Ekinox Micro i Quanta Micro znajdują się w czołówce nawigacji miejskiej i poddaliśmy je testom samochodowym.
Są to dwa inercyjne systemy nawigacyjne, łączące taktyczny IMU oparty na MEMS i w pełni funkcjonalne odbiorniki RTK GNSS, aby zapewnić niezrównaną wydajność w zadziwiająco kompaktowej formie.
Specjalnie dostosowane do zastosowań o ścisłych ograniczeniach SWaP, takich jak bezzałogowe pojazdy lądowe/powietrzne/morskie, mapowanie wnętrz, a nawet pomiary UAV.
Ten kompleksowy artykuł oceniający wydajność opiera się na wyczerpujących testach przeprowadzonych w lipcu 2022 r. w celu walidacji możliwości Quanta Micro w oczekiwaniu na jego komercyjne wprowadzenie. W niniejszym raporcie zademonstrowano dynamiczną wydajność systemów.
Czujniki były szeroko testowane w różnych środowiskach GNSS, w tym na otwartym niebie, na obszarach miejskich o średniej zabudowie i w wąwozach miejskich. Wyniki konsekwentnie wykazywały wyjątkową jakość danych. Zarówno Quanta Micro, jak i Ekinox Micro przekroczyły swoje określone parametry, nawet w trudnych scenariuszach.
Podczas gdy specyfikacje są zwykle oparte na standardowym scenariuszu branżowym, takim jak regularne warunki lądowe po fazie rozgrzewki, test obejmował trudne warunki miejskie bez fazy rozgrzewki.
Co ciekawe, Ekinox Micro i Quanta Micro wyróżniły się w tym teście, demonstrując wyjątkową wydajność we wszystkich warunkach.
Wymagania wstępne
Czytanie raportów z testów wymaga pewnej wiedzy na temat nawigacji inercyjnej i post-processingu. Nasza baza wiedzy pomoże Ci rozpocząć podróż w fascynujący świat nawigacji inercyjnej.
Akronimy
- CORS: Stacje Referencyjne Działające w Trybie Ciągłym (Continuously Operating Reference Stations)
- DUT: Urządzenie testowane (Device under test)
- EUT: Testowany sprzęt (Equipment under test)
- FOG: Żyroskop światłowodowy (Fiber Optic Gyroscope)
- GNSS: Globalne Systemy Nawigacji Satelitarnej (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (oficjalna francuska agencja geograficzna)
- IMU: Inercyjna Jednostka Pomiarowa (Inertial Measurement Unit)
- INS: Inercyjny System Nawigacyjny
- LiDAR: Wykrywanie i określanie odległości za pomocą światła (Light Detection And Ranging)
- MEMS: Mikro-Elektro-Mechaniczny System (Micro Electro-Mechanical System)
- Merged: Przetwarzanie końcowe Forward + Backward z wykorzystaniem Qinertia
- PPK: Post-processed Kinematic
- RGP: Réseau GNSS Permanent (Francuska sieć CORS)
- RMS: Root Mean Square
- RTK: Real-Time Kinematic
- Std: Odchylenie standardowe
- SWaP-C: rozmiar, masa i moc – koszt
- TC: Tight Coupling
- UAV: Bezzałogowy statek powietrzny
Cele i specyfikacje misji testowej
Planowanie i realizacja misji
Test został przeprowadzony na pokładzie pojazdu testowego SBG Systems 7 lipca 2022 roku. Była to 115-minutowa jazda w pogodnych warunkach pogodowych, w pobliżu obiektów SBG Systems, w tym:
- 45 minut ciągłej pracy w warunkach otwartego nieba.
- 35 minut ciągłej pracy w środowisku miejskim o średniej gęstości zabudowy.
- 35 minut ciągłej pracy w trudnym środowisku miejskim, w tym w tunelach.

Biorąc pod uwagę złożoność środowiska, nie zwrócono szczególnej uwagi na planowanie misji w celu wybrania dogodnej pory dnia ze względu na widoczność satelitów.
Cele misji
Ta misja została specjalnie zaprojektowana, aby zademonstrować, jak Quanta Micro i Ekinox Micro INS zachowują się w rzeczywistym scenariuszu. Pozwoliło nam to zweryfikować, czy INS spełniają (i przekraczają) swoje specyfikacje, ale także zademonstrować ich wyjątkową wydajność nawet w najtrudniejszych warunkach GNSS.
