Ekinox Micro y Quanta Micro están a la vanguardia de la navegación urbana, y los hemos sometido a pruebas de automoción.
Son dos sistemas de navegación inercial que combinan IMU táctica basada en MEMS y receptores GNSS RTK con todas las funciones para ofrecer un rendimiento sin precedentes en un formato sorprendentemente compacto.
Especialmente diseñados para aplicaciones con estrictas limitaciones de SWaP, como vehículos terrestres/aéreos/marinos no tripulados, cartografía en interiores e incluso topografía con UAV.
Este exhaustivo artículo de evaluación del rendimiento se basa en una prueba exhaustiva realizada en julio de 2022 para validar las capacidades de Quanta Micro antes de su introducción comercial. A través de este informe, se demuestra el rendimiento dinámico de los sistemas.
Los sensores se probaron exhaustivamente en diversos entornos GNSS, incluidos cielos abiertos, zonas urbanas medias y cañones urbanos. Los resultados mostraron sistemáticamente una calidad de datos excepcional. Tanto Quanta Micro como Ekinox Micro superaron el rendimiento especificado, incluso en escenarios difíciles.
Aunque las especificaciones suelen basarse en el escenario estándar del sector, como condiciones terrestres normales tras una fase de calentamiento, la prueba incluyó condiciones urbanas difíciles sin fase de calentamiento.
Sorprendentemente, Ekinox Micro y Quanta Micro han destacado en esta prueba, demostrando un rendimiento sobresaliente en todas las condiciones.
Requisito previo
La lectura de estos informes de prueba requiere cierto nivel de conocimiento de los conceptos de navegación inercial y post-procesamiento. Nuestra base de conocimientos le ayudará a iniciar su viaje por el maravilloso mundo de la navegación inercial.
Acrónimos
- CORS: Estaciones de Referencia de Funcionamiento Continuo
- DUT: Dispositivo bajo prueba
- EUT: Equipo bajo prueba
- FOG: Giroscopio de fibra óptica
- GNSS: Sistemas Mundiales de Navegación por Satélite (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Instituto Geográfico Nacional (agencia geográfica oficial francesa)
- IMU: Unidad de medición inercial
- INS: Sistema de navegación inercial
- LiDAR: Light Detection And Ranging (detección y medición de distancias por luz)
- MEMS: Sistema microelectromecánico
- Fusionado: Postprocesado hacia delante + hacia atrás con Qinertia
- PPK: Cinemática postprocesada
- RGP: Réseau GNSS Permanent (red nacional francesa de CORS)
- RMS: Media cuadrática
- RTK: Cinemática en tiempo real
- Std: Desviación estándar
- SWaP-C: Tamaño, Peso y Potencia - Coste
- TC: Acoplamiento estrecho
- UAV: Vehículo aéreo no tripulado
Objetivos y especificaciones de la misión de prueba
Planificación y ejecución de misiones
La prueba se realizó a bordo del vehículo de pruebas de SBG Systems el 7 de julio de 2022. Fue un trayecto de 115 minutos de duración, en condiciones meteorológicas despejadas, en las inmediaciones de las instalaciones de SBG System, entre ellas:
- 45 minutos de operaciones contiguas en condiciones de cielo abierto.
- 35 minutos de operaciones contiguas en un entorno urbano semidenso.
- 35 minutos de operaciones contiguas en entornos urbanos difíciles, incluidos túneles.

Teniendo en cuenta la complejidad del entorno, no se ha prestado especial atención a la planificación de la misión para seleccionar una hora del día favorable con respecto a la visibilidad de los satélites.
Objetivos de la misión
Esta misión se diseñó específicamente para demostrar cómo se comportan los INS Quanta Micro y Ekinox Micro en un escenario real. Esto nos permitió validar que los INS cumplen (y superan) sus especificaciones, pero también demostrar su extraordinario rendimiento incluso en las condiciones GNSS más difíciles.
Durante la misión recogimos datos que medían el rendimiento en tiempo real del Quanta Micro Micro; después realizamos el postprocesado de los mismos conjuntos de datos (PPK).
