Ekinox Micro 和 Quanta Micro 处于城市导航的最前沿,我们已对它们进行了汽车测试。
它们是两个惯性导航系统,结合了基于战术 MEMS 的 IMU 和功能齐全的 RTK GNSS 接收器,可在惊人的紧凑外形内提供无与伦比的性能。
专为具有严格 SWaP 约束的应用量身定制,例如无人地面/空中/海上车辆、室内测绘,甚至 UAV 测量。
这篇全面的性能评估文章基于 2022 年 7 月执行的一项详尽测试,旨在验证 Quanta Micro 在商业推出之前的能力。通过本报告,展示了系统的动态性能。
这些传感器在各种 GNSS 环境中进行了广泛的测试,包括开阔天空、中等城市区域和城市峡谷。结果始终显示出卓越的数据质量。即使在具有挑战性的场景中,Quanta Micro 和 Ekinox Micro 都超过了其指定的性能。
虽然这些规格通常基于行业标准场景,例如热身阶段后的常规陆地条件,但该测试包括没有热身阶段的困难城市条件。
值得注意的是,Ekinox Micro 和 Quanta Micro 在此测试中表现出色,在所有条件下都表现出卓越的性能。
先决条件
阅读这些测试报告需要具备一定的惯性导航和后处理概念知识。我们的知识库将帮助您开启精彩的惯性导航之旅。
缩略语
- CORS:持续运行参考站
- DUT:被测设备
- EUT:被测设备
- FOG:光纤陀螺仪
- GNSS:全球导航卫星系统(GPS + GLONASS + BEIDOU + GALLILEO)
- IGN:法国国家地理研究所(法国官方地理机构)
- IMU:惯性测量单元
- INS:惯性导航系统
- LiDAR:激光探测与测距
- MEMS:微机电系统
- Merged:使用 Qinertia 进行前向 + 后向后处理
- PPK:后处理动态定位
- RGP:Réseau GNSS Permanent(法国国家 CORS 网络)
- RMS:均方根
- RTK:实时动态定位
- Std:标准差
- SWaP-C:尺寸、重量和功耗 – 成本
- TC:紧耦合
- 无人机:无人飞行器
测试任务目标和规范
任务规划与执行
该测试于 2022 年 7 月 7 日在 SBG Systems 测试车辆上进行。这是一次 115 分钟的驾驶,在晴朗的天气条件下,在 SBG Systems 设施附近,包括:
- 在开阔天空条件下,可连续运行 45 分钟。
- 在半密集城市环境下,可连续运行35分钟。
- 在恶劣的城市环境中(包括隧道)连续运行35分钟。

考虑到环境的复杂性,在任务规划中没有特别注意选择一天中卫星可见的有利时间。
任务目标
此任务专门用于演示 Quanta Micro 和 Ekinox Micro INS 在实际场景中的表现。这使我们能够验证 INS 是否满足(并超过)其规格,而且还证明了即使在最困难的 GNSS 条件下,它们也具有出色的性能。
在任务期间,我们收集了测量 Quanta Micro 实时性能的数据;然后,我们对相同的数据集执行了后处理 (PPK)。
这使我们能够全面了解 Quanta Micro INS 在汽车环境中的性能;并在较小程度上了解其他应用(这是特定测试报告的主题)。
通过比较汽车和飞机运动配置文件中的处理,可以证明使用优化的运动配置文件的优势。
汽车测试设置
被测设备
| 名称 | 描述 | HW版本 | 序列号 | 固件版本 |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| 通过代理评估 | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
对于所有测试,安装参数(不对中、力臂等)都是事先已知的,这些参数或者来自CAD图纸,或者来自之前的校准。
请记住,尽管两个 EUT 都是 Quanta Micro,但本测试报告的内容完全适用于 Ekinox Micro:它是 Quanta Micro 的坚固版本,并且行为方式完全相同。一系列细致的内部比较已经证实了这一断言。
参考轨迹
用于评估性能误差的参考源是 Qinertia 处理的紧耦合轨迹,数据来自 SBG Systems Horizon IMU(基于 FOG 的卓越性能)、Navsight-S 和安装在车辆上的 Pegasem 里程计以及 EUT。用于后处理的 Qinertia 版本为 3.2.881-stable。
| 名称 | 描述 | 定位精度 | 姿态精度 | 航向精度 |
|---|---|---|---|---|