Podczas misji zebraliśmy dane mierzące wydajność Quanta Micro w czasie rzeczywistym; następnie wykonaliśmy post-processing tych samych zbiorów danych (PPK).
Pozwala nam to zapewnić pełny wgląd w wydajność Quanta Micro INS w środowisku motoryzacyjnym; i w mniejszym stopniu w innych zastosowaniach (które są przedmiotem specjalnych raportów z testów).
Zaletę stosowania zoptymalizowanych profili ruchu demonstruje porównanie przetwarzania w profilach ruchu samochodowym i lotniczym.
Konfiguracja testów samochodowych
Testowane urządzenie
| Nazwa | Opis | Wersja HW | Numer seryjny | Wersja oprogramowania układowego |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Oceniono pośrednio | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Parametry instalacyjne (niewspółosiowości, ramię dźwigni itp.) dla wszystkich testów były znane a priori z rysunków CAD lub z poprzednich kalibracji.
Należy pamiętać, że chociaż oba EUT to Quanta Micro, treść tego raportu z testów w pełni odnosi się do Ekinox Micro: jest to wytrzymała wersja Quanta Micro i zachowuje się dokładnie w ten sam sposób. Seria drobiazgowych porównań wewnętrznych potwierdziła to stwierdzenie.
Referencyjna trajektoria
Referencyjnym źródłem użytym do oceny błędów wydajności jest trajektoria ściśle sprzężona, przetworzona w Qinertia, z danymi pochodzącymi z SBG Systems Horizon IMU (najwyższa wydajność oparta na FOG), Navsight-S i licznika kilometrów Pegasem zainstalowanych na pokładzie pojazdu wraz z EUT. Wersja Qinertia użyta do post-processingu to 3.2.881-stable.
| Nazwa | Opis | Dokładność pozycji | Dokładność orientacji | Dokładność heading |
|---|---|---|---|---|
| Navsight Horizon | INS oparte na FOG | 0.01m (0.01m @ 10s) (0.05m @ 60s) | 0.004° (0.004° @ 10s) (0.005° @ 60s) | 0.008° (0.008° @ 10s) (0.010° @ 60s) |
Dwie anteny VSP6037L GNSS zasilające Navsight-S są współdzielone z EUT (patrz schemat konfiguracji testu).
Z analizy danych a posteriori wynika, że wskaźniki jakości (estymatory odchylenia standardowego pozycji i orientacji) post-processingu trajektorii Horizon w pełni pozwalają na wykorzystanie jej jako odniesienia w stosunku do EUT.
Każda z trzech pozycji INS zainstalowanych na pokładzie została przeniesiona do wspólnego punktu, aby umożliwić bezpośrednie porównania.
Stacja bazowa
Wszystkie operacje PPK i RTK zostały wykonane przy użyciu pojedynczej bazy, stacji SBG, która jest zainstalowana na dachu obiektów SBG Systems i włączona do IGN RGP, francuskiej sieci CORS.
SBGS zapewnia pełne śledzenie konstelacji GNSS (GPS + GLONASS + GALILEO + BEIDOU). Wszystkie cztery konstelacje zostały wykorzystane do operacji RTK w czasie rzeczywistym.
Pojazd testowy
Pojazdem testowym był dedykowany van SBG Systems, wyposażony w nasz standardowy sprzęt, jak przedstawiono na poniższym schemacie konfiguracji.

Linia bazowa między obiema antenami GNSS wynosi około 2 m, a większość parametrów instalacyjnych jest znana ze szczególnie dobrą precyzją.
