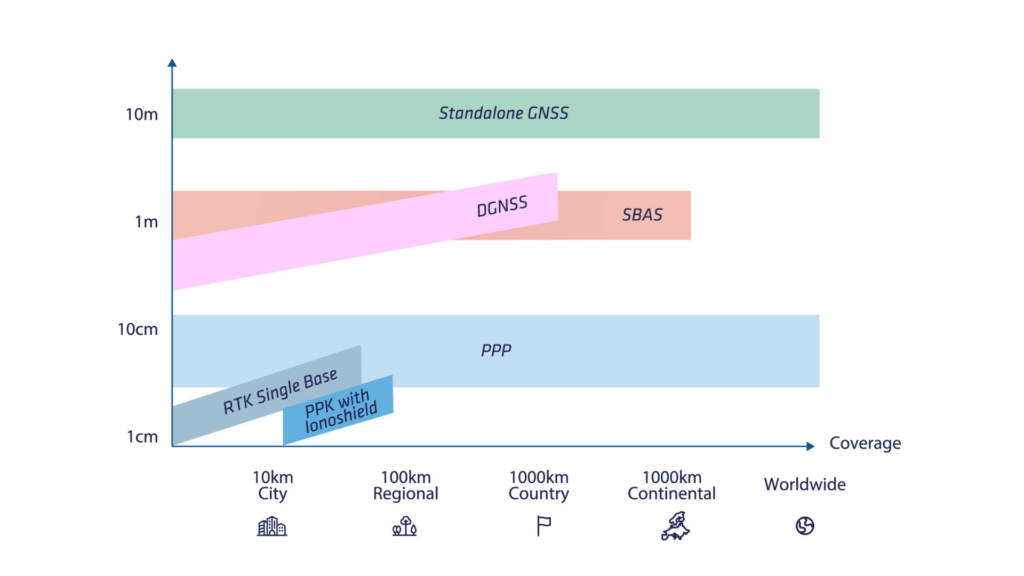
さまざまなレベルの補償範囲とパフォーマンスを提供する多くの種類の補正があります。
主なものを以下の表に詳しく示します。この記事では、最も一般的な補正の基本について説明します。DGNSSの簡単な説明に続いて、SBASとRTKの詳細な説明、およびPPKの利点について説明します。
このシリーズの次の記事では、IonoshieldとPPPについてさらに詳しく見ていきます。
ディファレンシャルGNSS(DGNSS)
従来のコードベースのDGNSSは、単純な仮定を立てています。衛星誤差と局所的な大気誤差は、狭い領域では同じであると見なされます。したがって、1対のGPS受信機を使用して、大気(電離層と対流圏)と衛星の両方の誤差を打ち消し合い、ナビゲーションのパフォーマンスを向上させることができます。
この動作モードでは、ベースステーションGNSS受信機は、ローバーのGNSS受信機の動作範囲から数キロメートル以内に設置されます。ベースステーションは、RFまたはGSMモデムを使用して、ローバー受信機に一連の補正を送信します。ローバー受信機は、これらの補正を使用して、(ベースステーションを基準とした)差分位置を計算できます。
この技術により、ナビゲーションの精度をサブメートルレベルまで向上させることができますが、RTKが高精度測位の標準になったため、現在では廃止されています。
SBAS(Satellite Based Augmentation System:衛星型補強システム)
SBASは、民間航空機の安全な航行を可能にするために開発されました。それ以来、スタンドアロンのGNSS受信機よりも高い精度を必要とする他の多くのエンドユーザーアプリケーションに使用されています。
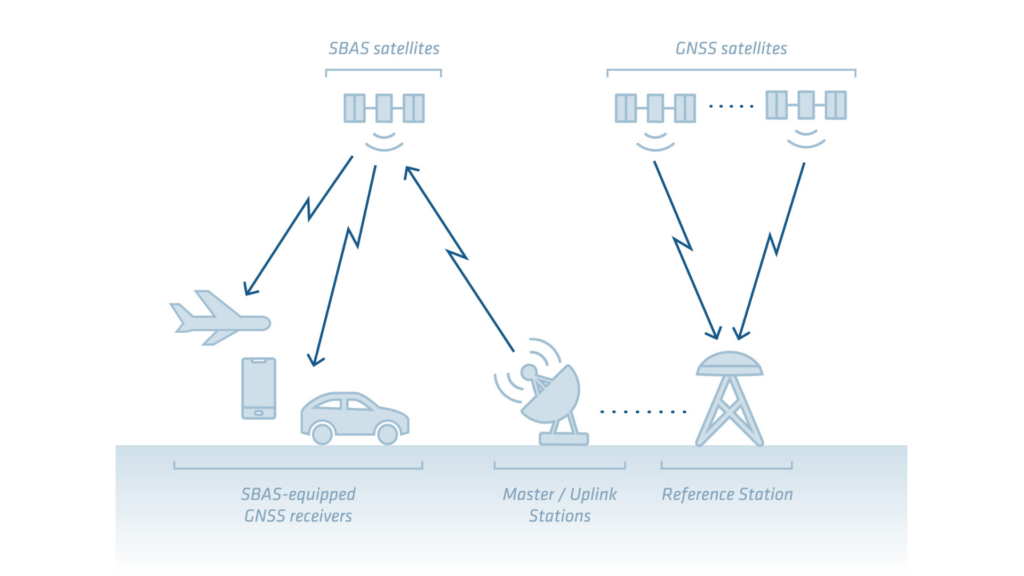
SBASの概念は、基準局のネットワークを使用して、広範囲(大陸規模の範囲)にわたってGPSのパフォーマンスを向上させることができる補正を計算することです。
これらの補正は、専用のSBAS静止衛星によってブロードキャストされます。最新のGNSS受信機は、通常のGNSSアンテナを介してこれらの補正を直接追跡し、1メートルの精度を実現するSBASなどの測位エンジンで使用できます。
