Ekinox MicroとQuanta Microは都市ナビゲーションの最前線にあり、自動車テストを実施しました。
これらは2つの慣性航法システムであり、戦術的なMEMSベースのIMUとフル機能のRTK GNSS受信機を組み合わせて、驚くほどコンパクトなフォームで比類のないパフォーマンスを提供します。
無人地上/航空/海上車両、屋内マッピング、さらにはUAV測量など、厳格なSWaP制約のあるアプリケーション向けに特別に調整されています。
この包括的なパフォーマンス評価記事は、Quanta Microの商用導入を見越して、2022年7月に実施された徹底的なテストに基づいています。このレポートを通じて、システムの動的パフォーマンスが実証されています。
センサーは、オープンな空、中程度の都市部、都市の峡谷など、さまざまなGNSS環境で広範囲にテストされました。その結果、一貫して卓越したデータ品質が示されました。Quanta MicroとEkinox Microはどちらも、困難なシナリオでも、指定されたパフォーマンスを上回りました。
仕様は通常、ウォームアップフェーズ後の通常の陸上条件のような業界標準のシナリオに基づいていますが、テストにはウォームアップフェーズなしの困難な都市条件が含まれていました。
驚くべきことに、Ekinox MicroとQuanta Microはこのテストで優れており、すべての条件で卓越したパフォーマンスを発揮しています。
前提条件
このテストレポートを読むには、慣性航法と後処理の概念に関するある程度の知識が必要です。ナレッジベースは、慣性航法の素晴らしい世界への旅を始めるのに役立ちます。
略語
- CORS: Continuously Operating Reference Stations(継続的稼働基準局)
- DUT: 試験対象デバイス
- EUT:テスト対象機器
- FOG:光ファイバージャイロ
- GNSS:全地球航法衛星システム(GPS + GLONASS + BEIDOU + GALLILEO)
- IGN:Institut Géographique National(フランスの公式地理機関)
- IMU:慣性計測ユニット
- INS: 慣性航法システム
- LiDAR:Light Detection And Ranging
- MEMS:微小電気機械システム