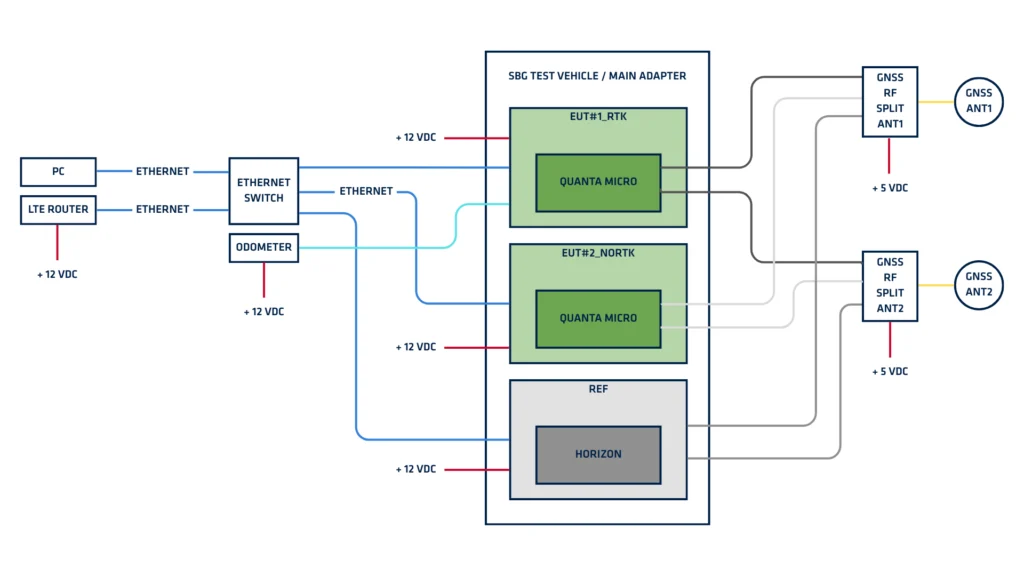
Konfiguracja EUT
Testowane urządzenie (Equipment under test - EUT) zostało skonfigurowane w następujący sposób do pomiarów w czasie rzeczywistym:
- EUT1: GNSS z obsługą wszystkich 4 konstelacji, RTK i wspomaganiem z licznika przebiegu.
- EUT2: GNSS z obsługą wszystkich 4 konstelacji, bez RTK, bez wspomagania z licznika przebiegu.
Wyniki testów motoryzacyjnych
Testy w branży motoryzacyjnej obejmują fazę rozgrzewki, a wszystkie statystyki zostały obliczone z jej celowym uwzględnieniem.
Ten wybór ma w większości przypadków negatywny wpływ na większość danych, szczególnie na błędy heading, które bardzo szybko maleją w ciągu pierwszych 5-10 minut misji, a wysokie wartości mają znaczący wpływ na odchylenie standardowe i RMS.
Dodatkowo, obliczyliśmy statystyki dla konfiguracji bez RTK, RTK i PPK z dwiema antenami, które najlepiej reprezentują profile motoryzacyjne, celowo uwzględniając wszystkie trzy części misji: otwartą przestrzeń, środowisko GNSS o średniej i wysokiej trudności. Ten wybór również ma negatywny wpływ na większość danych.
Te dwa wybory sprawiają, że wartości wydają się pesymistyczne. Pokazują jednak, że Quanta Micro jest nadal użyteczna i charakteryzuje się szczególnie dobrą wydajnością zaraz po fazie wyrównania (nawet jeśli rozgrzewka nie jest możliwa) i dowodzą solidności algorytmów Quanta Micro, które są w stanie prawie spełnić specyfikacje wydajności produktu, nawet w środowisku testowym znacznie trudniejszym niż określone.
Scenariusze w czasie rzeczywistym
Te INS są w stanie działać w czasie rzeczywistym, zapewniając rozwiązanie nawigacyjne o wysokiej częstotliwości i niskim opóźnieniu, z korekcjami RTK lub bez. Poniższe tabele i rysunki przedstawiają szczegółowe wyniki w czasie rzeczywistym dla obu EUT w następujących warunkach.
