Ekinox Micro e Quanta Micro sono all'avanguardia nella navigazione urbana e li abbiamo sottoposti a test automobilistici.
Sono due sistemi di navigazione inerziale che combinano IMU tattiche basate su MEMS e ricevitori GNSS RTK completi per offrire prestazioni senza precedenti in una forma incredibilmente compatta.
Appositamente studiati per applicazioni con rigidi vincoli SWaP come veicoli terrestri/aerei/marittimi senza equipaggio, mappatura di interni e persino rilievi UAV.
Questo articolo completo di valutazione delle prestazioni si basa su un test esaustivo eseguito nel luglio 2022 per convalidare le capacità di Quanta Micro in previsione della sua introduzione commerciale. Attraverso questo rapporto, vengono dimostrate le prestazioni dinamiche dei sistemi.
I sensori sono stati ampiamente testati in vari ambienti GNSS, tra cui cielo aperto, aree urbane medie e canyon urbani. I risultati hanno costantemente mostrato un'eccezionale qualità dei dati. Sia Quanta Micro che Ekinox Micro hanno superato le loro prestazioni specificate, anche in scenari difficili.
Mentre le specifiche si basano solitamente sullo scenario standard del settore, come le normali condizioni del terreno dopo una fase di riscaldamento, il test includeva difficili condizioni urbane senza una fase di riscaldamento.
Sorprendentemente, Ekinox Micro e Quanta Micro hanno eccelso in questo test, dimostrando prestazioni eccezionali in tutte le condizioni.
Prerequisito
La lettura di questi rapporti di prova richiede un certo livello di conoscenza della navigazione inerziale e dei concetti di post-elaborazione. La nostra knowledge base ti aiuterà ad iniziare il tuo viaggio nello straordinario mondo della navigazione inerziale.
Acronimi
- CORS: Stazioni di riferimento operative ininterrottamente (Continuously Operating Reference Stations)
- DUT: Dispositivo sotto test
- EUT: Apparecchiatura in prova
- FOG: Giroscopio a fibra ottica
- GNSS: Global Navigation Satellite Systems (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (agenzia geografica ufficiale francese)
- IMU: Inertial Measurement Unit
- INS: Sistema di Navigazione Inerziale
- LiDAR: Light Detection And Ranging
- MEMS: Micro Electro-Mechanical System
- Merged: Post-elaborazione Forward + Backward utilizzando Qinertia
- PPK: Cinematico post-elaborato
- RGP: Réseau GNSS Permanent (rete CORS nazionale francese)
- RMS: Root Mean Square (valore quadratico medio)
- RTK: Cinematico in Tempo Reale
- Std: Deviazione standard
- SWaP-C: Dimensioni, peso, potenza e costo
- TC: Accoppiamento Stretto (Tight Coupling)
- UAV: Unmanned Aerial Vehicle
Obiettivi e specifiche della missione di test
Pianificazione ed esecuzione della missione
Il test è stato condotto a bordo del veicolo di test SBG Systems il 7 luglio 2022. Si è trattato di un percorso di 115 minuti, in condizioni meteorologiche ottimali, nelle vicinanze delle strutture SBG System, tra cui:
- 45 minuti di operazioni continue in condizioni di cielo aperto.
- 35 minuti di operazioni contigue in ambiente urbano semi-denso.
- 35 minuti di operazioni contigue in ambiente urbano difficile, inclusi tunnel.

Considerata la complessità dell'ambiente, non è stata prestata particolare attenzione alla pianificazione della missione per selezionare un orario favorevole in relazione alla visibilità dei satelliti.
Obiettivi della missione
Questa missione è stata specificamente progettata per dimostrare come Quanta Micro ed Ekinox Micro INS si comportano in uno scenario reale. Ciò ci ha permesso di convalidare che gli INS soddisfano (e superano) le loro specifiche, ma anche di dimostrare le loro eccezionali prestazioni anche nelle condizioni GNSS più difficili.
Durante la missione abbiamo raccolto dati che misurano le prestazioni in tempo reale del Quanta Micro; abbiamo quindi eseguito la post-elaborazione degli stessi set di dati (PPK).