- Merged:Qinertiaを使用した順方向+逆方向の事後処理
- PPK:後処理キネマティック
- RGP:Réseau GNSS Permanent(フランスのCORSネットワーク)
- RMS:二乗平均平方根
- RTK:リアルタイムキネマティック
- Std: 標準偏差
- SWaP-C:サイズ、重量、消費電力 – コスト
- TC:Tight Coupling(タイトカップリング)
- UAV:Unmanned Aerial Vehicle(無人航空機)
試験ミッションの目的と仕様
ミッションの計画と実行
このテストは、2022年7月7日にSBG Systemsのテスト車両に搭載して実施されました。SBG Systemsの施設周辺で、晴天の条件下、115分間の走行テストでした。走行場所は以下の通りです。
- 開けた場所での連続動作45分
- 準密集した都市環境下で35分間の連続運用。
- トンネルを含む過酷な都市環境下で35分間の連続運用。

環境の複雑さを考慮し、衛星の可視性に関して有利な時間帯を選択するためのミッションプランニングは特に行われていません。
ミッションの目標
このミッションは、Quanta MicroとEkinox Micro INSが実際のシナリオでどのように動作するかを実証するために特別に設計されました。これにより、INSが仕様を満たしている(そしてそれを超えている)ことを検証できるだけでなく、最も困難なGNSS条件下でも優れた性能を発揮することを実証できました。
ミッション中、Quanta Microのリアルタイム性能を測定するデータを収集しました。その後、同じデータセットの事後処理(PPK)を実行しました。
これにより、自動車環境におけるQuanta Micro INSの性能を完全に把握できます。また、程度は低いですが、他のアプリケーション(特定のテストレポートの対象となる)についても把握できます。
最適化されたモーションプロファイルを使用する利点は、自動車および航空機のモーションプロファイルでの処理を比較することで実証されます。
自動車試験のセットアップ
試験対象機器
| 名前 | 説明 | HWリビジョン | シリアルナンバー | ファームウェアバージョン |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| プロキシによる評価 | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