- profil ruchu pojazdu
- wspomaganie licznikiem przebiegu dla EUT #1 (RTK), brak wspomagania licznikiem przebiegu dla EUT #2 (bez RTK)
- z wejściem kursu z podwójnej anteny GNSS
| EUT#1 (RTK + odo) | EUT#2 (bez RTK, bez odo) | |||
|---|---|---|---|---|
| Błąd | 68% | 95% | 68% | 95% |
| Pozycja 2D | 0.021m | 0.246m | 1.155m | 2.734m |
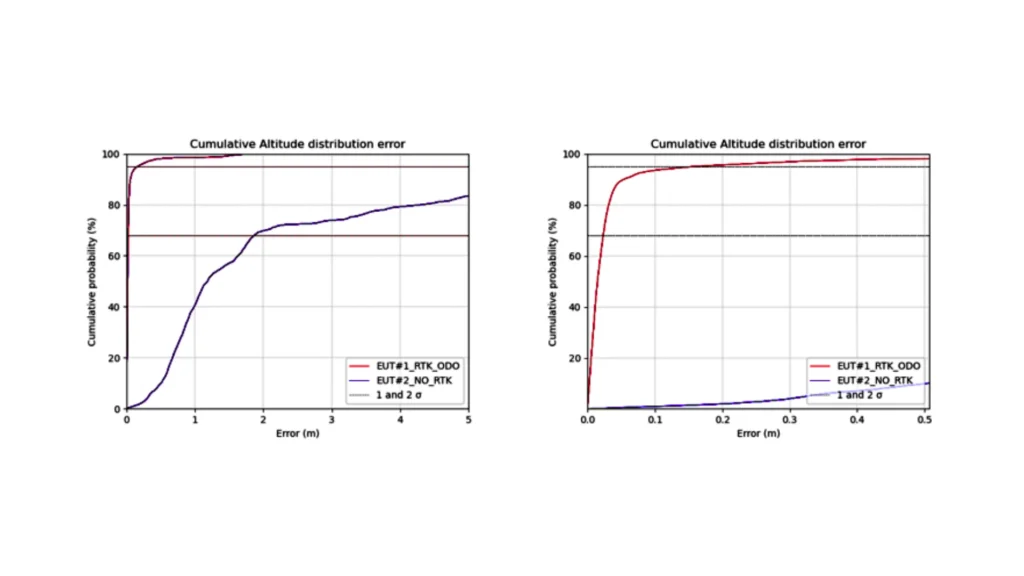
| Pozycja pionowa | 0.023m | 0.157m | 1.865m | 7.329m |
| Roll / Pitch | 0.011° | 0.026° | 0.015° | 0.035° |
| Odchylenie | 0.060° | 0.140° | 0.078° | 0.190° |
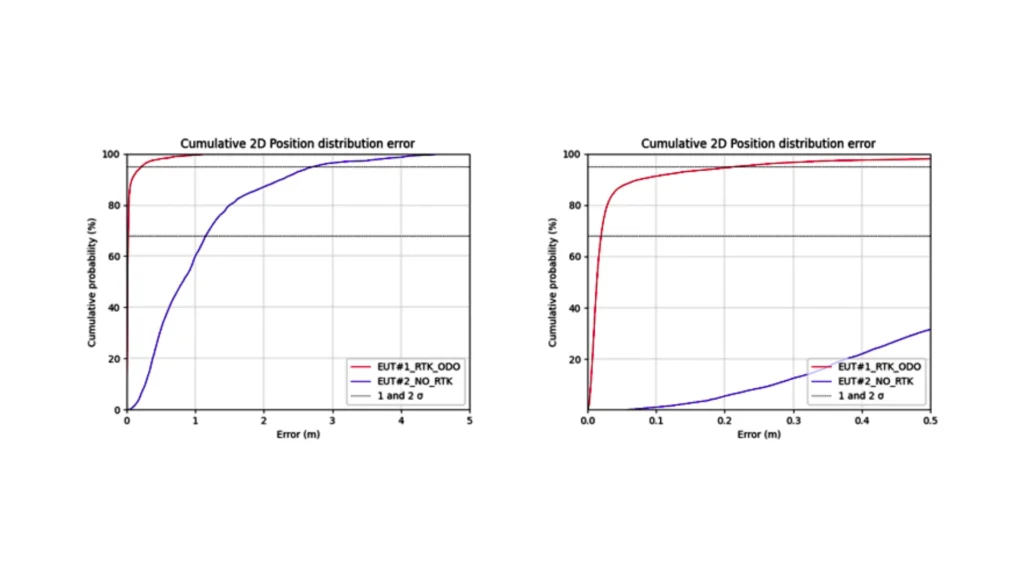
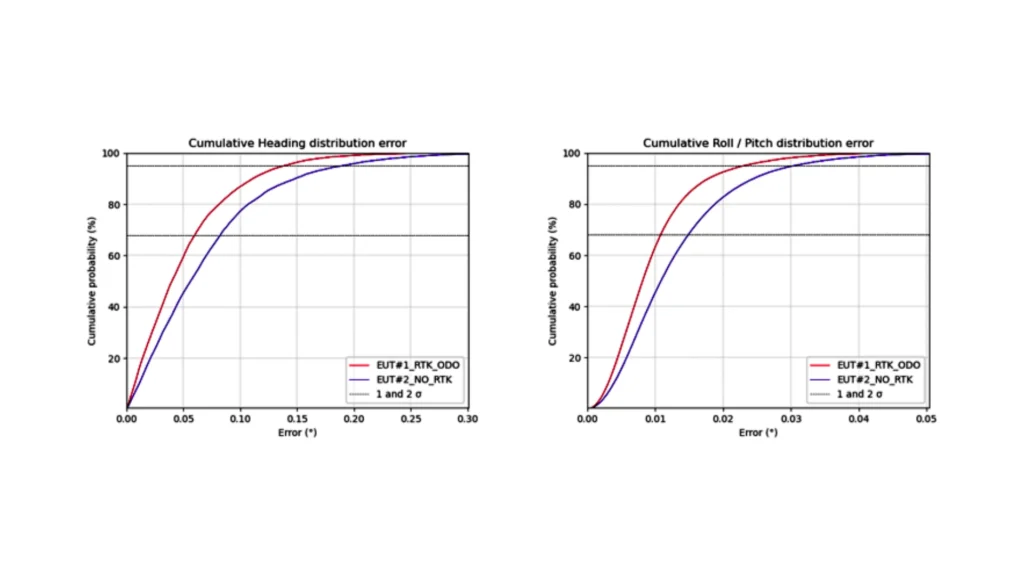
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Scenariusze przetwarzane końcowo
Te scenariusze oceniają maksymalną wydajność produktu, jaką można osiągnąć dzięki oprogramowaniu do post-processingu Qinertia w trybie obliczeniowym TC merged (do przodu + do tyłu), i porównują wpływ profilu ruchu. Wyniki, przedstawione dla pojedynczego EUT (EUT #2), były niemal identyczne dla obu jednostek.
| Profil motoryzacyjny TC (podwójna antena + odo) | Profil lotniczy TC (pojedyncza antena | |||
|---|---|---|---|---|
| Błąd | 68% | 95% | 68% | 95% |
| Pozycja 2D | 0.014m | 0.093m | 0.014m | 0.100m |
| Pozycja pionowa | 0.008m | 0.032m | 0.008m | 0.034m |