Esto nos permite ofrecer una visión completa del rendimiento del (INS) Quanta Micro en un entorno de automoción; y en menor medida en otras aplicaciones (que son objeto de informes de pruebas específicos).
La ventaja de utilizar perfiles de movimiento optimizados se demuestra comparando el procesamiento en perfiles de movimiento de automoción y de avión.
Configuración de pruebas de automoción
Equipos en prueba
| Nombre | Descripción | Revisión HW | Número de serie | Versión del firmware |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Evaluado por poderes | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Para todas las pruebas, los parámetros de instalación (desalineaciones, brazo de palanca, etc.) se conocían a priori a partir de planos CAD o de calibraciones anteriores.
Tenga en cuenta que aunque ambos EUT son el Quanta Micro, el contenido de este informe de prueba es totalmente aplicable al Ekinox Micro: es una versión robusta del Quanta Micro y se comporta exactamente de la misma manera. Una serie de meticulosas comparaciones internas han confirmado esta afirmación.
Trayectoria de referencia
La fuente de referencia utilizada para evaluar los errores de rendimiento es una trayectoria estrechamente acoplada procesada Qinertia con datos procedentes de la IMU Horizon SBG Systems (rendimiento final basado en FOG), Navsight y el odómetro Pegasem instalados a bordo del vehículo junto con el EUT. La versión de Qinertia utilizada para el post-procesado fue la 3.2.881-stable.
| Nombre | Descripción | Precisión de la posición | Precisión de la actitud | precisión de rumbo |
|---|---|---|---|---|
| Horizonte Navsight | INS basado en FOG | 0,01m (0,01m @ 10s) (0,05m @ 60s) | 0,004° (0,004° @ 10s) (0,005° @ 60s) | 0,008° (0,008° @ 10s) (0,010° @ 60s) |
Las dos antenas GNSS VSP6037L que alimentan el Navsight-S se comparten con el EUT (véase el diagrama de configuración de la prueba).
A partir del análisis de los datos a posteriori, los indicadores de calidad (estimadores de la desviación estándar de la posición y la actitud) de la trayectoria Horizon postprocesada permiten plenamente utilizar esta última como referencia con respecto a la EUT.
Cada una de las tres posiciones INS instaladas a bordo se ha transferido a un punto común para permitir comparaciones directas.
Estación base
Todas las operaciones PPK y RTK se realizaron utilizando una única base, la estación SBG'S instalada en el tejado de las instalaciones de SBG Systems e incluida en la RGP IGN, la red CORS francesa.
SBGS proporciona seguimiento de constelaciones GNSS completas (GPS + GLONASS + GALILEO + BEIDOU). Las cuatro constelaciones se utilizaron para operaciones RTK en tiempo real.
Vehículo de ensayo
El vehículo de pruebas era una furgoneta de SBG Systems, equipada de serie como se muestra en el siguiente diagrama.

La línea de base entre ambas antenas GNSS es de unos 2 m y la mayoría de los parámetros de instalación se conocen con especial precisión.
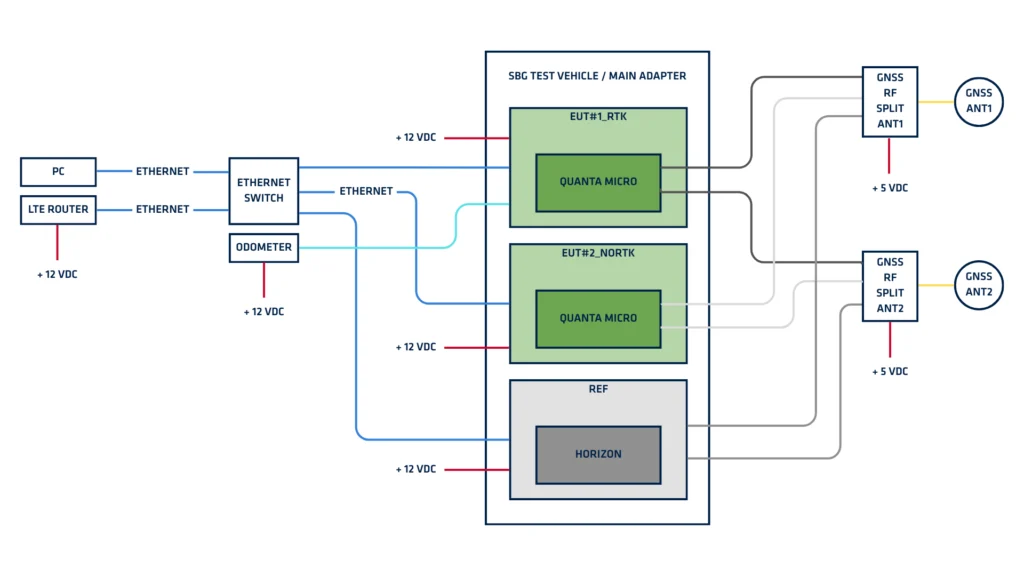
Configuración EUT
Los equipos bajo prueba (EUT) se configuraron de la siguiente manera para realizar mediciones en tiempo real:
- EUT1: GNSS con las 4 constelaciones, RTK y ayuda al odómetro.
