Ekinox Micro Quanta Micro лідерами у сфері міської навігації, і ми провели їх випробування в автомобільних умовах.
Це дві інерційні навігаційні системи, що поєднують тактичний IMU на базі MEMS IMU повнофункціональні GNSS , забезпечуючи безпрецедентну продуктивність у дивовижно компактному корпусі.
Вони спеціально розроблені для застосувань із суворими обмеженнями щодо розмірів, ваги та потужності (SWaP), таких як безпілотні наземні/повітряні/морські апарати, картографування приміщень і навіть геодезичні роботи з використанням БПЛА.
Ця вичерпна стаття з оцінки продуктивності базується на ретельних випробуваннях, проведених у липні 2022 року для перевірки можливостей Quanta Microнапередодні її комерційного випуску. У цьому звіті продемонстровано динамічну продуктивність систем.
Датчики були ретельно випробувані в різних GNSS , включаючи відкрите небо, середньоміські райони та міські каньйони. Результати послідовно демонстрували виняткову якість даних.Micro Quanta Micro Ekinox Micro свої заявлені характеристики навіть у складних сценаріях.
Хоча технічні характеристики зазвичай базуються на стандартних для галузі сценаріях, таких як звичайні наземні умови після фази розігріву, тестування включало складні міські умови без фази розігріву.
Примітно, що Ekinox Micro Quanta Micro в цьому тестуванні, продемонструвавши видатну продуктивність у всіх умовах.
Необхідна умова
Для ознайомлення з цими протоколами випробувань необхідні певні знання в галузі інерційної навігації та пост-обробки даних. Наша база знань допоможе вам розпочати свою подорож у дивовижний світ інерційної навігації.
Абревіатури
- CORS: безперервно діючі опорні станції
- DUT: пристрій, що тестується
- EUT: Обладнання, що тестується
- FOG: волоконно-оптичний гіроскоп
- GNSS: Глобальні навігаційні супутникові системи (GPS + ГЛОНАСС + БЕЙДУ + ГАЛЛІЛЕО)
- IGN: Національний географічний інститут (офіційна географічна служба Франції)
- IMU: інерційний вимірювальний блок
- INS: Інерційна навігаційна система
- LiDAR: система виявлення та вимірювання відстані за допомогою світла
- MEMS: Micro система
- Об'єднано: Пост-обробка вперед і назад із використанням Qinertia
- PPK: Кінематика з подальшою обробкою
- RGP: Réseau GNSS (французька національна мережа CORS)
- RMS: середньоквадратичне значення
- RTK: Кінематична система в режимі реального часу
- Std: Стандартне відхилення
- SWaP-C: Розміри, вага та потужність — вартість
- ТК: Тісна взаємодія
- БПЛА: безпілотний літальний апарат
Цілі та технічні вимоги випробувальної місії
Планування та виконання місій
Випробування було проведено на SBG Systems автомобілі SBG Systems 7 липня 2022 року. Це була 115-хвилинна поїздка за ясної погоди в околицях об’єктів компанії SBG Systems, зокрема:
- 45 хвилин безперервної роботи на відкритому повітрі.
- 35 хвилин безперервної роботи в умовах напівгустонаселеної міської місцевості.
- 35 хвилин безперервної роботи в складних міських умовах, зокрема в тунелях.

З огляду на складність умов, при плануванні місії не приділялося особливої уваги вибору сприятливого часу доби з точки зору видимості супутників.
Цілі місії
Ця місія була спеціально розроблена для того, щоб продемонструвати, якINS Quanta Micro Ekinox Micro INS в реальних умовах. Це дозволило нам не тільки підтвердити, що ці INS (і навіть перевищують) технічні характеристики, але й продемонструвати їхню виняткову ефективність навіть у найскладніших GNSS .
Під час місії ми зібрали дані, що вимірюють продуктивність Quanta Micro в режимі реального часу; потім ми провели постобробку тих самих наборів даних (PPK).
Це дозволяє нам надати повне уявлення про продуктивністьINS Quanta Micro INS автомобільних умовах; а також, у меншій мірі, в інших сферах застосування (які є предметом окремих звітів про випробування).