Ciò ci consente di fornire una visione completa delle prestazioni del Quanta Micro INS in un ambiente automobilistico; e in misura minore altre applicazioni (che sono oggetto di rapporti di prova specifici).
Il vantaggio dell'utilizzo di profili di movimento ottimizzati è dimostrato confrontando l'elaborazione in profili di movimento automobilistici e aerei.
Configurazione dei test automobilistici
Apparecchiatura sotto test
| Nome | Descrizione | Revisione HW | Numero di serie | Versione firmware |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Valutato per procura | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Per tutti i test, i parametri di installazione (disallineamenti, braccio di leva, ecc.) erano noti a priori, sia dai disegni CAD sia dalle calibrazioni precedenti.
Tieni presente che, sebbene entrambi gli EUT siano Quanta Micro, il contenuto di questo rapporto di prova è pienamente applicabile all'Ekinox Micro: è una versione robusta di Quanta Micro e si comporta esattamente allo stesso modo. Una serie di meticolosi confronti interni hanno confermato questa affermazione.
Traiettoria di riferimento
La fonte di riferimento utilizzata per valutare gli errori di prestazione è una traiettoria ad accoppiamento stretto elaborata da Qinertia con dati provenienti dall'IMU Horizon SBG Systems (prestazioni ottimali basate su FOG), Navsight-S e dall'odometro Pegasem installato a bordo del veicolo insieme all'EUT. La versione di Qinertia utilizzata per la post-elaborazione era la 3.2.881-stable.
| Nome | Descrizione | Accuratezza della posizione | Precisione dell'assetto | Accuratezza dell'heading |
|---|---|---|---|---|
| Navsight Horizon | INS basato su FOG | 0.01m (0.01m @ 10s) (0.05m @ 60s) | 0,004° (0,004° a 10 s) (0,005° a 60 s) | 0,008° (0,008° a 10 s) (0,010° a 60 s) |
Le due antenne GNSS VSP6037L che alimentano il Navsight-S sono condivise con l'EUT (vedere lo schema di configurazione del test).
Dall'analisi dei dati a posteriori, gli indicatori di qualità (stimatori della deviazione standard di posizione e assetto) della traiettoria post-elaborata di Horizon consentono pienamente di utilizzare quest'ultima come riferimento rispetto all'EUT.
Ciascuna delle tre posizioni INS installate a bordo è stata trasferita a un punto comune per consentire confronti diretti.
Stazione base
Tutte le operazioni PPK e RTK sono state eseguite utilizzando una singola base, la stazione SBG’S installata sul tetto delle strutture SBG Systems e inclusa nell'IGN RGP, la rete CORS francese.
SBGS fornisce il tracciamento completo delle costellazioni GNSS (GPS + GLONASS + GALILEO + BEIDOU). Tutte e quattro le costellazioni sono state utilizzate per le operazioni RTK in tempo reale.
Veicolo di test
Il veicolo di prova era un furgone dedicato SBG Systems, dotato della nostra attrezzatura standard come presentato nel seguente schema di configurazione.

La linea di base tra entrambe le antenne GNSS è di circa 2 m e la maggior parte dei parametri di installazione sono noti con una precisione particolarmente elevata.