- EUT2: GNSS con las 4 constelaciones, sin RTK, sin ayuda de odómetro.
Resultados de las pruebas de automoción
Las pruebas de automoción incluyen una fase de calentamiento, y todas las estadísticas se han calculado con su inclusión intencionada.
Esta elección tiene en la mayoría de los casos un impacto negativo en la mayoría de las cifras, especialmente para los errores de rumbo (heading), que disminuyen muy rápidamente en los primeros 5-10 minutos de la misión y donde los valores altos tienen un impacto significativo en std y RMS.
Además, calculamos las estadísticas sin RTK, RTK y PPK de antena dual, que representan mejor los perfiles de automoción, incluyendo intencionadamente las tres partes de la misión: entornos GNSS de cielo abierto, medio y duro. Esta elección también tiene un impacto negativo en la mayoría de las cifras.
Estas dos elecciones hacen que los valores parezcan pesimistas. Sin embargo, demuestran que Quanta Micro sigue siendo utilizable con un rendimiento especialmente bueno nada más salir de la fase de alineación (aunque no sea posible el calentamiento) y prueban la robustez de los algoritmos de Quanta Micro, que son capaces de cumplir prácticamente las especificaciones de rendimiento del producto incluso en un entorno de pruebas mucho más duro de lo especificado.
Escenarios en tiempo real