Перевага використання оптимізованих профілів руху демонструється шляхом порівняння обробки в профілях руху автомобіля та літака.
Установка для випробувань автомобілів
Обладнання, що тестується
| Ім'я | Опис | Перевірка домашнього завдання | Серійний номер | Версія прошивки |
|---|---|---|---|---|
| ЄС № 1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| ЄС № 2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Оцінено за дорученням | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-бета |
Для всіх випробувань параметри установки (нерівномірність розміщення, довжина важеля тощо) були відомі заздалегідь або з креслень САПР, або з попередніх калібрувань.
Зверніть увагу, що хоча обидва зразки для випробувань — це Quanta Micro, висновки цього протоколу випробувань повністю стосуються і Ekinox Micro: це посилена версія Quanta Micro працює абсолютно так само. Це підтверджено результатами низки ретельних внутрішніх порівнянь.
Орієнтовна траєкторія
Джерелом даних, що використовується для оцінки похибок роботи, є оброблена в Qinertia тісно пов’язана траєкторія, дані для якої надходять від IMU SBG Systems IMU максимальна продуктивність на основі FOG), а також від одометрів Navsight і Pegasem, встановлених на борту транспортного засобу разом з об’єктом тестування (EUT). Для постобробки використовувалася версія Qinertia 3.2.881-stable.
| Ім'я | Опис | Точність позиціонування | Точність налаштування | Точність курсу |
|---|---|---|---|---|
| Navsight | INS на основі FOG | 0,01 м (0,01 м за 10 секунд) (0,05 м за 60 секунд) | 0,004° (0,004° за 10 с) (0,005° за 60 с) | 0,008° (0,008° за 10 с) (0,010° за 60 с) |
Дві GNSS моделі VSP6037L, що забезпечують сигнал для Navsight, використовуються спільно з об’єктом випробувань (див. схему випробувальної установки).
Аналіз апостеріорних даних показує, що показники якості (оцінювачі стандартного відхилення положення та орієнтації) обробленої траєкторії Horizon цілком дозволяють використовувати її як еталон щодо об’єкта тестування (EUT).
Кожна з трьох встановлених на борту INS була перенесена в одну точку, щоб забезпечити можливість прямого порівняння.
Базова станція
Усі операції з використанням PPK та RTK виконувалися з використанням єдиної базової станції — станції SBG, яка встановлена на даху SBG Systems компанії SBG Systems і входить до складу IGN RGP, французької мережі CORS.
SBGS забезпечує відстеження всіх GNSS (GPS + GLONASS + GALILEO + BEIDOU). Усі чотири системи використовувалися для роботи в режимі RTK у реальному часі.
Тестовий автомобіль
Випробувальний автомобіль — це SBG Systems фургон SBG Systems , оснащений нашим стандартним обладнанням, як показано на наведеній нижче схемі компонування.

Відстань між обома GNSS становить приблизно 2 м, і більшість параметрів установки відомі з особливо високою точністю.
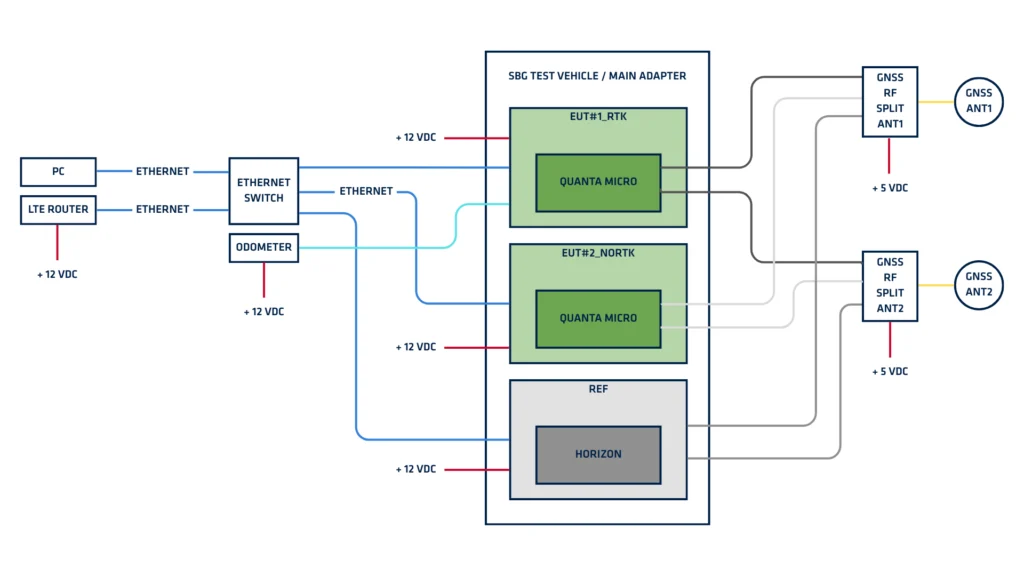
Конфігурація EUT
Обладнання, що тестується (EUT), було налаштоване для вимірювань у режимі реального часу наступним чином:
- EUT1: GNSS усіма 4 супутниковими системами, RTK та підтримкою одометра.
