Ekinox Micro et Quanta Micro sont à l'avant-garde de la navigation urbaine, et nous les avons soumis à des tests automobiles.
Ce sont deux systèmes de navigation inertielle, combinant une IMU tactique basée sur la technologie MEMS et des récepteurs GNSS RTK complets pour offrir des performances inégalées dans un format étonnamment compact.
Spécialement conçus pour les applications avec des contraintes SWaP strictes comme les véhicules terrestres/aériens/maritimes sans pilote, la cartographie intérieure et même les levés par drone.
Cet article d'évaluation complète des performances est basé sur un test exhaustif réalisé en juillet 2022 pour valider les capacités de Quanta Micro en prévision de son lancement commercial. Grâce à ce rapport, les performances dynamiques des systèmes sont démontrées.
Les capteurs ont été testés de manière approfondie dans divers environnements GNSS, notamment à ciel ouvert, dans des zones urbaines moyennes et dans des canyons urbains. Les résultats ont constamment montré une qualité de données exceptionnelle. Quanta Micro et Ekinox Micro ont tous deux dépassé leurs performances spécifiées, même dans des scénarios difficiles.
Alors que les spécifications sont généralement basées sur le scénario standard de l'industrie, comme des conditions terrestres régulières après une phase de chauffe, le test comprenait des conditions urbaines difficiles sans phase de chauffe.
Remarquablement, Ekinox Micro et Quanta Micro ont excellé dans ce test, démontrant des performances exceptionnelles dans toutes les conditions.
Prérequis
La lecture de ces rapports d'essais nécessite un certain niveau de connaissance de la navigation inertielle et des concepts de post-traitement. Notre base de connaissances vous aidera à démarrer votre voyage dans le monde merveilleux de la navigation inertielle.
Acronymes
- CORS : Stations de référence à fonctionnement continu
- DUT : Dispositif testé
- EUT : Équipement testé
- FOG : Gyroscope à fibre optique
- GNSS : Global Navigation Satellite Systems (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN : Institut Géographique National (agence géographique officielle française)
- IMU : Inertial Measurement Unit
- INS : Système de Navigation Inertielle
- LiDAR : Light Detection And Ranging (Détection et télémétrie par la lumière)
- MEMS : Micro Electro-Mechanical System
- Fusionné : Post-traitement avant + arrière à l'aide de Qinertia
- PPK : Cinématique post-traitée
- RGP : Réseau GNSS Permanent (réseau national français CORS)
- RMS : Root Mean Square (Racine Carrée Moyenne)
- RTK : Cinématique en temps réel
- Std : Écart type
- SWaP-C: taille, poids, puissance et coût
- TC : Couplage étroit (Tight Coupling)
- UAV : Unmanned Aerial Vehicle (Véhicule aérien sans pilote)
Objectifs et spécifications de la mission de test
Planification et exécution de la mission
Le test a été mené à bord du véhicule de test de SBG Systems le 7 juillet 2022. Il s'agissait d'un trajet de 115 minutes, dans des conditions météorologiques claires, au voisinage des installations de SBG Systems, notamment :
- 45 minutes d'opérations contiguës dans des conditions de ciel ouvert.
- 35 minutes d'opérations continues dans un environnement urbain semi-dense.
- 35 minutes d'opérations continues dans un environnement urbain difficile, y compris des tunnels.

Compte tenu de la complexité de l’environnement, aucune attention particulière n’a été accordée à la planification de la mission afin de sélectionner un moment de la journée favorable à la visibilité des satellites.
Objectifs de la mission
Cette mission a été spécifiquement conçue pour démontrer comment les Quanta Micro et Ekinox Micro INS se comportent dans un scénario réel. Cela nous a permis de valider que les INS respectent (et dépassent) leurs spécifications, mais aussi de démontrer leurs performances exceptionnelles, même dans les conditions GNSS les plus difficiles.
Au cours de la mission, nous avons collecté des données mesurant les performances en temps réel du Quanta Micro ; nous avons ensuite effectué le post-traitement des mêmes ensembles de données (PPK).
