Ekinox Micro e Quanta Micro estão na vanguarda da navegação urbana, e os submetemos a testes automotivos.
São dois Sistemas de Navegação Inercial, combinando IMU tática baseada em MEMS e receptores RTK GNSS completos para fornecer desempenho incomparável em um formato incrivelmente compacto.
Especialmente projetados para aplicações com restrições SWaP rigorosas, como veículos terrestres/aéreos/marítimos não tripulados, mapeamento interno e até mesmo levantamento aéreo com UAVs.
Este artigo abrangente de avaliação de desempenho é baseado em um teste exaustivo executado em julho de 2022 para validar os recursos do Quanta Micro em antecipação à sua introdução comercial. Através deste relatório, o desempenho dinâmico dos sistemas é demonstrado.
Os sensores foram amplamente testados em vários ambientes GNSS, incluindo céu aberto, áreas urbanas médias e canyons urbanos. Os resultados mostraram consistentemente uma qualidade de dados excepcional. Tanto o Quanta Micro quanto o Ekinox Micro excederam o desempenho especificado, mesmo em cenários desafiadores.
Embora as especificações sejam geralmente baseadas no cenário padrão da indústria, como condições normais de terreno após uma fase de aquecimento, o teste incluiu condições urbanas difíceis sem uma fase de aquecimento.
Notavelmente, o Ekinox Micro e o Quanta Micro se destacaram neste teste, demonstrando um desempenho excelente em todas as condições.
Pré-requisito
A leitura destes relatórios de teste requer algum nível de conhecimento sobre navegação inercial e conceitos de pós-processamento. Nossa base de conhecimento o ajudará a iniciar sua jornada no maravilhoso mundo da navegação inercial.
Acrônimos
- CORS: Estações de Referência de Operação Contínua
- DUT: Dispositivo em teste
- EUT: Equipamento em teste
- FOG: Giroscópio de Fibra Óptica
- GNSS: Sistemas Globais de Navegação por Satélite (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (agência geográfica oficial francesa)
- IMU: Unidade de Medição Inercial
- INS: Sistema de Navegação Inercial
- LiDAR: Light Detection And Ranging
- MEMS: Sistema Micro Eletromecânico
- Mesclado: Pós-processamento Forward + Backward usando Qinertia
- PPK: Cinemática Pós-Processada
- RGP: Réseau GNSS Permanent (rede CORS nacional francesa)
- RMS: Root Mean Square (Raiz Quadrada Média)
- RTK: Cinemática em Tempo Real
- DP: Desvio padrão
- SWaP-C: Tamanho, Peso e Potência – Custo
- TC: Acoplamento Estreito (Tight Coupling)
- VANT: Veículo Aéreo Não Tripulado
Objetivos e especificações da missão de teste
Planejamento e execução da missão
O teste foi realizado a bordo do veículo de teste da SBG Systems em 7 de julho de 2022. Foi um percurso de 115 minutos, em condições climáticas claras, nas proximidades das instalações da SBG System, incluindo:
- 45 minutos de operações contínuas em condições de céu aberto.
- 35 minutos de operações contínuas em ambiente urbano semi-denso.
- 35 minutos de operações contínuas em ambiente urbano hostil, incluindo túneis.

Considerando a complexidade do ambiente, não foi dada atenção especial ao planejamento da missão para selecionar um horário favorável do dia em relação à visibilidade dos satélites.
Objetivos da missão
Esta missão foi especificamente projetada para demonstrar como o Quanta Micro e o Ekinox Micro INS se comportam em um cenário do mundo real. Isso nos permitiu validar se o INS atende (e excede) suas especificações, mas também demonstrar seu excelente desempenho, mesmo nas condições GNSS mais difíceis.
Durante a missão, coletamos dados medindo o desempenho em tempo real do Quanta Micro; em seguida, realizamos o pós-processamento dos mesmos conjuntos de dados (PPK).
Isso nos permite fornecer uma visão completa do desempenho do Quanta Micro INS em um ambiente automotivo; e, em menor grau, outras aplicações (que são objeto de relatórios de teste específicos).