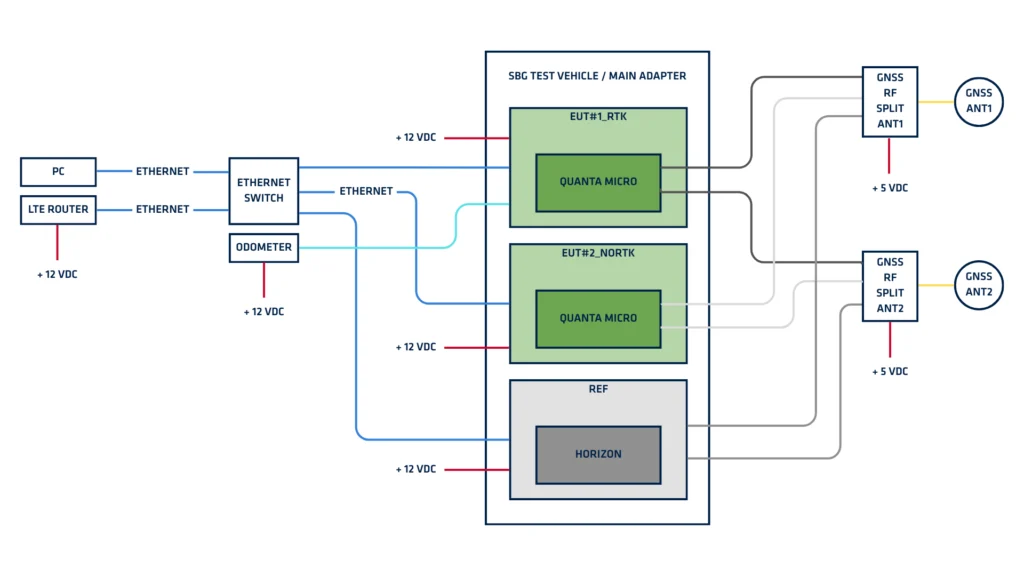
Configurazione EUT
L'apparecchiatura in prova (EUT) è stata configurata come segue per le misurazioni in tempo reale:
- EUT1: GNSS con tutte e 4 le costellazioni, RTK e ausilio odometrico.
- EUT2: GNSS con tutte e 4 le costellazioni, senza RTK, senza ausilio odometrico.
Risultati dei test automobilistici
I test automobilistici includono una fase di riscaldamento e tutte le statistiche sono state calcolate includendola intenzionalmente.
Questa scelta ha nella maggior parte dei casi un impatto negativo sulla maggior parte dei dati, specialmente per gli errori di heading che diminuiscono molto rapidamente nei primi 5-10 minuti della missione e dove i valori elevati hanno un impatto significativo su std e RMS.
Inoltre, abbiamo calcolato le statistiche dual antenna senza RTK, RTK e PPK, che rappresentano al meglio i profili automobilistici, includendo intenzionalmente tutte e tre le parti della missione: cielo aperto, ambiente GNSS medio e difficile. Anche questa scelta ha un impatto negativo sulla maggior parte dei dati.
Queste due scelte fanno apparire i valori pessimistici. Tuttavia, dimostrano che Quanta Micro è ancora utilizzabile con prestazioni particolarmente buone subito dopo la fase di allineamento (anche se non è possibile un warm-up) e dimostrano la robustezza degli algoritmi di Quanta Micro che sono in grado di soddisfare quasi le specifiche di prestazione del prodotto anche in un ambiente di test molto più difficile di quanto specificato.