- EUT2: GNSS усіма 4 супутниковими системами, без RTK, без використання даних одометра.
Результати випробувань автомобілів
Автомобільні випробування передбачають фазу прогрівання, і всі статистичні показники було розраховано з урахуванням цього фактора.
Цей вибір у більшості випадків має негативний вплив на більшість показників, особливо на heading , які дуже швидко зменшуються протягом перших 5–10 хвилин місії і де високі значення мають значний вплив на стандартне відхилення та середньоквадратичне відхилення.
Крім того, ми обчислили статистику для режимів без RTK, RTK та PPK з двома антенами, які найкраще відображають автомобільні профілі, навмисно включивши всі три частини місії: відкрите небо, середні та суворі GNSS . Цей вибір також має негативний вплив на більшість показників.
Ці два вибори роблять значення песимістичними. Однак вони демонструють, що Quanta Micro щеMicro з особливо високою продуктивністю відразу після фази вирівнювання (навіть якщо розігрів неможливий) і доводять надійністьMicro Quanta Micro , які здатні майже відповідати технічним характеристикам продукту навіть у тестовому середовищі, набагато суворішому, ніж зазначено.
Сценарії в режимі реального часу
Ці INS працювати в режимі реального часу, забезпечуючи навігаційне рішення з високою частотою та низькою затримкою як з RTK-поправками, так і без них. У наведених нижче таблицях і на рисунках представлено детальні результати вимірювань в режимі реального часу для обох випробуваних пристроїв за таких умов.
- профіль руху автомобіля
- використання даних одометра для EUT № 1 (RTK), відсутність використання даних одометра для EUT № 2 (без RTK)
- зheading GNSS heading подвійної антени
| EUT#1 (RTK + odo) | EUT#2 (без RTK, без одометра) | |||
|---|---|---|---|---|
| Помилка | 68% | 95% | 68% | 95% |
| 2D-позиція | 0.021m | 0.246m | 1.155m | 2.734m |
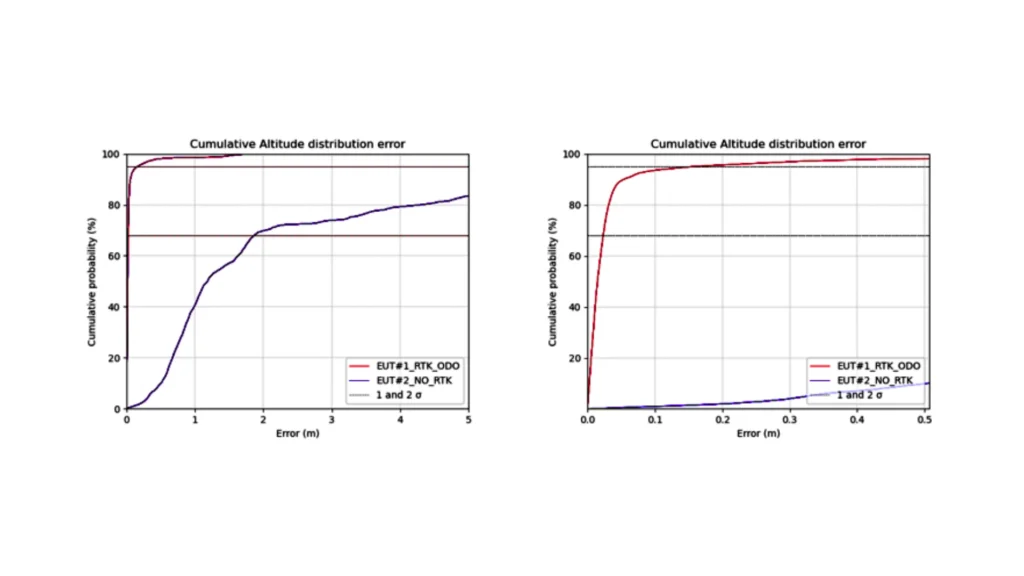
| Вертикальне положення | 0.023m | 0.157m | 1.865m | 7.329m |
| Крен / Тангаж | 0.011° | 0.026° | 0.015° | 0.035° |
| Відхилення | 0.060° | 0.140° | 0.078° | 0.190° |
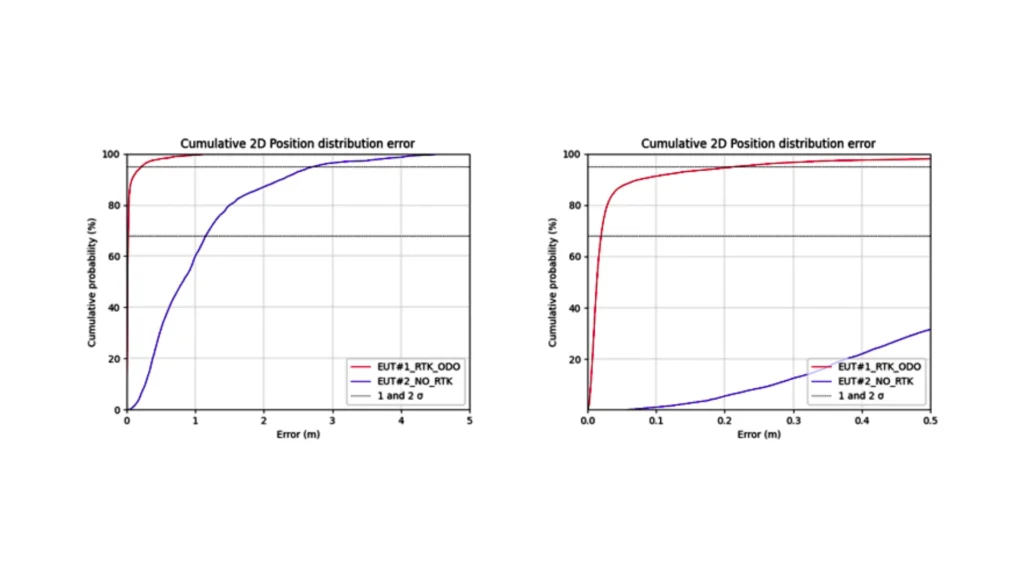
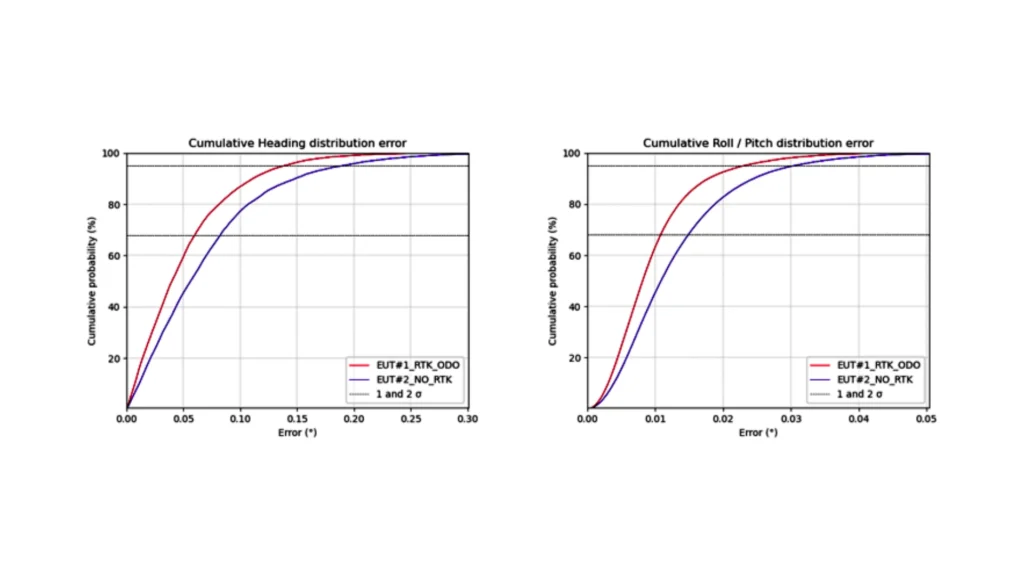
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Сценарії з подальшою обробкою
У цих сценаріях оцінюється максимальна продуктивність, якої можна досягти за допомогою програмного забезпечення для постобробки Qinertia в режимі об'єднаних обчислень TC (прямий + зворотний), а також порівнюється вплив профілю руху. Результати, представлені для одного випробуваного зразка (EUT № 2), були майже ідентичними для обох пристроїв.
| Профіль TC Automotive (подвійна антена + одометр) | Профіль літака TC (одна антена) | |||