A vantagem de usar perfis de movimento otimizados é demonstrada comparando o processamento em perfis de movimento automotivo e de avião.
Configuração de testes automotivos
Equipamento Sob Teste
| Nome | Descrição | Revisão HW | Número de Série | Versão do Firmware |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Avaliado por procuração | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Para todos os testes, os parâmetros de instalação (desalinhamentos, braço de alavanca, etc.) eram conhecidos a priori, seja a partir de desenhos CAD ou de calibrações anteriores.
Tenha em mente que, embora ambas as EUT sejam a Quanta Micro, o conteúdo deste relatório de teste é totalmente aplicável à Ekinox Micro: é uma versão robusta da Quanta Micro e se comporta exatamente da mesma maneira. Uma série de comparações internas meticulosas confirmaram esta afirmação.
Trajetória de referência
A fonte de referência usada para avaliar os erros de desempenho é uma trajetória acoplada de forma precisa processada por Qinertia com dados provenientes da IMU Horizon da SBG Systems (desempenho máximo baseado em FOG), Navsight-S e odômetro Pegasem instalados a bordo do veículo juntamente com o EUT. A versão do Qinertia usada para pós-processamento foi a 3.2.881-stable.
| Nome | Descrição | Precisão da posição | Precisão da Atitude | Precisão do rumo |
|---|---|---|---|---|
| Navsight Horizon | INS baseado em FOG | 0,01m (0,01m @ 10s) (0,05m @ 60s) | 0,004° (0,004° @ 10s) (0,005° @ 60s) | 0,008° (0,008° @ 10s) (0,010° @ 60s) |
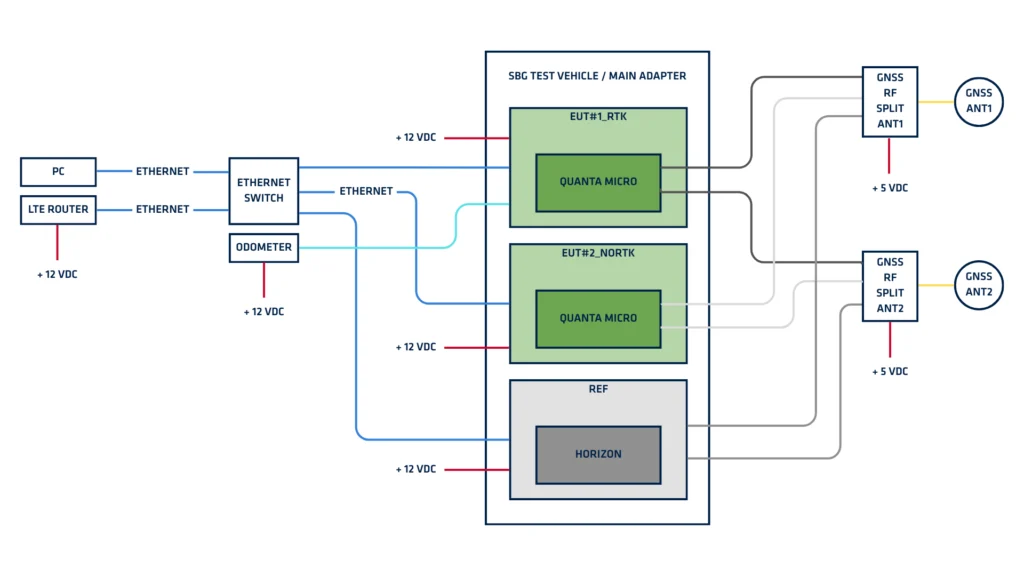
As duas antenas GNSS VSP6037L que alimentam o Navsight-S são compartilhadas com o EUT (ver diagrama de configuração de teste).
A partir da análise de dados a posteriori, os indicadores de qualidade (estimadores de desvio padrão de posição e atitude) da trajetória Horizon pós-processada permitem que esta seja utilizada como referência em relação ao EUT.
Cada uma das três posições do INS instaladas a bordo foi transferida para um ponto comum para permitir comparações diretas.