すべてのテストにおいて、設置パラメータ(ミスアライメント、レバーアームなど)は、CAD図面または以前のキャリブレーションから既知でした。
両方のEUTがQuanta Microであることに留意してください。このテストレポートの内容は、Ekinox Microにも完全に適用できます。Ekinox MicroはQuanta Microの堅牢版であり、まったく同じように動作します。綿密な内部比較により、この主張が確認されています。
基準軌道
性能誤差の評価に使用した参照データは、Qinertiaで処理された強結合軌道データであり、そのデータは、被試験機(EUT)とともに車両にオドメーター SBG Systems IMU FOGベースの最高性能)、Navsight、オドメーター 取得されたものである。後処理に使用したQinertiaのバージョンは3.2.881-stableであった。
| 名前 | 説明 | 位置精度 | 姿勢精度 | ヘディング精度 |
|---|---|---|---|---|
| Navsight Horizon | FOGベースのINS | 0.01m (@10秒で0.01m) (@60秒で0.05m) | 0.004° (0.004° @ 10秒) (0.005° @ 60秒) | 0.008° (0.008° @ 10秒) (0.010° @ 60秒) |
Navsight-Sに接続されている2つのVSP6037L GNSSアンテナは、EUTと共有されています(テストセットアップ図を参照)。
事後データ分析から、事後処理されたHorizon軌道の品質指標(位置および姿勢の標準偏差推定量)により、後者をEUTに関するリファレンスとして完全に使用できます。
搭載された3つのINSの位置はそれぞれ、直接比較できるように共通のポイントに転送されています。
基地局
すべてのPPKおよびRTK操作は、SBG Systemsの施設屋上に設置され、フランスのCORSネットワークであるIGN RGPに含まれている、SBG’Sステーションという単一の基地局を使用して実行されました。
SBGSは、完全なGNSSコンステレーション追跡(GPS + GLONASS + GALILEO + BEIDOU)を提供します。リアルタイムRTK操作には、4つすべてのコンステレーションが使用されました。