| Navsight Horizon | 基于 FOG 的 INS | 0.01m (0.01m @ 10s) (0.05m @ 60s) | 0.004° (0.004° @ 10 秒) (0.005° @ 60 秒) | 0.008° (0.008° @ 10秒) (0.010° @ 60秒) |
为 Navsight-S 提供信号的两个 VSP6037L GNSS 天线与 EUT 共享(参见测试设置图)。
通过后验数据分析,后处理 Horizon 轨迹的质量指标(位置和姿态标准差估计量)完全允许后者用作相对于 EUT 的参考。
已将安装在船上的三个 INS 位置中的每一个都转移到公共点,以便进行直接比较。
基站
所有 PPK 和 RTK 操作都是使用单个基站执行的,该基站是 SBG 的基站,安装在 SBG Systems 设施的屋顶上,并包含在 IGN RGP(法国 CORS 网络)中。
SBGS 提供完整的 GNSS 星座跟踪(GPS + GLONASS + GALILEO + BEIDOU)。所有四个星座都用于实时 RTK 操作。
测试车辆
测试车辆是 SBG Systems 专用面包车,配备了我们的标准设备,如下面的设置图所示。

两个 GNSS 天线之间的基线约为 2 米,并且大多数安装参数都以特别好的精度已知。
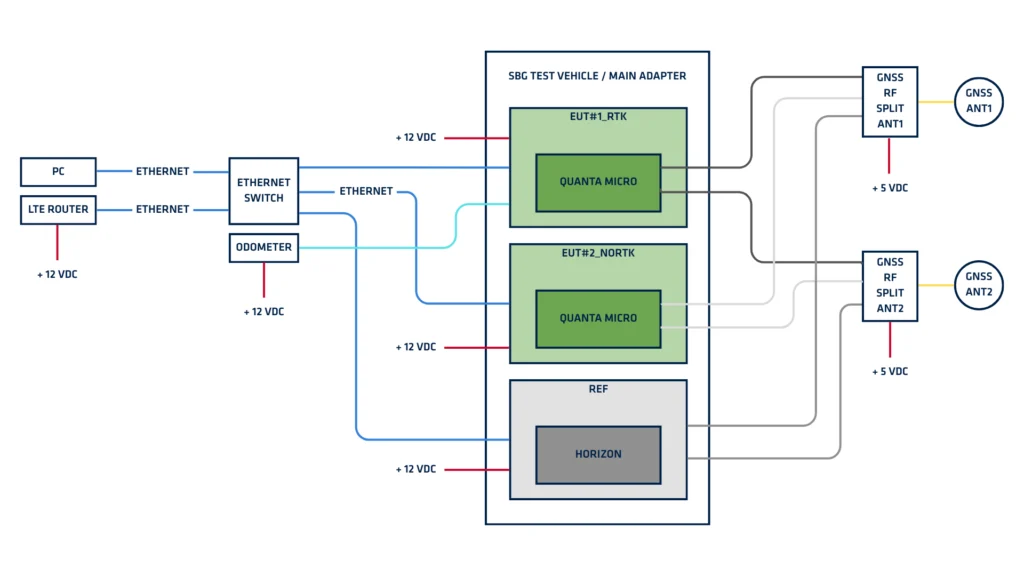
EUT 配置
被测设备 (EUT) 配置如下,用于实时测量:
- EUT1:GNSS 具有所有 4 个星座、RTK 和里程计辅助。
- EUT2:GNSS 具有所有 4 个星座,无 RTK,无里程计辅助。
汽车测试结果
汽车测试包括预热阶段,并且所有统计数据都是在其有目的的包含下计算的。
在大多数情况下,这种选择对大多数数据都有负面影响,尤其是对于航向误差,航向误差在任务的前 5-10 分钟内非常快地减小,并且高值对 std 和 RMS 有显着影响。
此外,我们通过有意包含所有三个任务部分:开阔天空、中等和恶劣的 GNSS 环境,计算了最能代表汽车配置文件的无 RTK、RTK 和 PPK 双天线统计数据。这种选择也对大多数数据有负面影响。
这两个选择使这些值看起来很悲观。但是,它们表明 Quanta Micro 在校准阶段后仍然可用,并且具有特别好的性能(即使不可能进行预热),并证明了 Quanta Micro 算法的稳健性,即使在比指定更困难的测试环境中,该算法也几乎能够满足产品性能规范。