Estação base
Todas as operações PPK e RTK foram realizadas usando uma única base, a estação SBG, que está instalada no telhado das instalações da SBG Systems e incluída no IGN RGP, a rede CORS francesa.
A SBGS fornece rastreamento completo de constelações GNSS (GPS + GLONASS + GALILEO + BEIDOU). Todas as quatro constelações foram usadas para operações RTK em tempo real.
Veículo de teste
O veículo de teste era uma van dedicada da SBG Systems, equipada com nosso equipamento padrão, conforme apresentado no diagrama de configuração a seguir.

A linha de base entre ambas as antenas GNSS é de cerca de 2 m e a maioria dos parâmetros de instalação são conhecidos com uma precisão particularmente boa.
Configuração do EUT
O equipamento em teste (EUT) foi configurado da seguinte forma para medições em tempo real:
- EUT1: GNSS com as 4 constelações, RTK e auxílio do odômetro.
- EUT2: GNSS com as 4 constelações, sem RTK, sem auxílio do odômetro.
Resultados de testes automotivos
Os testes automotivos incluem uma fase de aquecimento, e todas as estatísticas foram computadas com a sua inclusão proposital.
Essa escolha tem, na maioria dos casos, um impacto negativo na maioria dos números, especialmente para os erros de heading, que diminuem muito rapidamente nos primeiros 5 a 10 minutos da missão e onde valores altos têm um impacto significativo no desvio padrão e no RMS.
Além disso, computamos as estatísticas de antena dupla sem RTK, RTK e PPK, que melhor representam os perfis automotivos, incluindo intencionalmente todas as três partes da missão: ambientes GNSS de céu aberto, médio e severo. Essa escolha também tem um impacto negativo na maioria dos números.