すべてのSBASコンステレーションの主な目的は、最大の精度を達成することではなく、完全性(位置誤差の正確な測定)の概念を追加して、GNSSが意図されたアプリケーション(航空機のナビゲーションと着陸)に必要な最小限の精度を達成できるようにすることです。
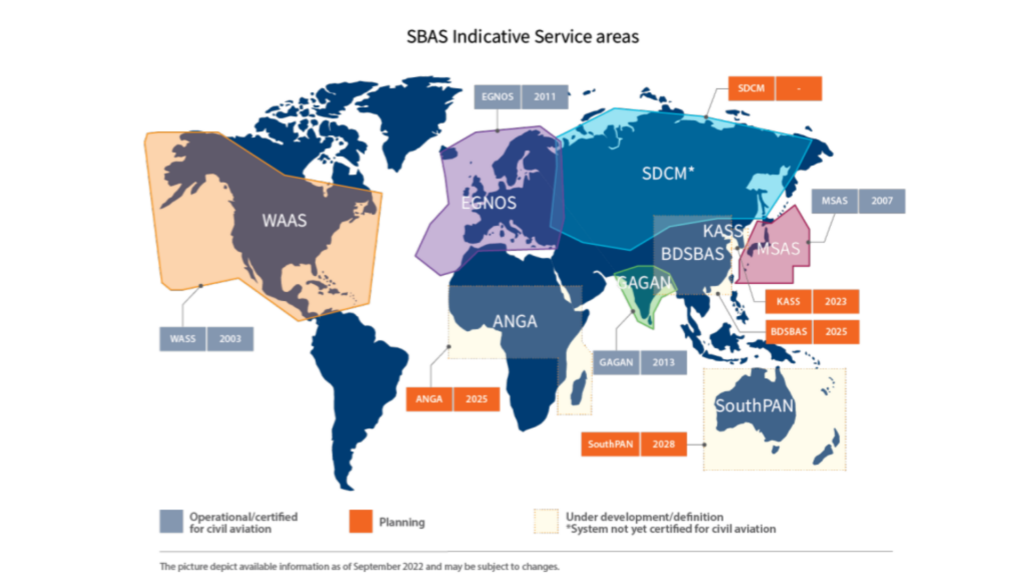
現在使用されているSBASは次のとおりです:
- 北米諸国向けWAAS
- ヨーロッパのEGNOS
- インドのGAGAN
- 日本のMSAS
ただし、現在のSBASのほとんどは、GPSコンステレーションの補正のみを提供しているため、陸上ナビゲーションには最適ではありません。将来のSBASソリューション(EGNOS V2など)は、マルチコンステレーション補正を提供する予定です。
SBASを支える技術
様々なSBASソリューションは、同じ基盤技術を使用して補正データを提供します。以下の補正を提供します。
- 衛星のクロック誤差
- 衛星軌道のずれ
- 大気誤差
SBASはまた、誤動作している衛星からのデータを拒否するために使用できる衛星の完全性情報も提供します。
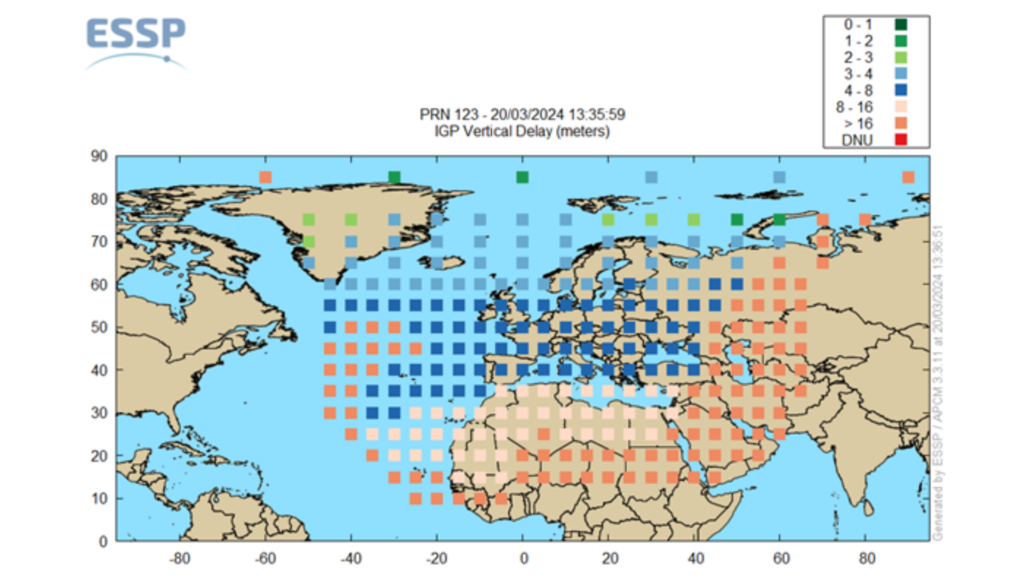
大気補正も、基地局のネットワークを使用して計算され、大気エラーのパターンを提供します。転送されるエラー値は、特定の点(IGP(Ionospheric Grid Points:電離層グリッドポイント)と呼ばれる)で大気によって導入される垂直遅延に対応します。受信機は、各衛星からのさまざまな信号の遅延を補正できます。
SBASから提供された情報を使用することにより、受信機は疑似距離ベースの測定の誤差を補正し、位置の精度を約1.2m RMS水平および1.6m RMS垂直に向上させることができます。これは、特に垂直成分の場合、スタンドアロンGNSSよりも大幅な改善です。
リアルタイムキネマティック(RTK)および後処理キネマティック(PPK)
RTK技術は、1990年代半ばに測量用途として初めて導入されました。従来の差分GPS(DGPS)と同様に、RTKも位置が正確に特定された基地局と、移動型GNSS を利用しています。
センチメートル単位の精度での測位を可能にするには、以下の2つの重要な計算ステップが必要です:
- 二重差分
- 搬送波位相測定とアンビギュイティ固定
二重差分
DGPSは通常、シングルディファレンスとコード測定のみを使用します。