Scenari in tempo reale
Questi INS sono in grado di funzionare in tempo reale, fornendo una soluzione di navigazione ad alta frequenza e bassa latenza con o senza correzioni RTK. Le tabelle e le figure seguenti forniscono risultati dettagliati in tempo reale per entrambi gli EUT nelle seguenti condizioni.
- profilo di movimento automobilistico
- odometer aiding per EUT #1 (RTK), nessun odometer aiding per EUT #2 (No RTK)
- con input di heading GNSS dual antenna
| EUT#1 (RTK + odo) | EUT#2 (no RTK, no odo) | |||
|---|---|---|---|---|
| Errore | 68% | 95% | 68% | 95% |
| Posizione 2D | 0.021m | 0.246m | 1.155m | 2.734m |
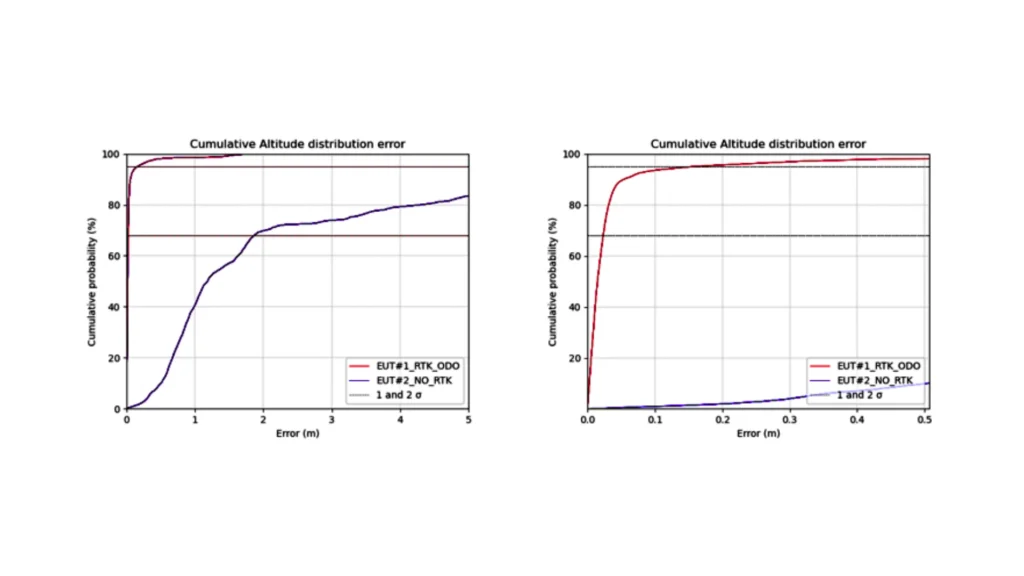
| Posizione verticale | 0.023m | 0.157m | 1.865m | 7.329m |
| Rollio/Beccheggio | 0.011° | 0.026° | 0.015° | 0.035° |
| Imbardata | 0.060° | 0.140° | 0.078° | 0.190° |
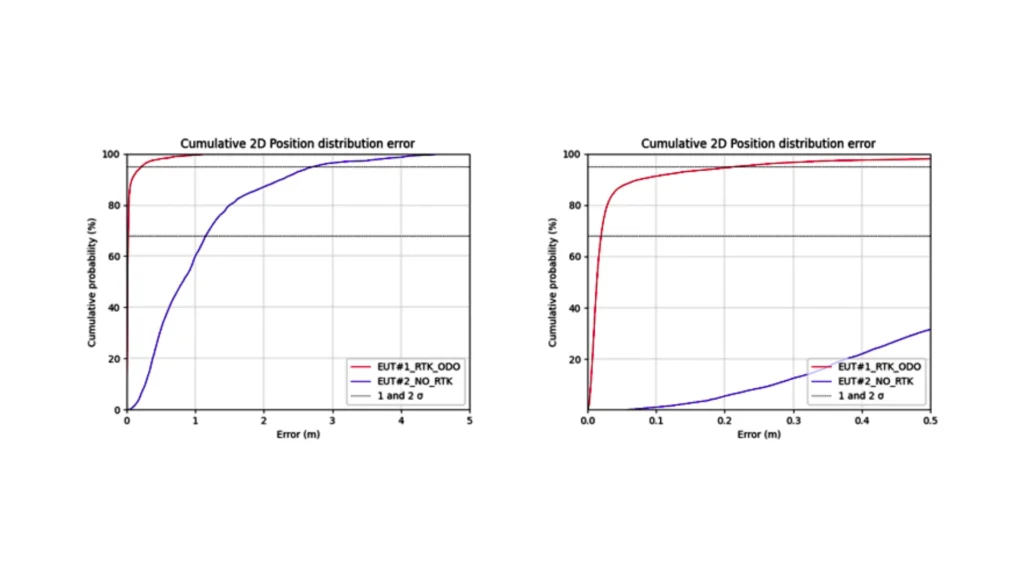
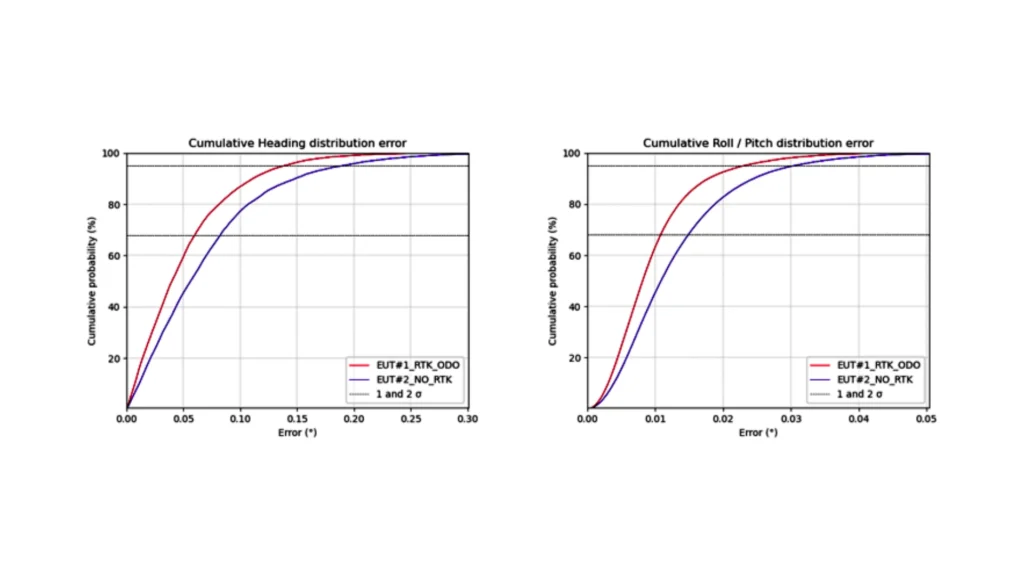
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Scenari post-elaborati
Questi scenari valutano le massime prestazioni del prodotto ottenibili con il software di post-elaborazione Qinertia in modalità di calcolo TC merged (forward + backward) e confrontano l'influenza del profilo di movimento. I risultati, visualizzati per un singolo EUT (EUT #2), sono risultati quasi identici per entrambe le unità.