Estos INS son capaces de funcionar en tiempo real, proporcionando una solución de navegación de alta frecuencia y baja latencia con o sin correcciones RTK. Las tablas y figuras siguientes proporcionan resultados detallados en tiempo real para ambos EUT en las siguientes condiciones.
- perfil de movimiento del automóvil
- ayuda al odómetro para el EUT nº 1 (RTK), sin ayuda al odómetro para el EUT nº 2 (Sin RTK)
- con entrada de rumbo GNSS de doble antena
| EUT#1 (RTK + odo) | EUT#2 (sin RTK, sin odo) | |||
|---|---|---|---|---|
| Error | 68% | 95% | 68% | 95% |
| Posición 2D | 0.021m | 0.246m | 1.155m | 2.734m |
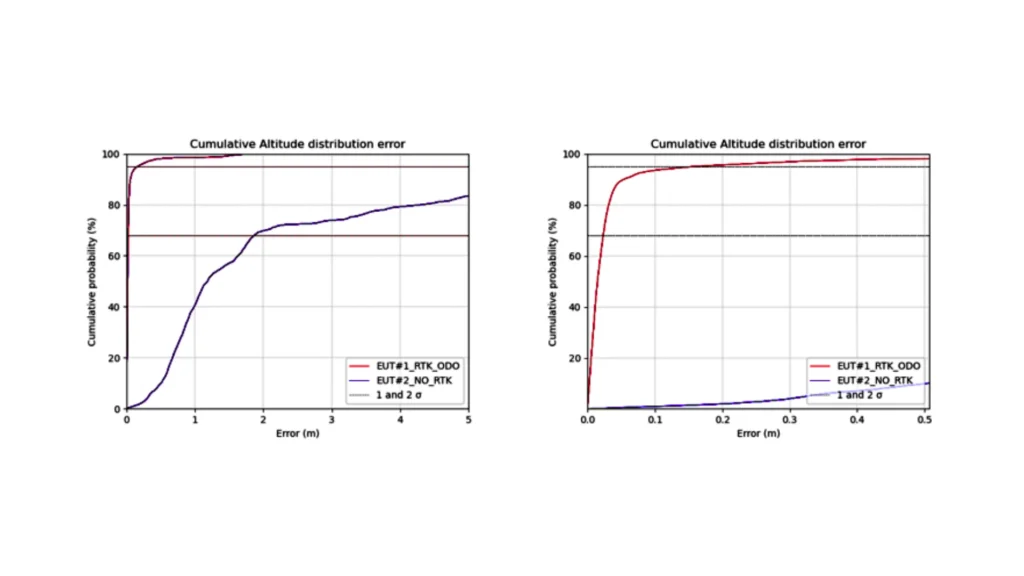
| Posición vertical | 0.023m | 0.157m | 1.865m | 7.329m |
| balanceo (roll) / cabeceo (pitch) | 0.011° | 0.026° | 0.015° | 0.035° |
| guiñada (raw) | 0.060° | 0.140° | 0.078° | 0.190° |
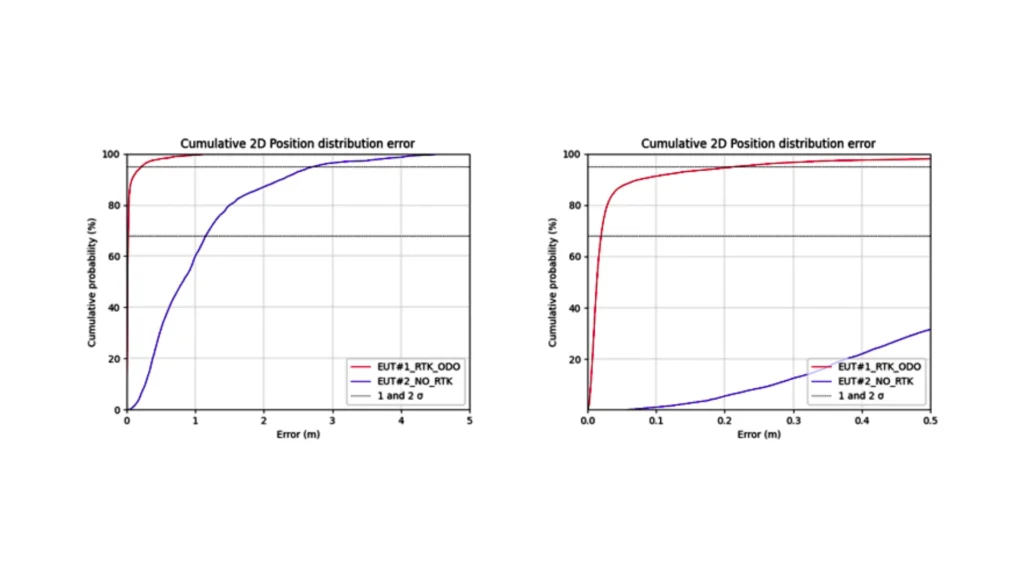
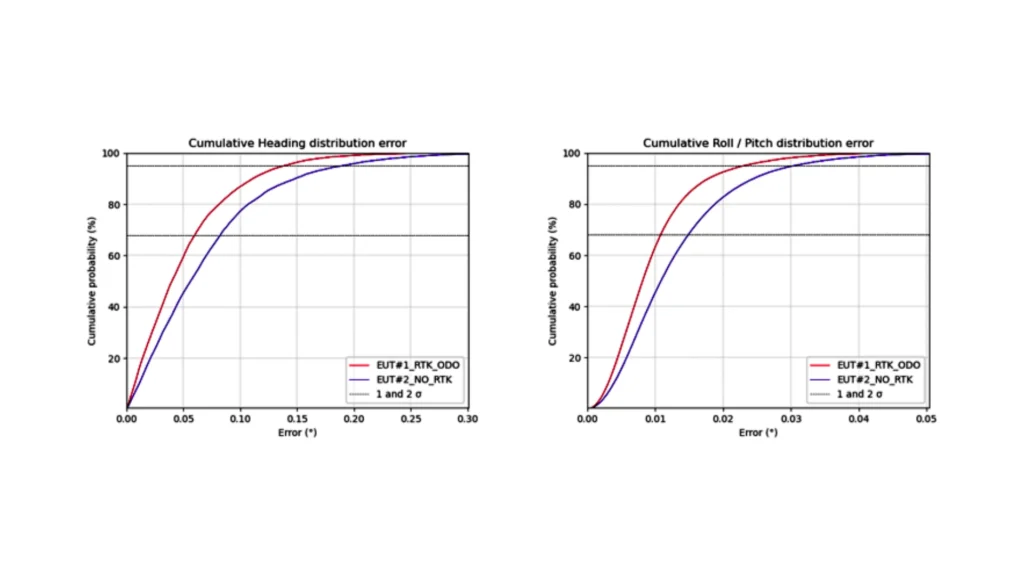
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Escenarios postprocesados
Estos escenarios evalúan el rendimiento final del producto alcanzable con el software de posprocesamiento Qinertia en el modo de cálculo combinado TC (hacia delante + hacia atrás) y comparan la influencia del perfil de movimiento. Los resultados, mostrados para un único EUT (EUT nº 2), fueron casi idénticos para ambas unidades.
| TC Automotive perfil (doble antena + odo) | TC Perfil de avión (antena única | |||
|---|---|---|---|---|