試験車両
テスト車両はSBG Systems専用のバンで、以下のセットアップ図に示すように、標準的な機器が搭載されています。

両方のGNSSアンテナ間のベースラインは約2 mで、ほとんどの設置パラメータは非常に高い精度でわかっています。
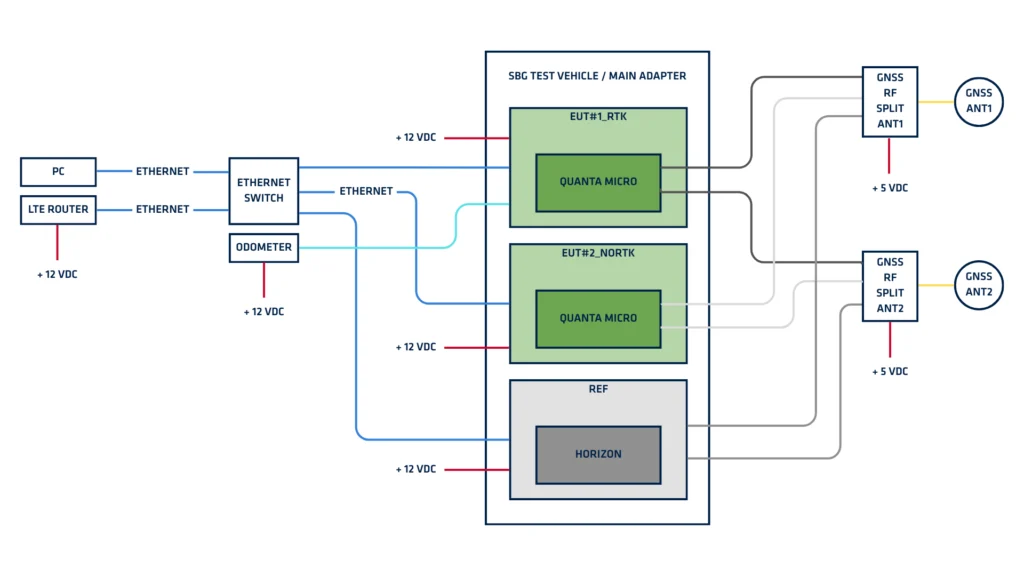
EUT構成
テスト対象機器(EUT)は、リアルタイム測定のために次のように構成されました。
- EUT1:4つの衛星システムすべてGNSS 、RTKおよびオドメーター 。
- EUT2:4つの衛星システムすべてGNSS 。RTK非対応、オドメーター なし。
自動車試験の結果
自動車テストにはウォームアップフェーズが含まれており、すべての統計はその意図的な包含によって計算されています。
この選択は、ほとんどの場合、特にミッションの最初の5〜10分で非常に速く減少し、高い値がstdおよびRMSに大きな影響を与える見出し誤差にとって、ほとんどの数値に悪影響を及ぼします。
さらに、オープンスカイ、中程度、および過酷なGNSS環境の3つのミッションパーツすべてを意図的に含めることにより、自動車プロファイルを最もよく表す、RTKなし、RTK、およびPPKデュアルアンテナ統計を計算しました。この選択もほとんどの数値に悪影響を及ぼします。
これらの2つの選択により、値は悲観的に見えます。ただし、Quanta Microは、アライメントフェーズからすぐに(ウォームアップが不可能であっても)特に優れたパフォーマンスで使用でき、指定されたよりもはるかに困難なテスト環境でも製品のパフォーマンス仕様をほぼ満たすことができるQuanta Microアルゴリズムの堅牢性を証明しています。
リアルタイムシナリオ
これらのINSは、リアルタイムで機能し、RTK補正の有無にかかわらず、高頻度で低遅延のナビゲーションソリューションを提供できます。以下の表と図は、以下の条件下での両方のEUTの詳細なリアルタイムの結果を示しています。
- 自動車のモーションプロファイル
- EUT #1(RTK)にはオドメーター 、EUT #2(非RTK)にはオドメーター なし
- デュアルアンテナGNSSヘディング入力付き
| EUT#1 (RTK + odo) | EUT#2 (RTKなし、odoなし) | |||