Cela nous permet de fournir une vue complète des performances du Quanta Micro INS dans un environnement automobile ; et dans une moindre mesure d'autres applications (qui font l'objet de rapports d'essai spécifiques).
L'avantage d'utiliser des profils de mouvement optimisés est démontré en comparant le traitement dans les profils de mouvement automobile et avion.
Configuration des tests automobiles
Équipement testé
| Nom | Description | Révision HW | Numéro de série | Version du micrologiciel |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Évalué par procuration | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Pour tous les tests, les paramètres d'installation (désalignements, bras de levier, etc.) étaient connus a priori, soit à partir de dessins CAO, soit à partir d'étalonnages précédents.
Gardez à l'esprit que, bien que les deux EUT soient les Quanta Micro, le contenu de ce rapport de test est entièrement applicable à l'Ekinox Micro : il s'agit d'une version renforcée de la Quanta Micro et se comporte exactement de la même manière. Une série de comparaisons internes méticuleuses a confirmé cette affirmation.
Trajectoire de référence
La source de référence utilisée pour évaluer les erreurs de performance est une trajectoire couplée-serrée traitée par Qinertia avec des données provenant de l'IMU SBG Systems Horizon (performance ultime basée sur la technologie FOG), du Navsight-S et de l'odomètre Pegasem installés à bord du véhicule avec l'EUT. La version de Qinertia utilisée pour le post-traitement était la 3.2.881-stable.
| Nom | Description | Précision de la position | Précision de l'attitude | Précision du cap |
|---|---|---|---|---|
| Navsight Horizon | INS à base de FOG | 0,01m (0,01m @ 10s) (0,05m @ 60s) | 0,004° (0,004° @ 10s) (0,005° @ 60s) | 0,008° (0,008° @ 10s) (0,010° @ 60s) |
Les deux antennes GNSS VSP6037L alimentant le Navsight-S sont partagées avec l'EUT (voir le schéma de configuration du test).
À partir de l'analyse des données a posteriori, les indicateurs de qualité (estimateurs de l'écart-type de la position et de l'attitude) de la trajectoire Horizon post-traitée permettent pleinement d'utiliser cette dernière comme référence par rapport à l'EUT.
Chacune des trois positions INS installées à bord a été transférée à un point commun pour permettre des comparaisons directes.
Station de base
Toutes les opérations PPK et RTK ont été effectuées en utilisant une seule base, la station SBG située sur le toit des installations de SBG Systems et incluse dans l'IGN RGP, le réseau CORS français.
SBGS assure le suivi complet des constellations GNSS (GPS + GLONASS + GALILEO + BEIDOU). Les quatre constellations ont été utilisées pour les opérations RTK en temps réel.
Véhicule de test
Le véhicule de test était une camionnette dédiée de SBG Systems, équipée de notre équipement standard tel que présenté dans le schéma de configuration suivant.

La ligne de base entre les deux antennes GNSS est d'environ 2 m et la plupart des paramètres d'installation sont connus avec une très bonne précision.
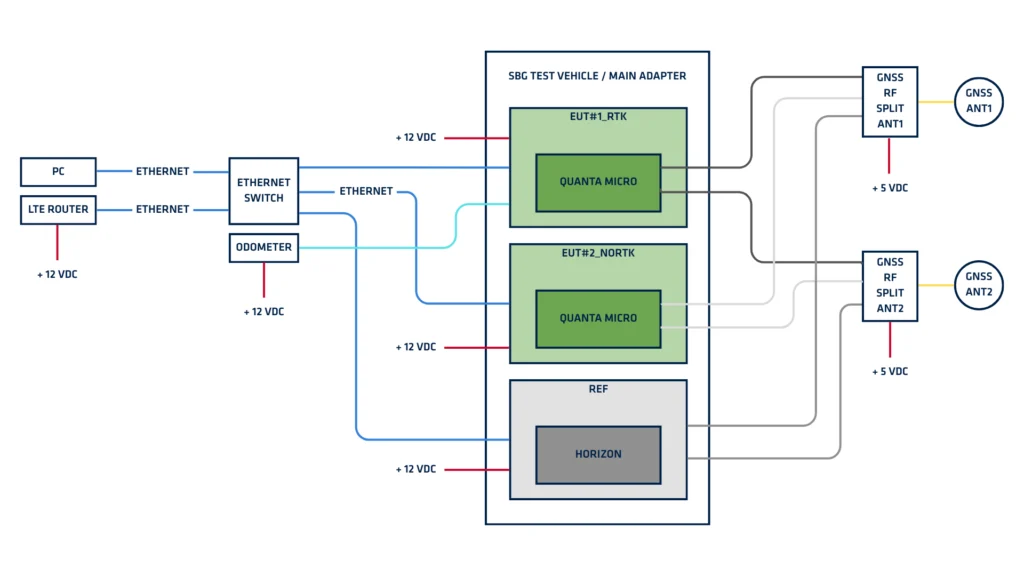
Configuration de l'EUT
L'équipement testé (Equipment Under Test, EUT) a été configuré comme suit pour les mesures en temps réel :
- EUT1 : GNSS avec les 4 constellations, RTK et assistance odométrique.