| Roll / Pitch | 0.011° | 0.032° | 0.011° | 0.032° |
| Odchylenie | 0.051° | 0.211° | 0.041° | 0.208° |
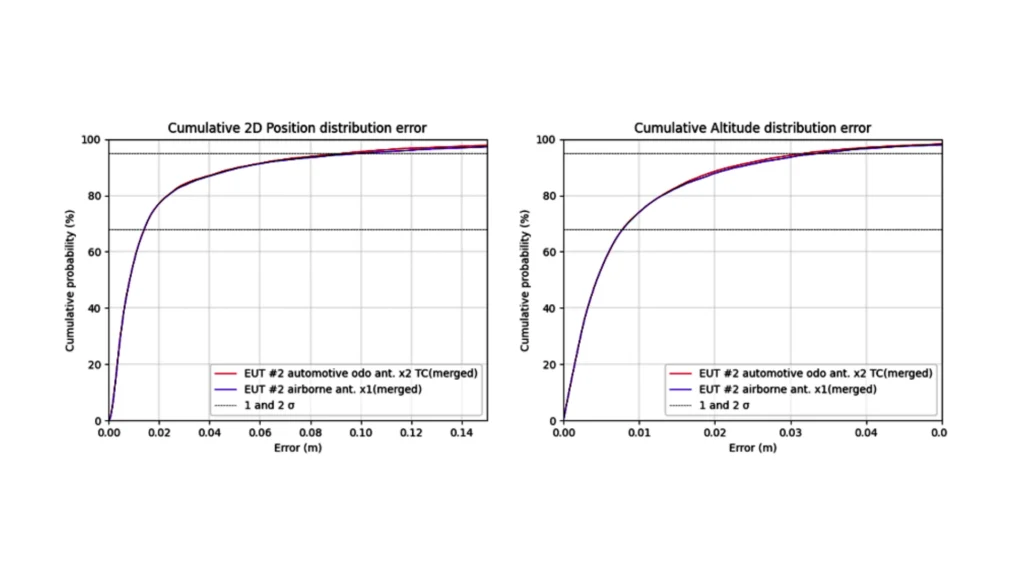
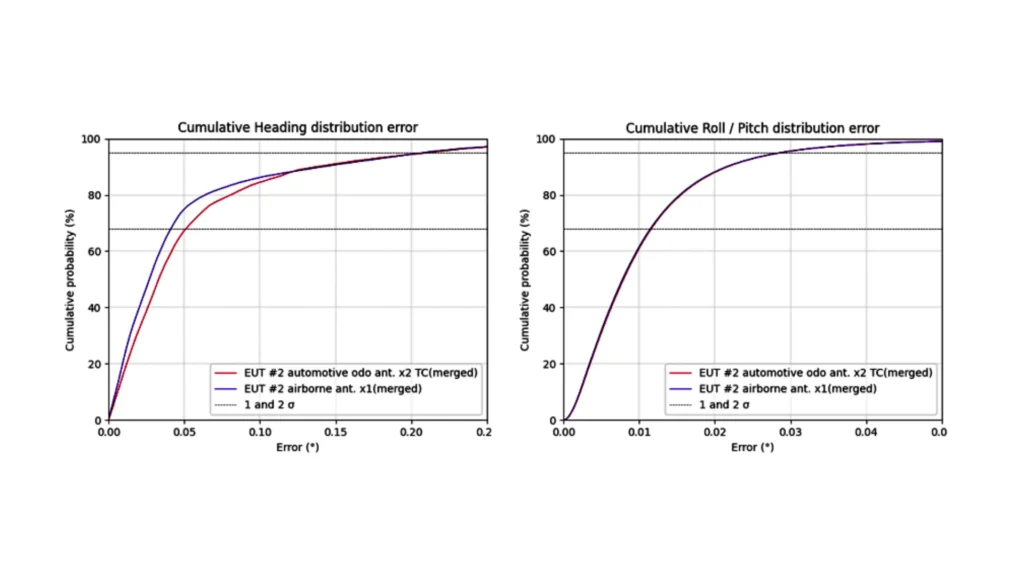
Z powyższej tabeli i wykresów wynika, że profil ruchu ma niewielki wpływ na wydajność post-processingu.
Pomimo bardzo trudnych warunków GNSS, produkt zachowuje się bardzo dobrze i generuje bardzo dokładne wyniki. Jeśli chodzi o czas rzeczywisty, ograniczenie misji do otwartej przestrzeni i średniego środowiska miejskiego prowadzi do wyników lepszych niż specyfikacje produktu.
Podsumowanie
Testy i późniejsza analiza danych systemów Ekinox Micro i Quanta Micro podkreślają ich wysokie możliwości, niezawodność i dokładność. Systemy te działają wyjątkowo dobrze zarówno w trybie pojedynczej, jak i podwójnej anteny (odbiorniki RTK GNSS), nawet w wymagających środowiskach.
Ekinox Micro i Quanta Micro to doskonały wybór do zastosowań w czasie rzeczywistym, które wymagają stabilnego i precyzyjnego pozycjonowania oraz określania orientacji. Działają skutecznie nawet w wymagających środowiskach miejskich, demonstrując swoją wytrzymałość.