Essas duas escolhas fazem com que os valores pareçam pessimistas. No entanto, eles demonstram que o Quanta Micro ainda é utilizável com um desempenho particularmente bom logo após a fase de alinhamento (mesmo que não seja possível o aquecimento) e comprovam a robustez dos algoritmos do Quanta Micro, que são capazes de quase atender às especificações de desempenho do produto, mesmo em um ambiente de teste muito mais difícil do que o especificado.
Cenários em tempo real
Esses INS são capazes de funcionar em tempo real, fornecendo uma solução de navegação de alta frequência e baixa latência com ou sem correções RTK. As tabelas e figuras abaixo fornecem resultados detalhados em tempo real para ambos os EUTs nas seguintes condições.
- Perfil de movimento automotivo
- Odométrico auxiliando para EUT #1 (RTK), sem odométrico auxiliando para EUT #2 (Sem RTK)
- com entrada de heading GNSS de antena dupla
| EUT#1 (RTK + odômetro) | EUT#2 (sem RTK, sem odômetro) | |||
|---|---|---|---|---|
| Erro | 68% | 95% | 68% | 95% |
| Posição 2D | 0.021m | 0.246m | 1.155m | 2.734m |
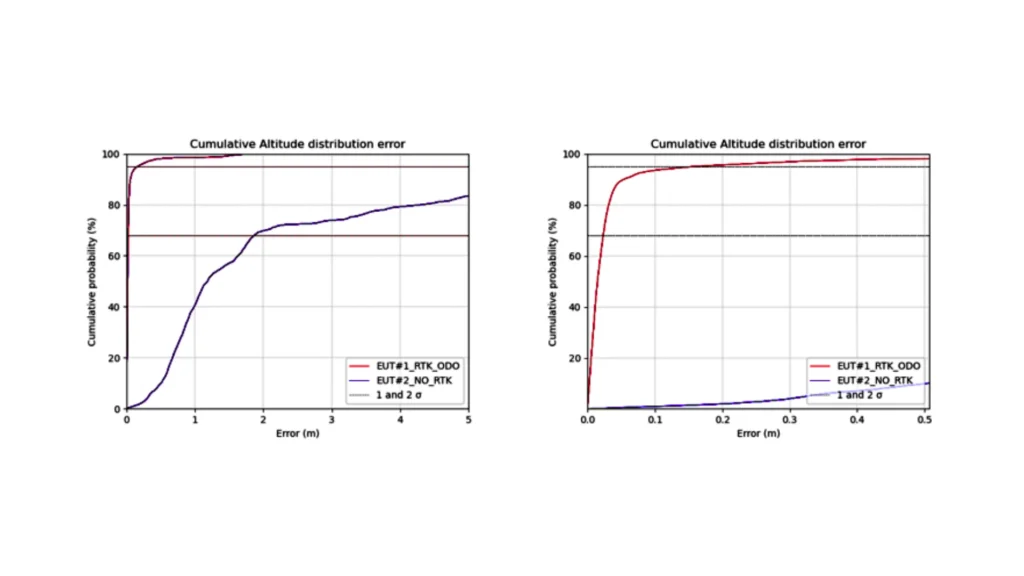
| Posição vertical | 0.023m | 0.157m | 1.865m | 7.329m |
| Rolagem / Inclinação | 0.011° | 0.026° | 0.015° | 0.035° |
| Yaw | 0.060° | 0.140° | 0.078° | 0.190° |
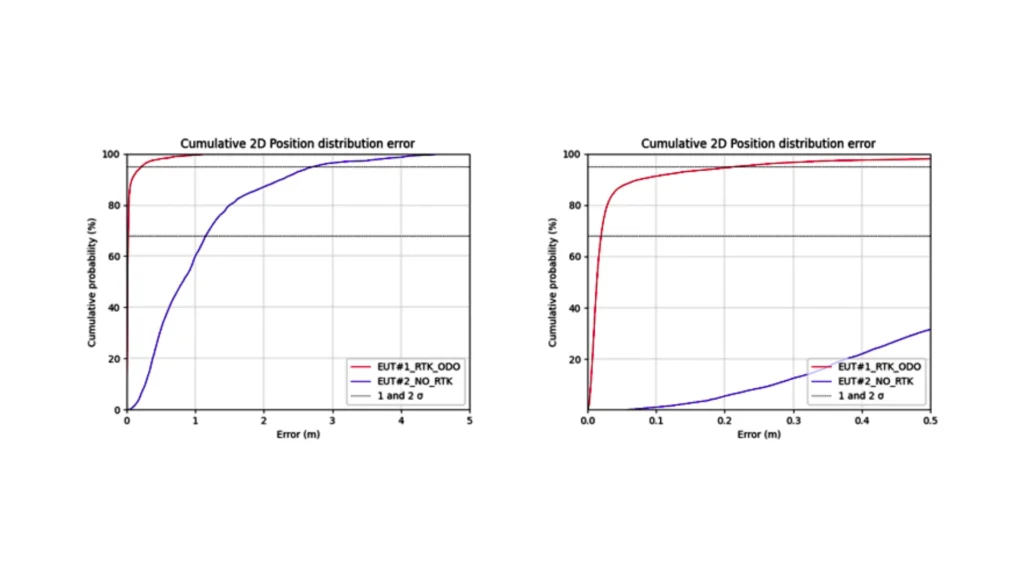
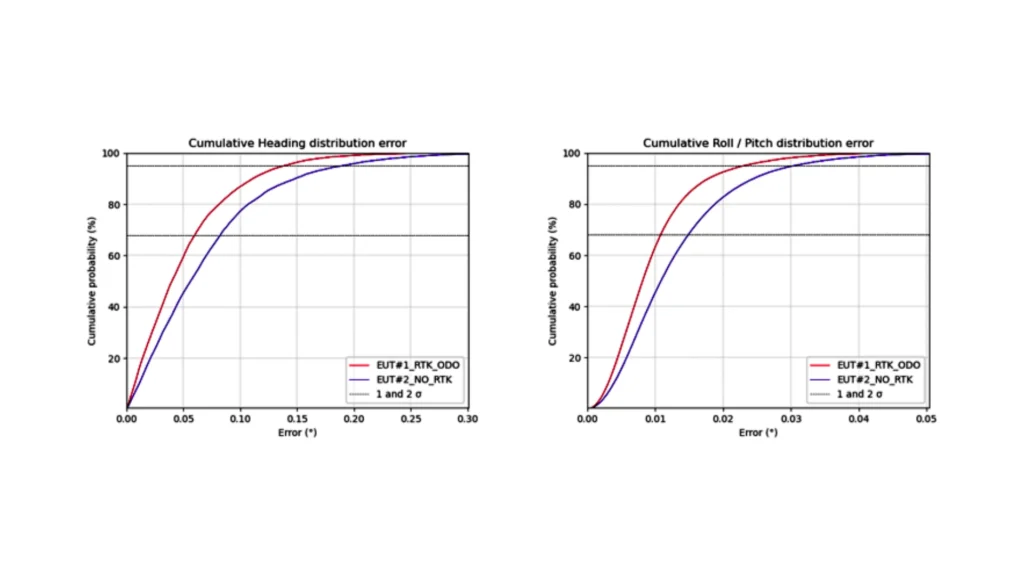
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Cenários pós-processados