- EUT2 : GNSS avec les 4 constellations, sans RTK, sans assistance odométrique.
Résultats des tests automobiles
Les tests automobiles comprennent une phase de préchauffage, et toutes les statistiques ont été calculées avec son inclusion intentionnelle.
Ce choix a dans la plupart des cas un impact négatif sur la plupart des chiffres, en particulier pour les erreurs de cap qui diminuent très rapidement dans les 5 à 10 premières minutes de la mission et où les valeurs élevées ont un impact significatif sur l'écart type et le RMS.
De plus, nous avons calculé les statistiques double antenne sans RTK, RTK et PPK, qui représentent le mieux les profils automobiles, en incluant intentionnellement les trois parties de la mission : environnements GNSS ouverts, moyens et difficiles. Ce choix a également un impact négatif sur la plupart des chiffres.
Ces deux choix font apparaître les valeurs comme pessimistes. Cependant, ils démontrent que la Quanta Micro est toujours utilisable avec des performances particulièrement bonnes dès la phase d'alignement (même si aucun préchauffage n'est possible) et prouvent la robustesse des algorithmes de la Quanta Micro qui sont capables de presque atteindre les spécifications de performance du produit, même dans un environnement de test beaucoup plus difficile que celui spécifié.
Scénarios en temps réel