Dodatkowo, w scenariuszach, gdzie wydajność w czasie rzeczywistym nie jest kluczowa (takich jak pomiary LiDAR i fotogrametria), oprogramowanie Qinertia firmy SBG Systems oferuje wyjątkową post-processing, podnosząc wydajność do dokładności centymetrowej nawet w wymagających środowiskach GNSS. To sprawia, że połączenie INS i Qinertia jest idealnym wyborem do bezpośredniego georeferencjonowania i technik SLAM.
Badanie to jednoznacznie potwierdza, że Quanta Micro i Ekinox Micro nadają się do różnorodnych zastosowań, w tym tych z rygorystycznymi wymaganiami dotyczącymi rozmiaru, wagi i wydajności.
- Quanta Micro, zaprojektowana jako rozwiązanie OEM, bezproblemowo integruje się z pomiarami UAV i wolumetrycznymi aplikacjami nawigacyjnymi.
- Dzięki przyjaznej dla użytkownika konstrukcji i wytrzymałości (kwalifikowanej zgodnie z MIL-STD-461 i MIL-STD-1275), Ekinox Micro nadaje się do lekkich zastosowań geodezyjnych, ale najlepiej sprawdza się w aplikacjach nawigacyjnych, w których kluczowa jest niezawodność.
Do zadań pomiarowych, które wymagają bardziej elastycznych parametrów SWaP-C i wyższej precyzji w szerokim spektrum warunków, SBG Systems oferuje produkty Quanta Plus, Quanta Extra, Ekinox, Apogee i Navsight. Te alternatywy, w pełni kompatybilne z możliwościami post-processingu Qinertia, zapewniają wyższy poziom wydajności i stanowią doskonałe opcje dla aplikacji wymagających najwyższej wydajności.
Pobierz raport PDF