|---|---|---|---|---|
| Помилка | 68% | 95% | 68% | 95% |
| 2D-позиція | 0.014m | 0.093m | 0.014m | 0.100m |
| Вертикальне положення | 0.008m | 0.032m | 0.008m | 0.034m |
| Крен / Тангаж | 0.011° | 0.032° | 0.011° | 0.032° |
| Відхилення | 0.051° | 0.211° | 0.041° | 0.208° |
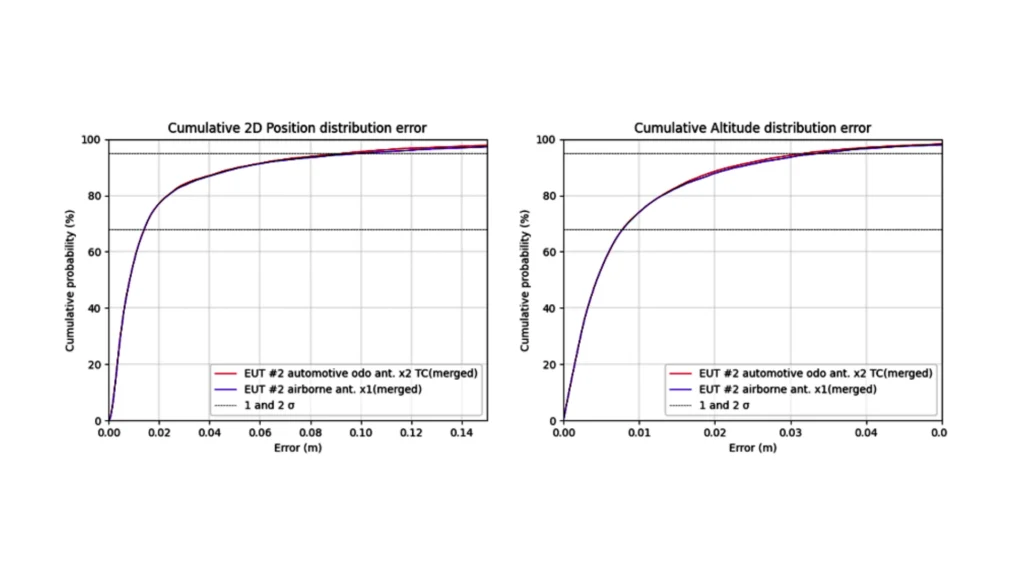
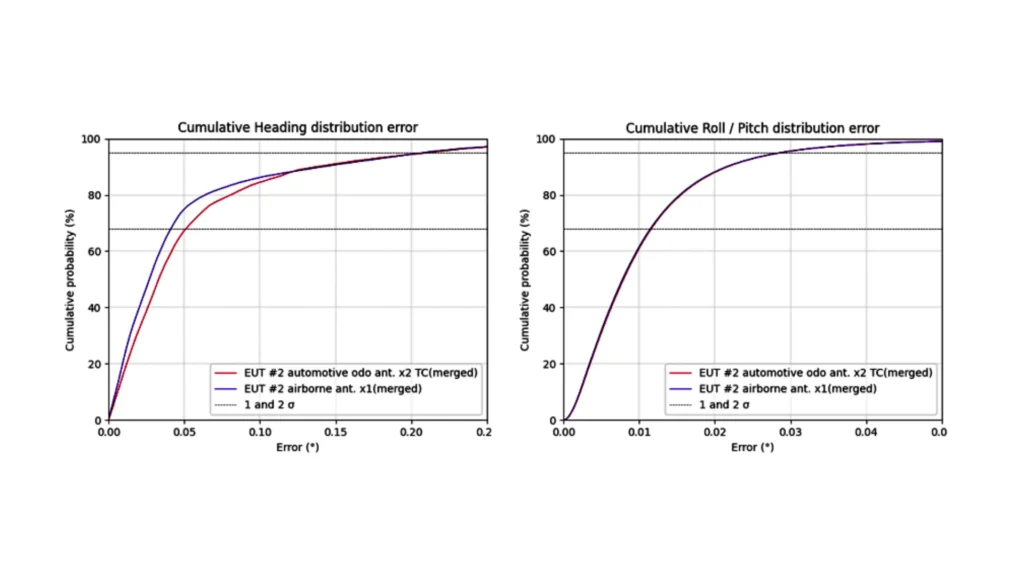
З наведеної вище таблиці та графіків видно, що профіль руху має незначний вплив на продуктивність постобробки.
Незважаючи на те, що GNSS були дуже складними, пристрій працює бездоганно і забезпечує надзвичайно точні результати. Що стосується роботи в режимі реального часу, то обмеження виконання завдань умовами відкритого простору та середньоміського середовища дозволяє отримати результати, які перевищують технічні характеристики пристрою.
Висновок
Випробування та подальший аналіз даних приладів Ekinox Micro Quanta Micro підкреслюють їх високу продуктивність, надійність та точність. Ці системи демонструють виняткову ефективність як у режимі з однією, так і з двома антенами ( GNSS ), навіть у складних умовах.
Ekinox Micro Quanta Micro — це чудовий вибір для додатків, що працюють у режимі реального часу та вимагають стабільного й точного визначення координат та орієнтації. Вони ефективно працюють навіть у складних міських умовах, демонструючи свою надійність.