| Profilo TC Automotive (doppia antenna + odo) | Profilo TC Aereo (singola antenna | |||
|---|---|---|---|---|
| Errore | 68% | 95% | 68% | 95% |
| Posizione 2D | 0.014m | 0.093m | 0.014m | 0.100m |
| Posizione verticale | 0.008m | 0.032m | 0.008m | 0.034m |
| Rollio/Beccheggio | 0.011° | 0.032° | 0.011° | 0.032° |
| Imbardata | 0.051° | 0.211° | 0.041° | 0.208° |
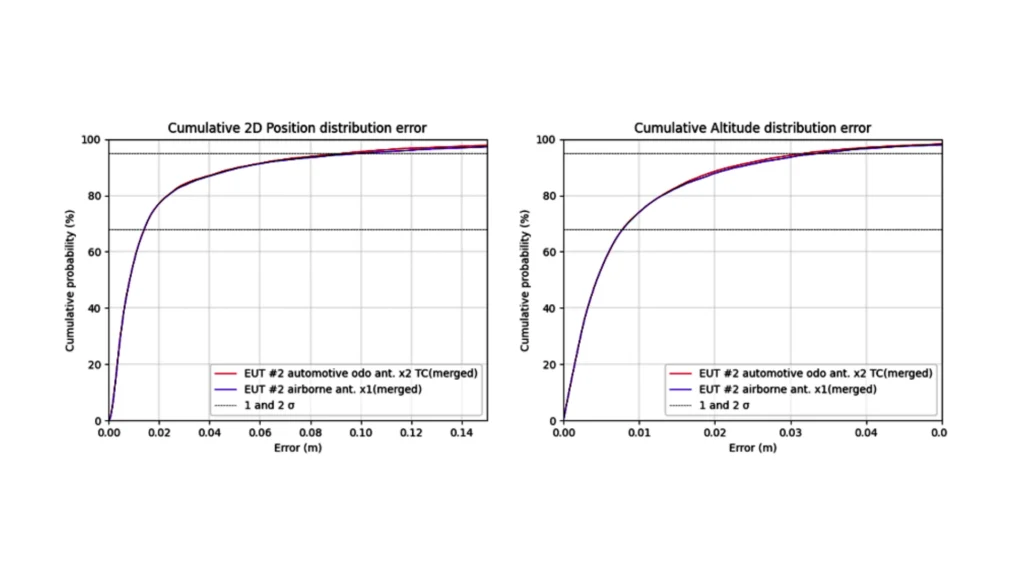
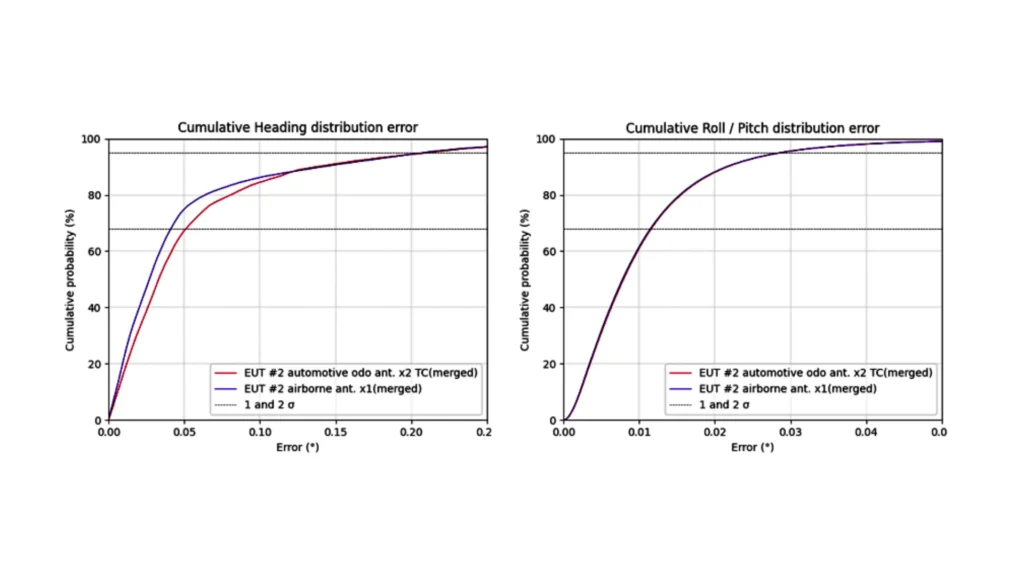
La tabella e i grafici precedenti mostrano che il profilo di movimento ha un'influenza marginale sulle prestazioni di post-elaborazione.
Anche se l'ambiente GNSS era molto difficile, il prodotto si comporta molto bene e produce risultati molto accurati. Come per il tempo reale, limitare la missione a cielo aperto e ambiente urbano medio porta a risultati migliori delle specifiche del prodotto.
Conclusione
Il test e la successiva analisi dei dati di Ekinox Micro e Quanta Micro evidenziano le loro elevate capacità, affidabilità e precisione. Questi sistemi offrono prestazioni eccezionali sia in modalità antenna singola che doppia (ricevitori GNSS RTK), anche in ambienti difficili.
Ekinox Micro e Quanta Micro sono scelte eccellenti per applicazioni in tempo reale che richiedono un posizionamento e una determinazione dell'assetto stabili e precisi. Funzionano efficacemente anche in ambienti urbani esigenti, dimostrando la loro robustezza.