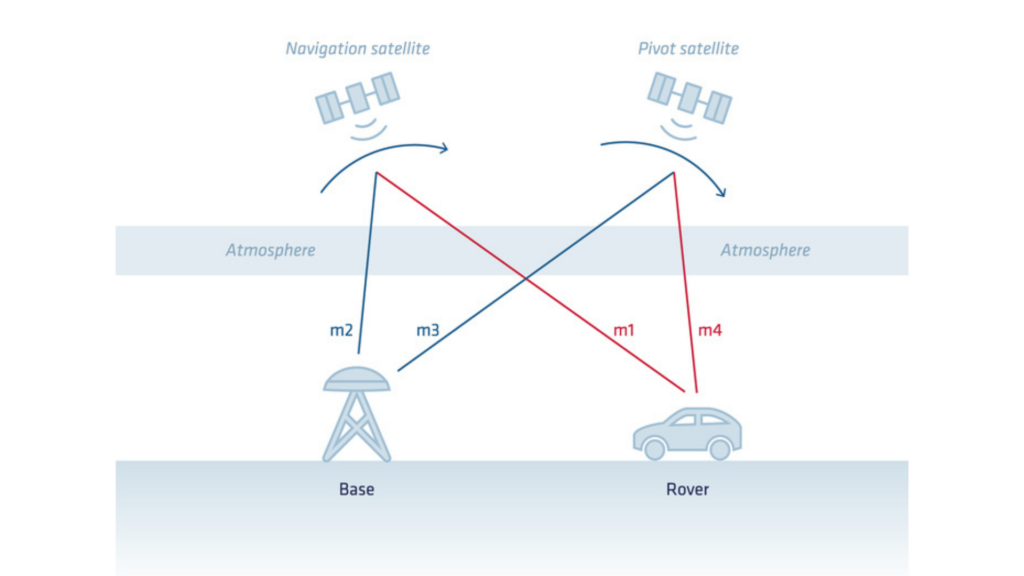
一方、RTKは位相測定を追加し、「ダブルディファレンス」アプローチを使用します。この方法では、ベース測定値がローバー測定値から減算され、すべてのナビゲーション衛星測定値がピボット衛星から減算されます。
このアプローチは、すべての衛星誘起誤差、受信機誘起誤差、および基地局の近傍で一定であると想定される大気誤差を補正できます。
この計算から、以下が得られます。
- 基地局の基準におけるローバーの位置(緯度/経度/高度)
- ローバーの時刻
基地局とローバー間の距離はベースラインと呼ばれ、RTKにおける重要な要素です。ベースラインが長くなるにつれて、共通の大気誤差と共通の衛星軌道誤差が完全には相殺されないため、誤差が増加します。これは、RTKの位置精度仕様に見られる典型的な「+1ppm」です。
搬送波位相測定とアンビギュイティ固定
前の記事で紹介した搬送波位相測定は、誤差をセンチメートルレベルまで低減するために必要です。
搬送波位相測定の課題は、本質的に曖昧(または不完全)であることです。測定には、搬送波位相サイクルが整数個不足しています。この不足部分は「アンビiguity(不確定性)」とも呼ばれます。
リアルタイムキネマティック(RTK)測位プロセスは、これらのアンビiguityを推定することから始まります。このプロセスは、「RTK Float」モードとも呼ばれます。このモードでは、アンビiguityはゆっくりと収束しますが、整数値ではありません。これにより、受信機は位置を平滑化し、約デシメートルレベルの精度を達成できます。
最大の精度と堅牢性を実現するには、次のステップとして、これらの各アンビiguityの整数値をリアルタイムで特定します。このプロセスは、整数アンビiguity解決と呼ばれます。
アンビiguity解決の結果は、RTKの精度を最大化し、より高い堅牢性を提供します。これは一般に「RTK Fixed」モードと呼ばれます。
特定の衛星への位相追跡が中断された場合、「サイクルスリップ」イベントが発生し、その衛星の整数アンビiguityを再度解決する必要があります。このため、サイクルスリップが多すぎると(特にすべての衛星で同時にサイクルスリップが発生すると)、RTKのパフォーマンスに悪影響を及ぼします。これらのイベントを制限するには、優れたアンテナとアンテナの配置、およびクリーンなRF環境が不可欠です。