Ces INS sont capables de fonctionner en temps réel, fournissant une solution de navigation à haute fréquence et à faible latence avec ou sans corrections RTK. Les tableaux et figures ci-dessous fournissent des résultats détaillés en temps réel pour les deux EUT dans les conditions suivantes.
- profil de mouvement automobile
- assistance odométrique pour EUT #1 (RTK), aucune assistance odométrique pour EUT #2 (pas de RTK)
- avec entrée de cap GNSS double antenne
| EUT#1 (RTK + odo) | EUT#2 (sans RTK, sans odo) | |||
|---|---|---|---|---|
| Erreur | 68% | 95% | 68% | 95% |
| Position 2D | 0.021m | 0.246m | 1.155m | 2.734m |
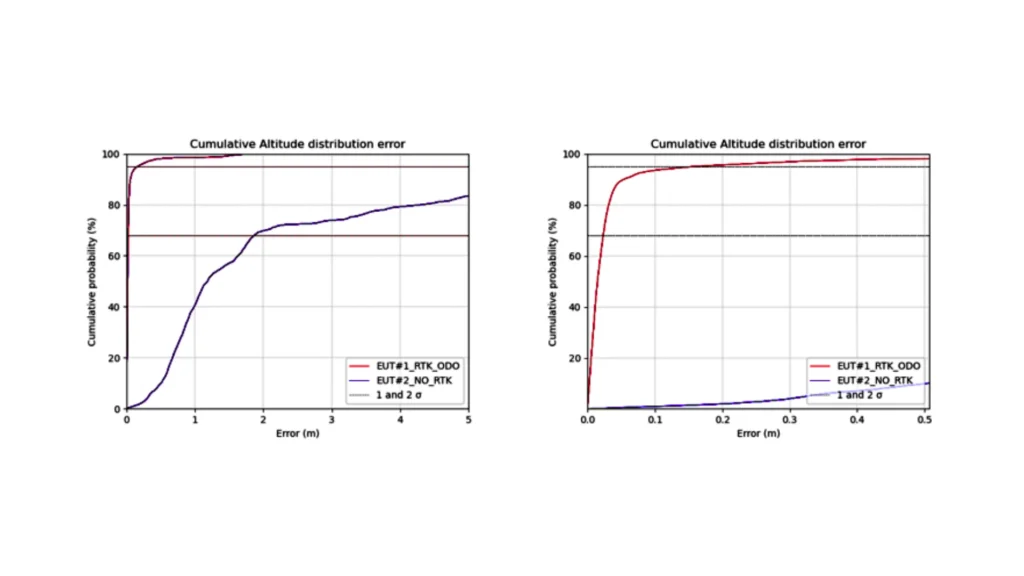
| Position verticale | 0.023m | 0.157m | 1.865m | 7.329m |
| Roulis / Tangage | 0.011° | 0.026° | 0.015° | 0.035° |
| Lacet | 0.060° | 0.140° | 0.078° | 0.190° |
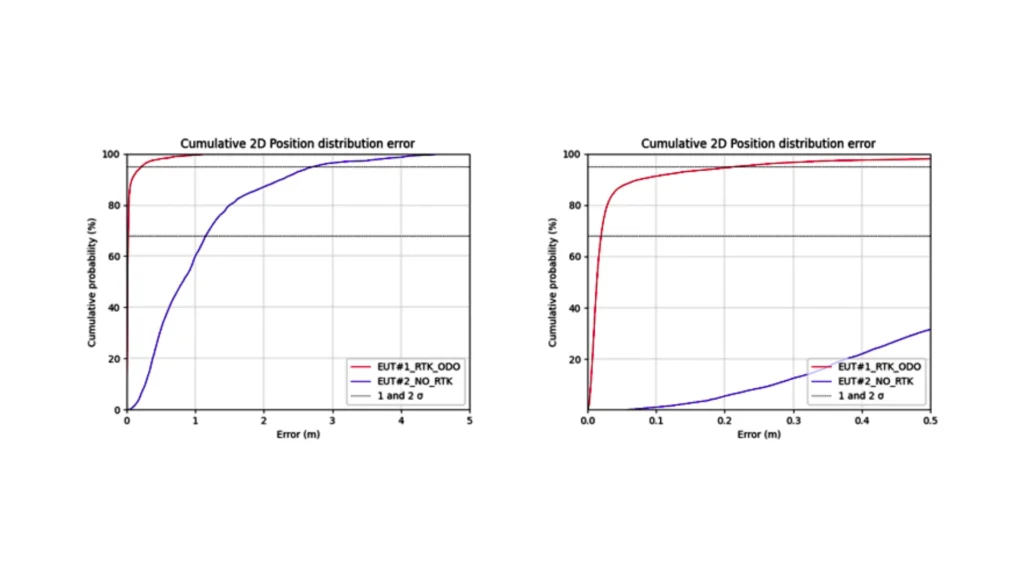
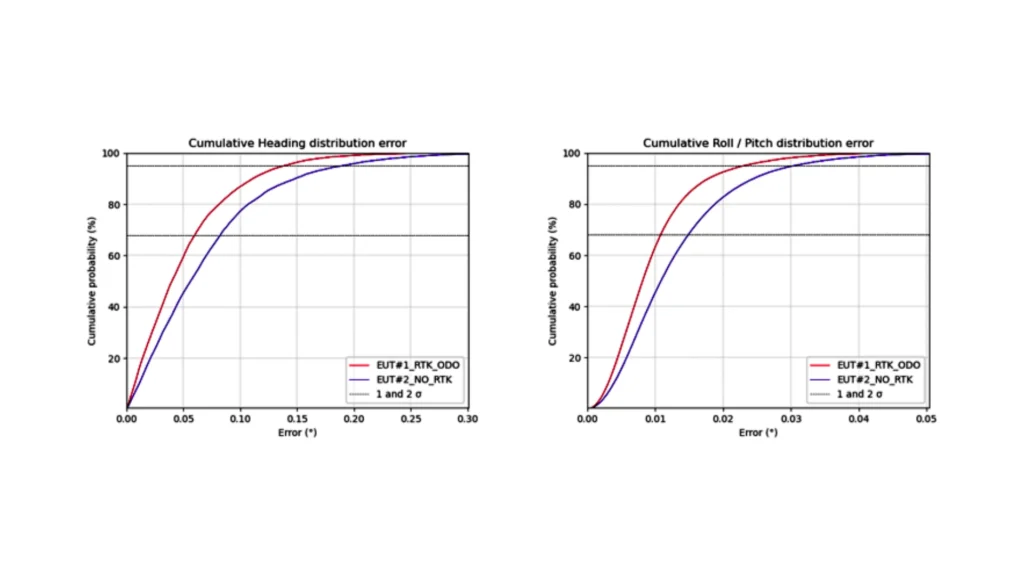
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Scénarios post-traités
Ces scénarios évaluent les performances ultimes du produit réalisables avec le logiciel de post-traitement Qinertia en mode de calcul TC fusionné (avant + arrière) et comparent l'influence du profil de mouvement. Les résultats, affichés pour un seul EUT (EUT #2), étaient presque identiques pour les deux unités.
| Profil TC automobile (double antenne + odomètre) | Profil TC avion (antenne unique | |||
|---|---|---|---|---|
| Erreur | 68% | 95% | 68% | 95% |
| Position 2D | 0.014m | 0.093m | 0.014m | 0.100m |