Esses cenários avaliam o desempenho máximo do produto alcançável com o software de pós-processamento Qinertia no modo de computação TC merged (forward + backward) e comparam a influência do perfil de movimento. Os resultados, exibidos para um único EUT (EUT #2), foram quase idênticos para ambas as unidades.
| Perfil automotivo TC (antena dupla + odômetro) | Perfil de aeronave TC (antena única) | |||
|---|---|---|---|---|
| Erro | 68% | 95% | 68% | 95% |
| Posição 2D | 0.014m | 0.093m | 0.014m | 0.100m |
| Posição vertical | 0.008m | 0.032m | 0.008m | 0.034m |
| Rolagem / Inclinação | 0.011° | 0.032° | 0.011° | 0.032° |
| Yaw | 0.051° | 0.211° | 0.041° | 0.208° |
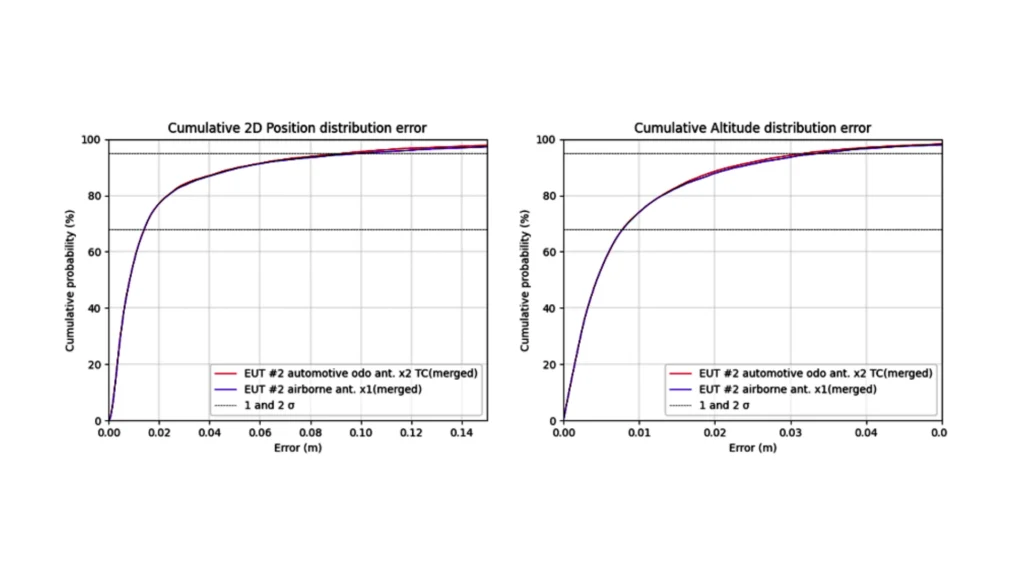
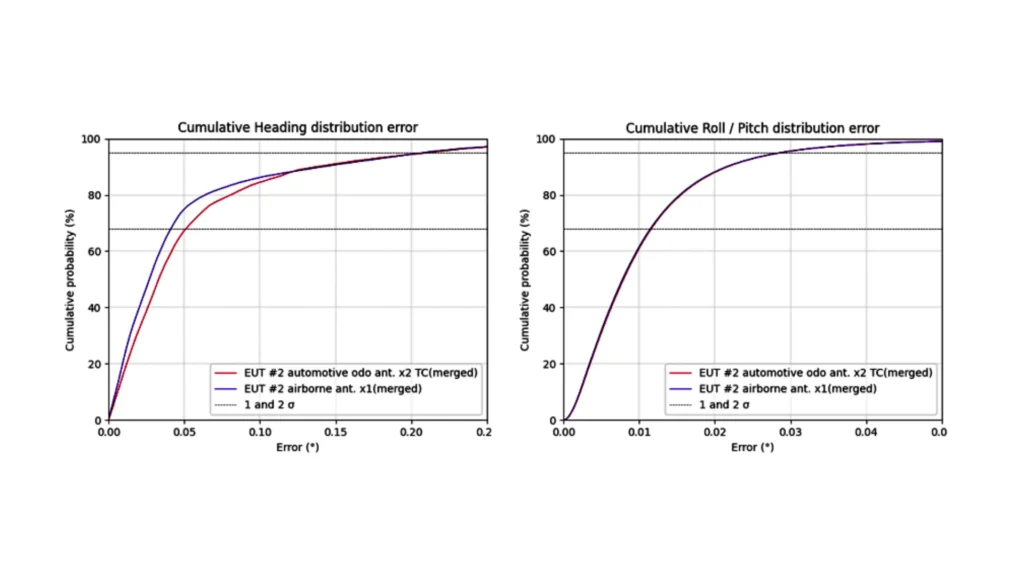
A tabela e os gráficos anteriores mostram que o perfil de movimento tem uma influência marginal no desempenho do pós-processamento.
Mesmo que o ambiente GNSS fosse muito difícil, o produto se comporta muito bem e produz resultados muito precisos. Quanto ao tempo real, restringir a missão a céu aberto e ambiente urbano médio leva a resultados melhores do que as especificações do produto.
Conclusão
Os testes e a análise de dados subsequente do Ekinox Micro e do Quanta Micro destacam suas fortes capacidades, confiabilidade e precisão. Esses sistemas apresentam um desempenho excepcional tanto em modos de antena única quanto dupla (receptores GNSS RTK), mesmo em ambientes desafiadores.