後処理キネマティクス
これまで見てきたように、RTKはこれらの補正を「リアルタイム」で適用することです。つまり、ローバーは、現場でRTK処理を計算するために、ベースステーションへのデータリンク接続が必要です。
一部のアプリケーションでは、リアルタイムでの軌跡は必要ありませんが、より高い精度またはより簡単なセットアップからメリットを得ることができます。後処理キネマティック(PPK)は、これらのニーズを満たすことができます。PPKを使用すると、ローバーはリアルタイムの補正を受信せずに、データ収集中に独自の生のGNSSデータを収集します。後で、このデータは、ベースステーションまたは基準局のネットワークからの正確な情報を使用して後処理されます。
PPKは、リアルタイム補正に依存しないため、データ収集の柔軟性が向上します。航空マッピング、ドローンサーベイ、科学研究など、リアルタイム通信が困難または不要なシナリオでよく使用されます。
ディファレンシャル補正にPPKを使用する利点
PPKは、GNSSを処理する際に、次の主な利点を提供します。
- 改善されたフィールドワークフロー:RTKベースのミッションの主なコストは、ベースステーションが近くにあることを確認し、必要に応じてベースステーションをセットアップし、信頼性の高いデータ接続を確保することなどです。Qinertiaには、多数の組み込みCORSネットワークがあります。サードパーティネットワークへの直接アクセス。これにより、ベースの可用性を確保し、信頼性の高いデータ接続をセットアップする複雑さが解消されます。
- 改善された品質管理:多くの品質指標は、処理の実際のパフォーマンスを評価するのに役立ちます。これらには、高度な統計、分離(順方向処理と逆方向処理で計算された位置/姿勢の差)、およびGNSS信号インジケーターが含まれます。
- 全体的なパフォーマンスの向上:RTKのアンビギュイティ解決には、時間がかかる場合があります(ベースステーションからの距離と大気条件に応じて、数秒から数分)。これは、取得の開始時や、GNSSの状態が悪い場合に重要になる可能性があります。PPKは、順方向と逆方向の両方で処理して修正率を最大化することにより、これらの影響を軽減します。パフォーマンスは、より高度なアルゴリズムを使用するか、正確な衛星暦を使用することによっても向上させることができます。