| Error | 68% | 95% | 68% | 95% |
| Posición 2D | 0.014m | 0.093m | 0.014m | 0.100m |
| Posición vertical | 0.008m | 0.032m | 0.008m | 0.034m |
| balanceo (roll) / cabeceo (pitch) | 0.011° | 0.032° | 0.011° | 0.032° |
| guiñada (raw) | 0.051° | 0.211° | 0.041° | 0.208° |
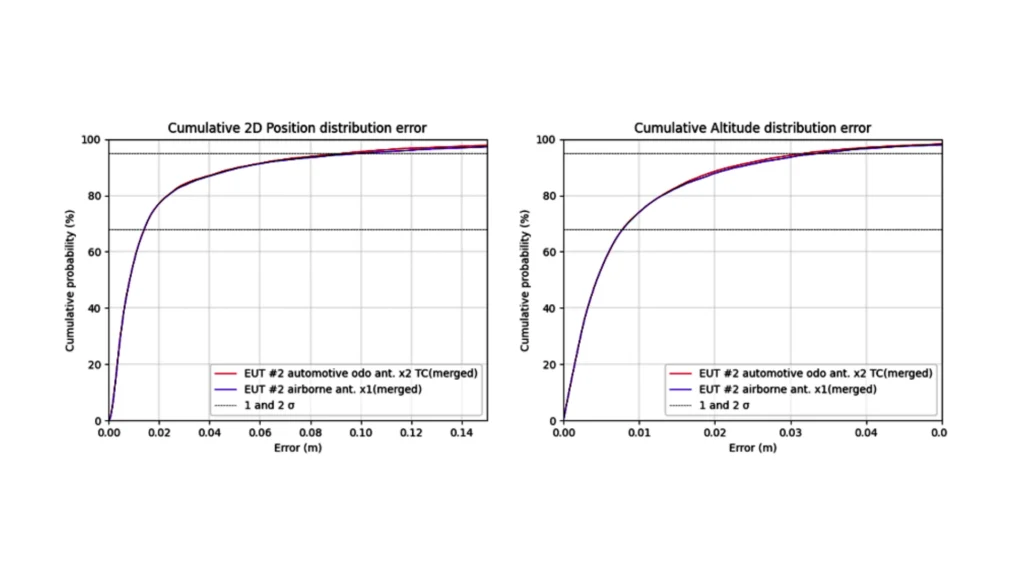
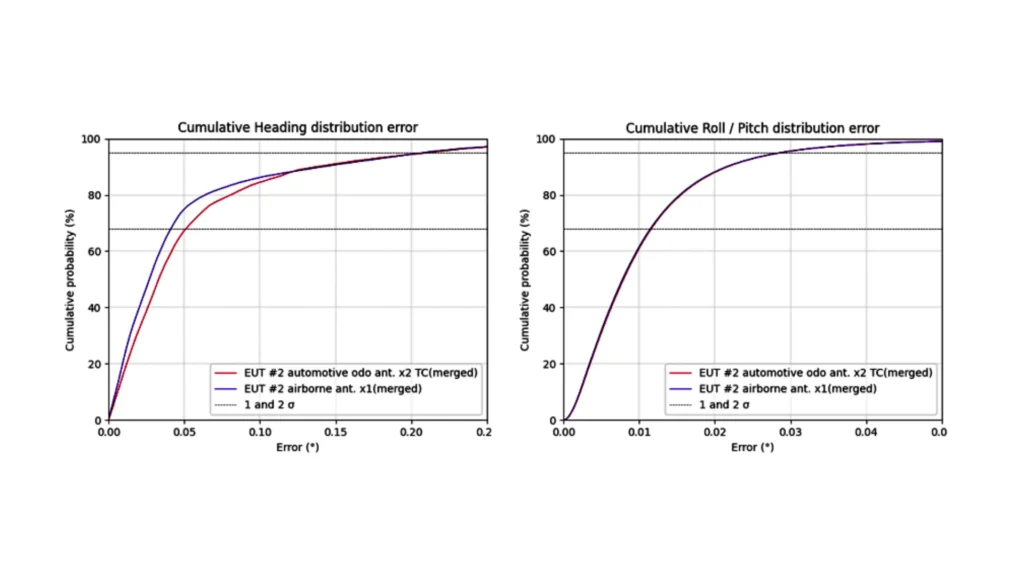
La tabla y los gráficos anteriores muestran que el perfil de movimiento tiene una influencia marginal en el rendimiento del posprocesado.
Aunque el entorno GNSS era muy difícil, el producto se comporta muy bien y produce resultados muy precisos. En cuanto al tiempo real, restringiendo la misión a cielo abierto y entorno urbano medio se obtienen resultados mejores que las especificaciones del producto.
Conclusión
La prueba y el posterior análisis de datos de Ekinox Micro y Quanta Micro ponen de relieve su gran capacidad, fiabilidad y precisión. Estos sistemas funcionan excepcionalmente bien tanto en modo de antena única como de antena doble (receptores GNSS RTK), incluso en entornos difíciles.
Ekinox Micro y Quanta Micro son excelentes opciones para aplicaciones en tiempo real que requieren un posicionamiento y una determinación de actitud constantes y precisos. Funcionan con eficacia incluso en entornos urbanos exigentes, lo que demuestra su robustez.