|---|---|---|---|---|
| エラー | 68% | 95% | 68% | 95% |
| 2D位置 | 0.021m | 0.246m | 1.155m | 2.734m |
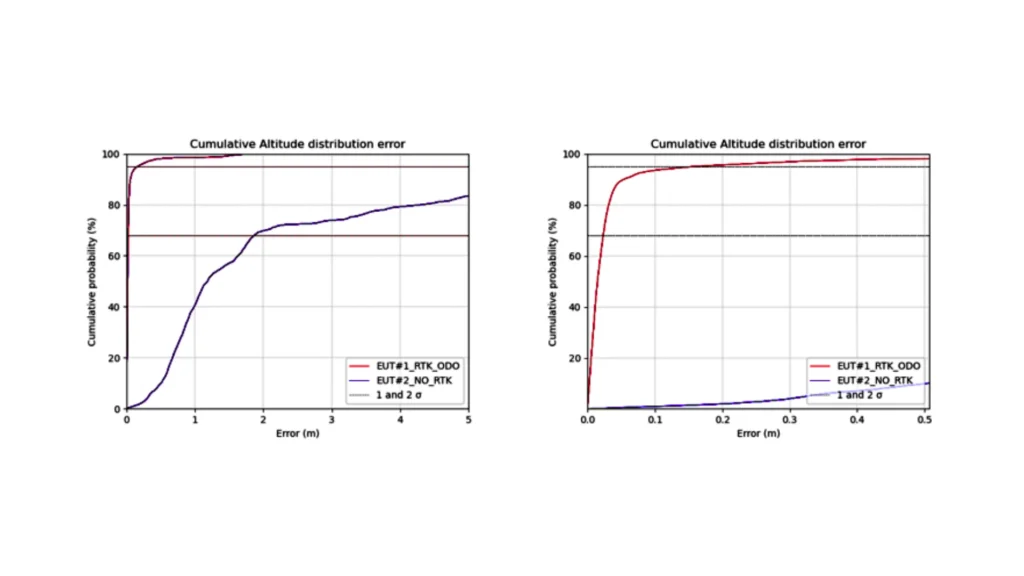
| 垂直方向位置 | 0.023m | 0.157m | 1.865m | 7.329m |
| ロール / ピッチ | 0.011° | 0.026° | 0.015° | 0.035° |
| ヨー(Yaw) | 0.060° | 0.140° | 0.078° | 0.190° |
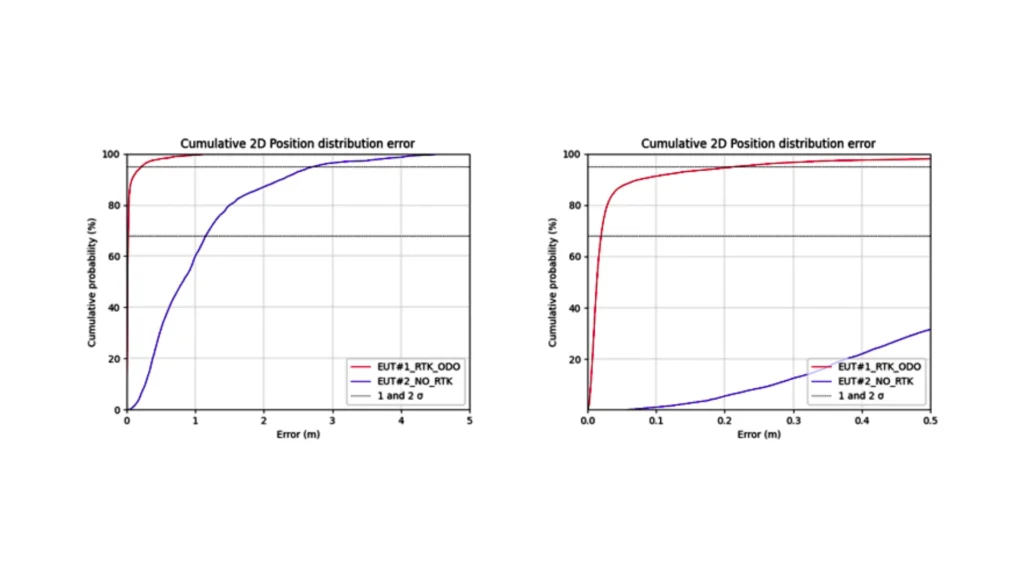
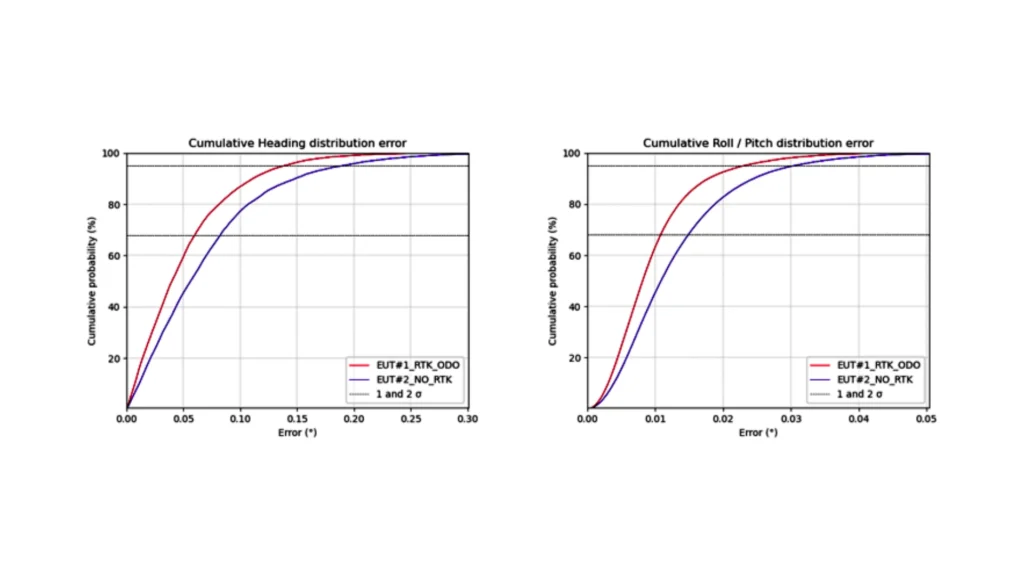
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
後処理シナリオ
これらのシナリオでは、TC merged(順方向+逆方向)計算モードでQinertia事後処理ソフトウェアで達成可能な製品の究極の性能を評価し、モーションプロファイルの影響を比較します。単一のEUT(EUT#2)に表示される結果は、両方のユニットでほぼ同じでした。
| TC 自動車プロファイル (デュアルアンテナ + 走行距離計) | TC 航空機プロファイル (シングルアンテナ | |||
|---|---|---|---|---|
| エラー | 68% | 95% | 68% | 95% |
| 2D位置 | 0.014m | 0.093m | 0.014m | 0.100m |
| 垂直方向位置 | 0.008m | 0.032m | 0.008m | 0.034m |
| ロール / ピッチ | 0.011° | 0.032° | 0.011° | 0.032° |
| ヨー(Yaw) | 0.051° | 0.211° | 0.041° | 0.208° |
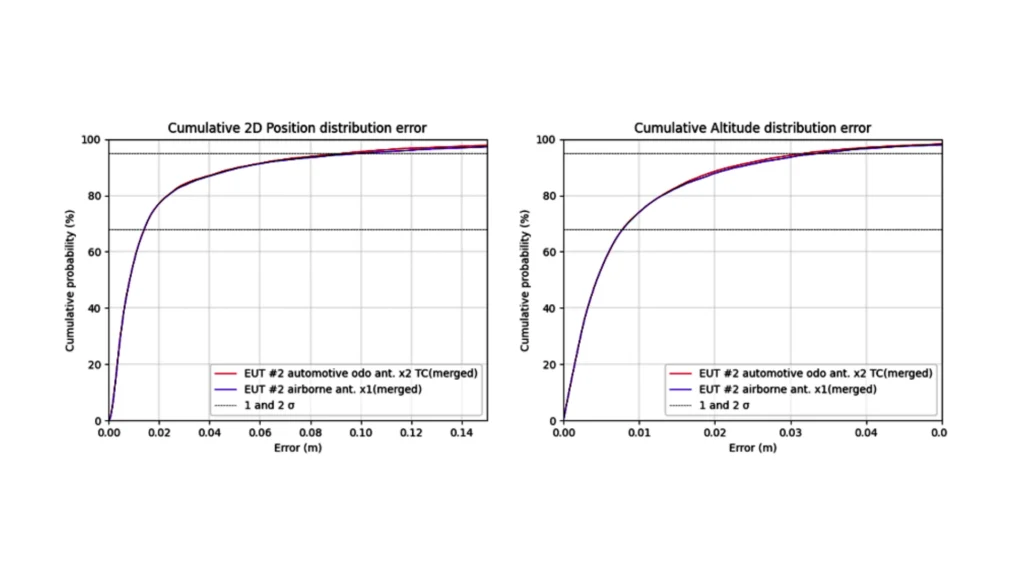
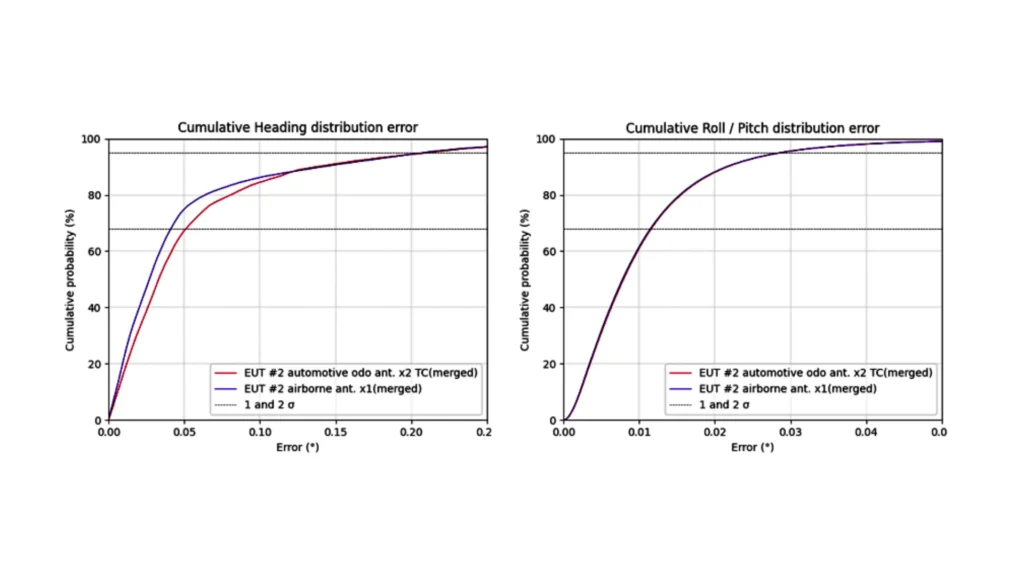
前述の表とプロットは、モーションプロファイルが後処理のパフォーマンスに与える影響はわずかであることを示しています。