Inoltre, in scenari in cui le prestazioni in tempo reale non sono cruciali (come il rilevamento LiDAR e la fotogrammetria), il software Qinertia di SBG Systems offre un post-processing eccezionale, elevando le prestazioni a una precisione a livello centimetrico anche in ambienti GNSS difficili. Ciò rende la combinazione dell'INS e di Qinertia la scelta perfetta per la georeferenziazione diretta e le tecniche SLAM.
Questo studio convalida in modo conclusivo che Quanta Micro ed Ekinox Micro sono adatti a diverse applicazioni, comprese quelle con rigorose considerazioni su dimensioni, peso e prestazioni.
- Quanta Micro, progettato come una soluzione OEM, si integra perfettamente nelle applicazioni di rilievo UAV e navigazione volumetrica.
- Con il suo design intuitivo e la sua robustezza (qualificato secondo MIL-STD-461 e MIL-STD-1275), Ekinox Micro è adatto per applicazioni di rilievo leggero, ma è al suo meglio nelle applicazioni di navigazione dove la robustezza è fondamentale.
Per le attività di rilievo che richiedono parametri SWaP-C più flessibili e una maggiore precisione in un ampio spettro di condizioni, SBG Systems offre i prodotti Quanta Plus, Quanta Extra, Ekinox, Apogee e Navsight. Queste alternative, anch'esse pienamente compatibili con le capacità di post-elaborazione di Qinertia, offrono livelli di prestazioni superiori e rappresentano un'ottima opzione per le applicazioni che richiedono le massime prestazioni.
Scarica il report in PDF