| Position verticale | 0.008m | 0.032m | 0.008m | 0.034m |
| Roulis / Tangage | 0.011° | 0.032° | 0.011° | 0.032° |
| Lacet | 0.051° | 0.211° | 0.041° | 0.208° |
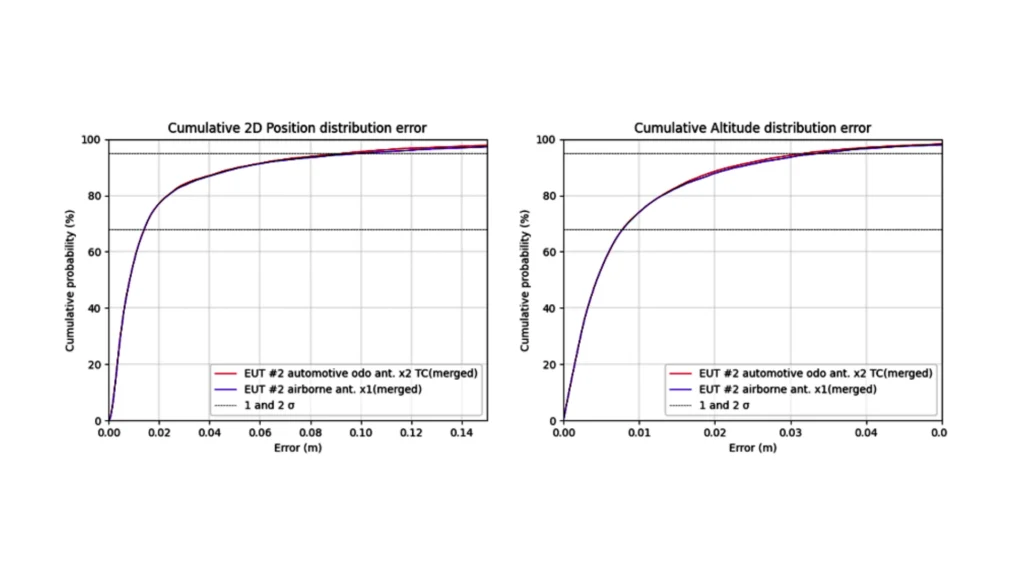
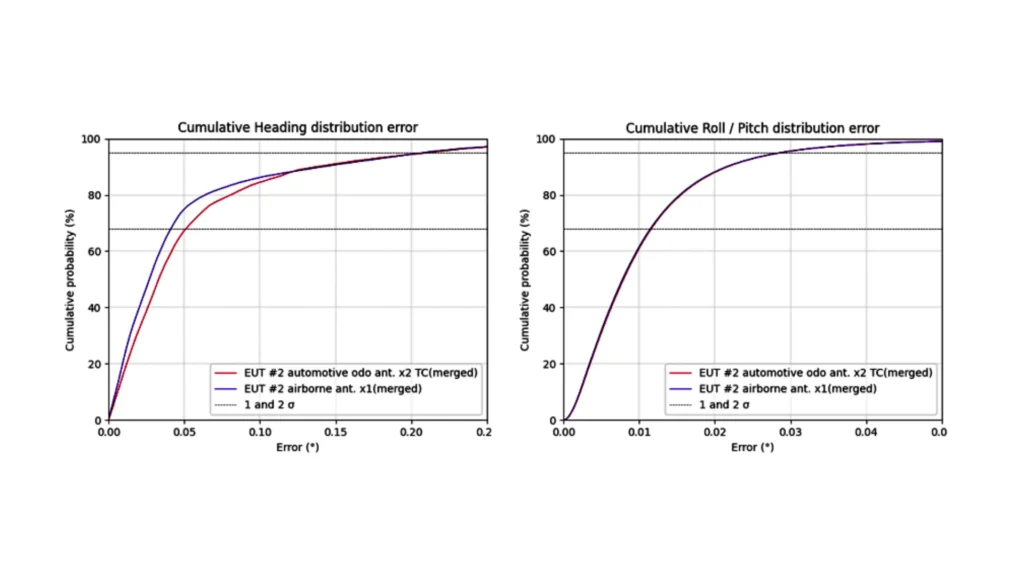
Le tableau et les graphiques précédents montrent que le profil de mouvement a une influence marginale sur les performances de post-traitement.
Même si l'environnement GNSS était très difficile, le produit se comporte très bien et produit des résultats très précis. Quant au temps réel, la restriction de la mission à un environnement urbain ouvert et moyen conduit à des résultats meilleurs que les spécifications du produit.
Conclusion
Les essais et l'analyse des données subséquente des Ekinox Micro et Quanta Micro mettent en évidence leurs solides capacités, leur fiabilité et leur précision. Ces systèmes offrent des performances exceptionnelles en modes antenne simple et double (récepteurs GNSS RTK), même dans des environnements difficiles.
Les Ekinox Micro et Quanta Micro sont d'excellents choix pour les applications en temps réel qui exigent un positionnement et une détermination d'attitude stables et précis. Ils fonctionnent efficacement même dans des environnements urbains exigeants, démontrant ainsi leur robustesse.