O Ekinox Micro e o Quanta Micro são excelentes escolhas para aplicações em tempo real que exigem posicionamento e determinação de atitude estáveis e precisos. Eles funcionam eficazmente mesmo em ambientes urbanos exigentes, demonstrando sua robustez.
Além disso, em cenários onde o desempenho em tempo real não é crucial (como levantamento LiDAR e fotogrametria), o software Qinertia da SBG Systems oferece um pós-processamento excepcional, elevando o desempenho a uma precisão de nível centimétrico mesmo em ambientes GNSS desafiadores. Isso torna a combinação do INS e do Qinertia a escolha perfeita para georreferenciamento direto e técnicas SLAM.
Este estudo valida conclusivamente que o Quanta Micro e o Ekinox Micro são adequados para diversas aplicações, incluindo aquelas com rigorosas considerações de tamanho, peso e desempenho.
- Quanta Micro, projetado como uma solução OEM, integra-se perfeitamente em aplicações de levantamento com UAV e navegação volumétrica.
- Com seu design amigável e robustez (qualificado sob MIL-STD-461 e MIL-STD-1275), o Ekinox Micro é adequado para aplicações de levantamento leve, mas está no seu melhor em aplicações de navegação onde a robustez é fundamental.
Para tarefas de levantamento que exigem parâmetros de SWaP-C mais flexíveis e maior precisão em um amplo espectro de condições, a SBG Systems oferece os produtos Quanta Plus, Quanta Extra, Ekinox, Apogee e Navsight. Essas alternativas, também totalmente compatíveis com os recursos de pós-processamento do Qinertia, fornecem níveis de desempenho aprimorados e servem como excelentes opções para aplicações que exigem o máximo de desempenho.
Download do relatório em PDF