实时场景
这些 INS 能够实时运行,提供高频率、低延迟的导航解决方案,无论有无 RTK 校正。下表和图表提供了以下条件下 EUT 的详细实时结果。
- 汽车运动剖面
- EUT #1(RTK)的里程计辅助,EUT #2(无 RTK)的无里程计辅助
- 具有双天线 GNSS 航向精度输入
| EUT#1 (RTK + 测程计) | EUT#2 (无 RTK,无计程仪) | |||
|---|---|---|---|---|
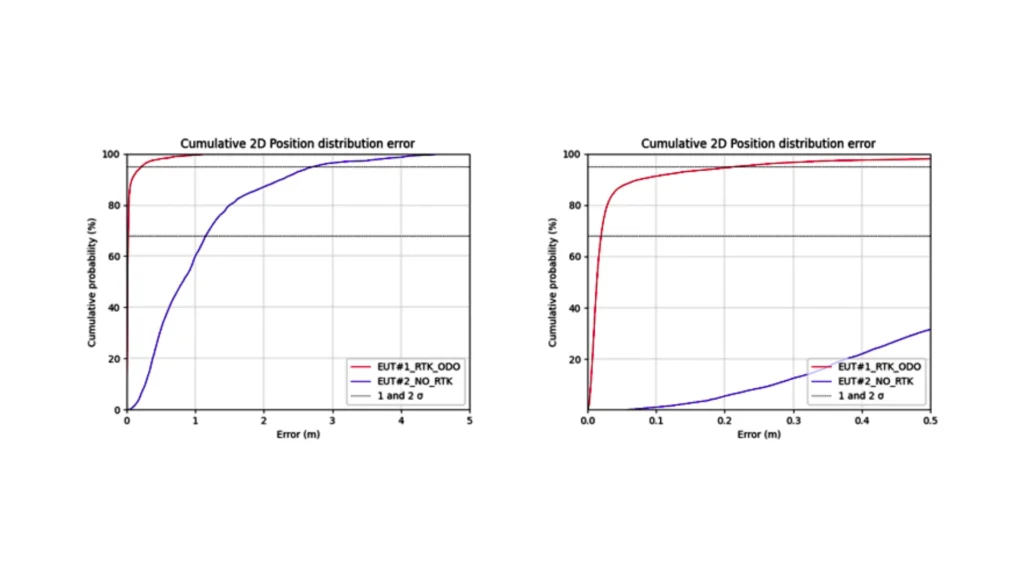
| 错误 | 68% | 95% | 68% | 95% |
| 2D 位置 | 0.021m | 0.246m | 1.155m | 2.734m |
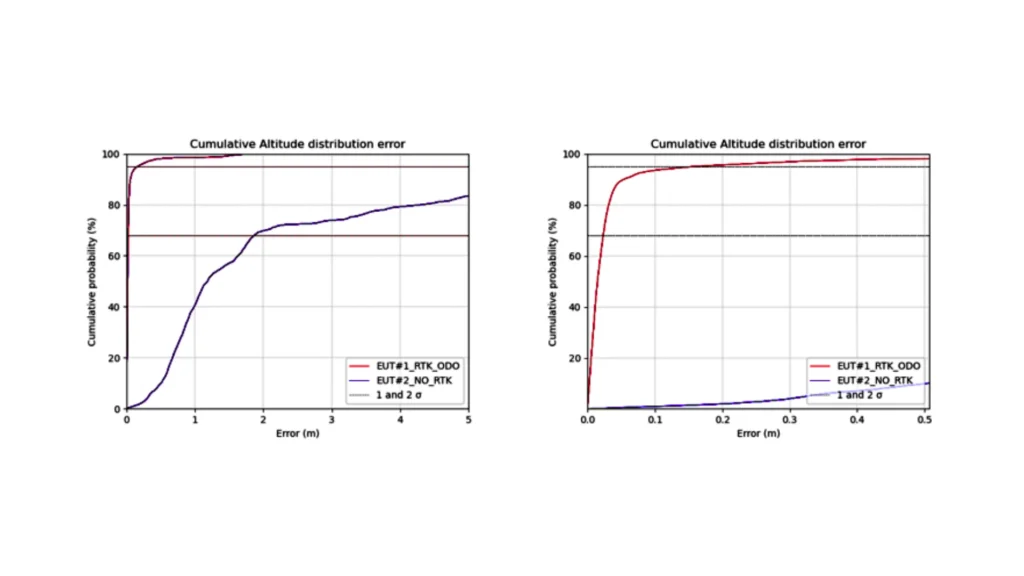
| 垂直位置 | 0.023m | 0.157m | 1.865m | 7.329m |
| 横滚 / 俯仰 | 0.011° | 0.026° | 0.015° | 0.035° |
| 芭芭角 | 0.060° | 0.140° | 0.078° | 0.190° |
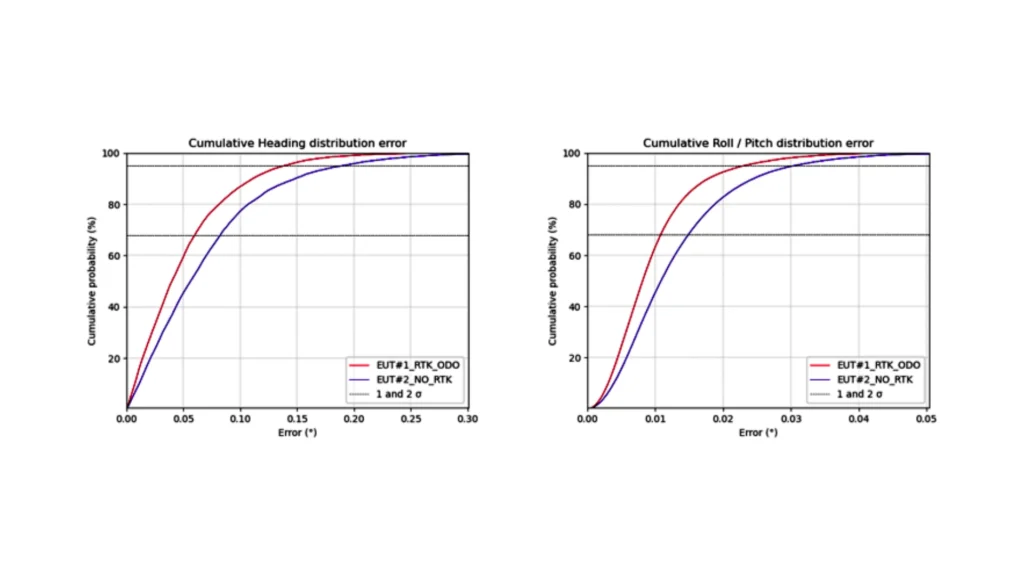
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
后处理场景
这些场景评估了产品在 TC 合并(正向 + 反向)计算模式下使用 Qinertia 后处理软件可实现的最终性能,并比较了运动剖面的影响。针对单个 EUT(EUT #2)显示的结果,两个单元的结果几乎相同。
| TC 汽车模式 (双天线 + 测距仪) | TC 飞机剖面 (单天线 | |||
|---|---|---|---|---|
| 错误 | 68% | 95% | 68% | 95% |
| 2D 位置 | 0.014m | 0.093m | 0.014m | 0.100m |
| 垂直位置 | 0.008m | 0.032m | 0.008m | 0.034m |