Además, en escenarios en los que el rendimiento en tiempo real no es crucial (como la topografía LiDAR y la fotogrametría), el software Qinertia de SBG Systems ofrece un posprocesamiento excepcional, que eleva el rendimiento a precisión centimétrica incluso en entornos GNSS difíciles. Esto convierte a la combinación de INS y Qinertia en la elección perfecta para técnicas de georreferenciación directa y SLAM.
Este estudio valida de forma concluyente que Quanta Micro y Ekinox Micro son adecuados para diversas aplicaciones, incluidas aquellas con estrictas consideraciones de tamaño, peso y rendimiento.
- Quanta Micro, diseñada como solución OEM, se integra perfectamente en aplicaciones de topografía y navegación volumétrica de UAV.
- Gracias a su diseño fácil de usar y a su robustez (cualificada según MIL-STD-461 y MIL-STD-1275), Ekinox Micro es idóneo para aplicaciones topográficas ligeras, pero también para aplicaciones de navegación en las que la robustez es fundamental.
Para tareas topográficas que exigen parámetros SWaP-C más flexibles y una mayor precisión en un amplio espectro de condiciones, SBG Systems ofrece los productos Quanta Plus, Quanta Extra, Ekinox, Apogee y Navsight. Estas alternativas, también totalmente compatibles con las capacidades de postprocesamiento de Qinertia, proporcionan niveles de rendimiento superiores y constituyen excelentes opciones para aplicaciones que requieren el máximo rendimiento.
Descargar el informe en PDF