De plus, dans les scénarios où la performance en temps réel n'est pas cruciale (tels que le relevé LiDAR et la photogrammétrie), le logiciel Qinertia de SBG Systems offre un post-traitement exceptionnel, portant les performances à une précision centimétrique même dans des environnements GNSS difficiles. Cela fait de la combinaison de l'INS et de Qinertia le choix parfait pour le géoréférencement direct et les techniques SLAM.
Cette étude valide de manière concluante que les Quanta Micro et Ekinox Micro conviennent à diverses applications, y compris celles soumises à des contraintes strictes de taille, de poids et de performance.
- La Quanta Micro, conçue comme une solution OEM, s'intègre parfaitement dans les applications de levés par drone et de navigation volumétrique.
- Avec sa conception conviviale et sa robustesse (qualifiée selon les normes MIL-STD-461 et MIL-STD-1275), l'Ekinox Micro convient aux applications de levés légers, mais elle est à son meilleur dans les applications de navigation où la robustesse est essentielle.
Pour les tâches de levés qui exigent des paramètres SWaP-C plus flexibles et une plus grande précision dans un large éventail de conditions, SBG Systems propose les produits Quanta Plus, Quanta Extra, Ekinox, Apogee et Navsight. Ces alternatives, également entièrement compatibles avec les capacités de post-traitement de Qinertia, offrent des niveaux de performance accrus et constituent d'excellentes options pour les applications qui nécessitent des performances optimales.
Télécharger le rapport PDF