Крім того, у ситуаціях, де продуктивність у режимі реального часу не є критичною (наприклад, при зйомці LiDAR та фотограмметрії), програмне забезпечення Qinertia SBG Systemsзабезпечує виняткову якість постобробки, підвищуючи точність до сантиметрового рівня навіть у складних GNSS . Це робить поєднання INS Qinertia ідеальним вибором для прямого геореферування та SLAM-технік.
Це дослідження остаточно підтверджує, що Quanta Micro Ekinox Micro для різних застосувань, включаючи ті, що мають суворі вимоги до розміру, ваги та продуктивності.
- Quanta Micro, розроблена як OEM , безперешкодно інтегрується в системи геодезії та об'ємної навігації на безпілотних літальних апаратах.
- Завдяки зручному дизайну та міцності (відповідає стандартам MIL-STD-461 та MIL-STD-1275), Ekinox Micro підходить для легких геодезичних завдань, але найкраще проявляє себе в навігаційних додатках, де надійність має ключове значення.
Для геодезичних завдань, що вимагають більш гнучких параметрів SWaP-C та вищої точності в широкому діапазоні умов, SBG Systems Navsight Quanta Plus, Quanta Extra, Ekinox, Apogee та Navsight . Ці альтернативні рішення, які також повністю сумісні з функціями постобробки Qinertia, забезпечують підвищений рівень продуктивності та є чудовим вибором для завдань, що вимагають максимальної ефективності.
Завантажити звіт у форматі PDF