| 横滚 / 俯仰 | 0.011° | 0.032° | 0.011° | 0.032° |
| 芭芭角 | 0.051° | 0.211° | 0.041° | 0.208° |
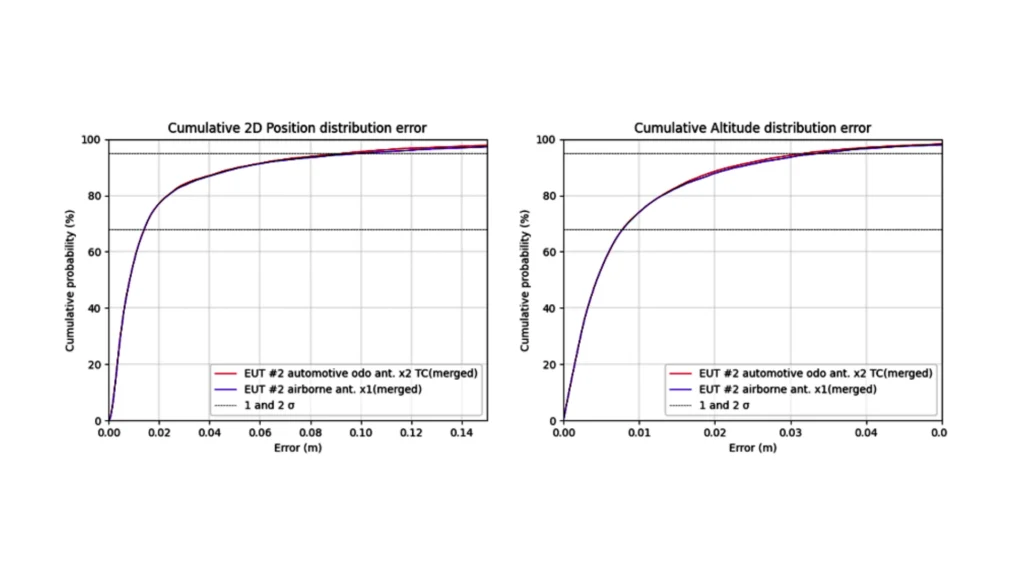
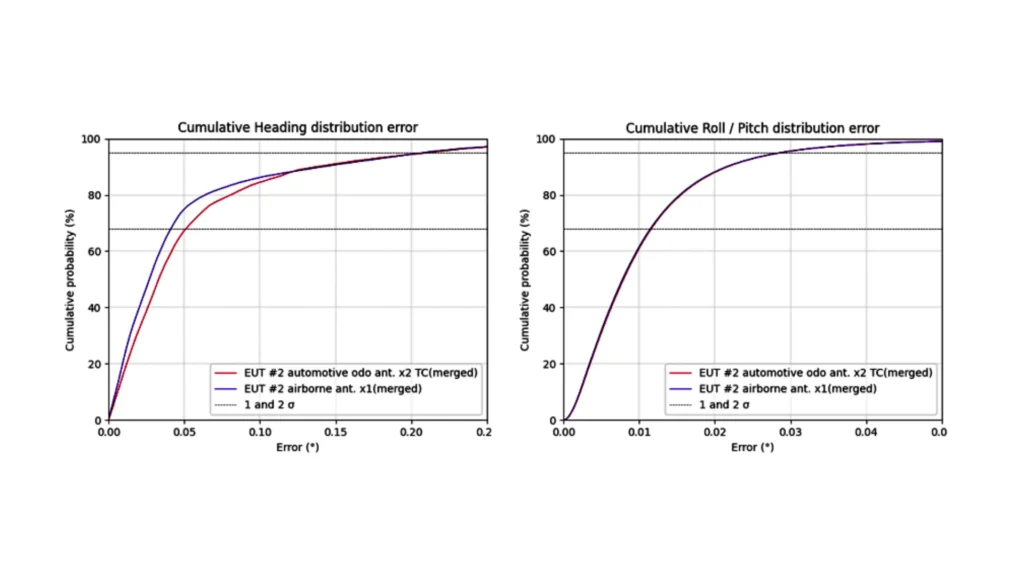
前面的表格和图表表明,运动曲线对后处理性能的影响很小。
即使 GNSS 环境非常恶劣,该产品也能表现良好,并产生非常准确的结果。至于实时性,将任务限制在开阔天空和中等城市环境中,可以获得优于产品规格的结果。
结论
Ekinox Micro 和 Quanta Micro 的测试及后续数据分析突显了其强大的能力、可靠性和精度。这些系统在单天线和双天线模式(RTK GNSS 接收机)下均表现出色,即使在严苛环境中也是如此。
Ekinox Micro 和 Quanta Micro 是需要稳定精确的定位和姿态确定的实时应用的绝佳选择。即使在严苛的城市环境中,它们也能有效工作,展现了其强大的鲁棒性。
此外,在实时性能不关键的场景(例如激光雷达测量和摄影测量)中,SBG Systems 的 Qinertia 软件提供卓越的后处理能力,即使在具有挑战性的 GNSS 环境中也能将性能提升至厘米级精度。这使得 INS 和 Qinertia 的结合成为直接地理参考和 SLAM 技术的完美选择。
这项研究最终证实,Quanta Micro 和 Ekinox Micro 适用于各种应用,包括那些对尺寸、重量和性能有严格要求的应用。
- Quanta Micro 设计为 OEM 解决方案,可无缝集成到 UAV 测量和体积导航应用中。
- 凭借其用户友好的设计和坚固性(符合 MIL-STD-461 和 MIL-STD-1275 标准),Ekinox Micro 适用于轻型测量应用,但在稳健性是关键的导航应用中表现最佳。
对于需要在各种条件下实现更灵活的 SWaP-C 参数和更高精度的测量任务,SBG Systems 提供 Quanta Plus、Quanta Extra、Ekinox、Apogee 和 Navsight 产品。这些替代方案也与 Qinertia 的后处理功能完全兼容,可提供更高的性能水平,并且是需要最高性能的应用的绝佳选择。
下载 PDF 报告