GNSS環境は非常に困難でしたが、製品は非常にうまく動作し、非常に正確な結果を生成します。リアルタイムと同様に、ミッションをオープンスカイおよび中程度の都市環境に制限すると、製品仕様よりも優れた結果が得られます。
結論
Ekinox MicroおよびQuanta Microのテストとそれに続くデータ分析は、その強力な機能、信頼性、および精度を浮き彫りにしています。これらのシステムは、単一アンテナモードとデュアルアンテナモード(RTK GNSS受信機)の両方で、困難な環境下でも非常に優れた性能を発揮します。
Ekinox MicroおよびQuanta Microは、安定した高精度な測位と姿勢決定が求められるリアルタイムアプリケーションに最適な選択肢です。これらは、要求の厳しい都市環境でも効果的に機能し、その堅牢性を示しています。
さらに、リアルタイム性能が重要ではないシナリオ(LiDAR測量や写真測量など)では、SBG SystemsのQinertiaソフトウェアが優れた後処理を提供し、困難なGNSS環境下でも性能をセンチメートルレベルの精度にまで向上させます。これにより、INSとQinertiaの組み合わせは、ダイレクトジオレファレンシングやSLAM技術に最適な選択肢となります。
この研究は、Quanta MicroとEkinox Microが、厳格なサイズ、重量、および性能要件を伴うものを含む、様々な用途に適していることを決定的に検証しています。
- OEMソリューションとして設計されたQuanta Microは、UAV測量および体積ナビゲーションアプリケーションにシームレスに統合できます。
- 使いやすい設計と堅牢性(MIL-STD-461およびMIL-STD-1275に準拠)を備えたEkinox Microは、軽測量アプリケーションに適していますが、堅牢性が重要なナビゲーションアプリケーションで最高の性能を発揮します。
より柔軟なSWaP-Cパラメータと、幅広い条件下でより高い精度を必要とする測量タスクのために、SBG SystemsはQuanta Plus、Quanta Extra、Ekinox、Apogee、およびNavsight製品を提供しています。これらの代替製品もQinertiaの後処理機能と完全に互換性があり、高度な性能レベルを提供し、最高の性能を必要とするアプリケーションに最適なオプションとして役立ちます。
PDFレポートをダウンロード