uORocketry alcanza el Top 10 en la SA Cup con SBG INS/GNSS
El equipo de cohetes de la Universidad de Ottawa integra el sistema de navegación inercial Ellipse-N para la Spaceport America Cup.
“La unidad y la experiencia que proporcionó SBG Systems nos ayudaron a acercarnos a la consecución de un algoritmo de control optimizado para los aerofrenos.” | Equipo de cohetes de la Universidad de Ottawa

La Universidad de Ottawa participó en la Spaceport America Cup
La Spaceport America Cup es el concurso internacional interuniversitario de ingeniería de cohetes más grande del mundo, que combina conferencias académicas y competición.
Durante la edición de 2019, 1.500 estudiantes de más de 124 equipos lanzaron cohetes sólidos, líquidos e híbridos para alcanzar altitudes objetivo de 10.000 y 30.000 pies.

Para su segunda participación, uORocketry, el equipo de cohetes de la Universidad de Ottawa, procedió a otra iteración de su diseño anterior para mejorar las características clave.
Un cohete con un increíble sistema automatizado de frenado aerodinámico
El cohete de uORocketry, Jackalope, disfruta de una importante ventaja competitiva: su sistema automatizado de frenado aerodinámico, totalmente controlado por su ordenador de vuelo a bordo. Aumenta la resistencia y ralentiza el cohete a medida que se acerca a la altitud.
Uno de los principales objetivos del equipo este año era la mejora de la fiabilidad de su sistema de recuperación.
Para lograrlo, se basaron en su sistema de frenado aerodinámico mecánicamente robusto, así como en un método de control para accionarlo eficazmente.
El sistema de aviónica es responsable del control en tiempo real de los frenos aerodinámicos, la puesta en escena del sistema de recuperación y el envío de telemetría durante el vuelo para el registro y la recuperación de datos.
Mejora de la fiabilidad del sistema de recuperación gracias al Ellipse-N
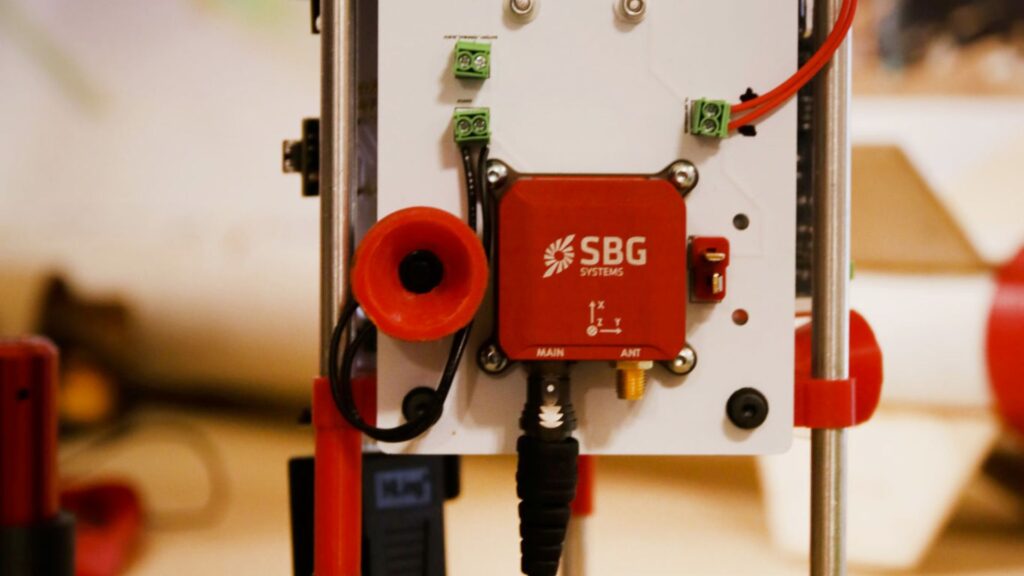
uORocketry integró el Sistema de Navegación Inercial Ellipse-N de SBG Systems en su solución de aviónica de 2019 para lograr un algoritmo de control optimizado para los aerofrenos.
El equipo integró esta solución de sensor INS GNSS en la placa de alimentación del hardware, utilizándola para estimaciones de estado con el fin de determinar el despliegue ideal de los aerofrenos.
Esquema de frenado aéreo que integra un INS
Los sensores GNSS INS Ellipse-N incorporan una unidad de medición inercial compuesta por acelerómetros, giroscopios y magnetómetros, junto con un GPS y un barómetro.
Nuestra solución proporciona datos robustos de orientación, altitud y navegación en las condiciones más duras gracias a componentes industriales de alta calidad calibrados en dinámica y temperatura (de -40°C a 85°C).
Se utilizó para controlar mejor el vuelo y alcanzar la altitud requerida, y también para desplegar el sistema de recuperación de forma óptima. Ayudó a encontrar la configuración adecuada del cohete y la posición ideal para desplegar los paracaídas para el aterrizaje y la recuperación.
uORocketry ha participado en la SA Cup tanto en 2018 como en 2019. Con su cohete llamado Jackalope, ¡llegaron al TOP 10 este año, ya que se clasificaron en el puesto 8/122!
También se situaron en el 4º puesto de los 47 equipos que competían en su categoría: 10.000 pies de altitud, motor comercial. Más allá de la simple competición, incluso hicieron una presentación sobre su esquema de frenado aéreo, utilizado para una altitud final precisa durante los vuelos.
Acerca de uORocketry
uOttawa Rocketry es un equipo multidisciplinario de ingeniería estudiantil con sede en la universidad fundado en 2016.
Desde entonces, han desarrollado numerosos proyectos aeroespaciales, como un motor de cohete híbrido, un concepto de paracaídas, sistemas de aviónica personalizados e incluso mecanismos de ignición únicos.
Sin embargo, su enfoque principal es la construcción de cohetes.


Ellipse-N
El Ellipse-N es un sistema de navegación inercial (INS) RTK compacto y de alto rendimiento con un receptor GNSS integrado de doble banda y cuatro constelaciones. Proporciona roll, pitch, heading y heave, así como una posición GNSS centimétrica.
El sensor Ellipse-N funciona mejor en entornos dinámicos y en condiciones GNSS adversas. Además, también puede funcionar en aplicaciones de menor dinámica utilizando el heading magnético.

Solicite un presupuesto para el Ellipse-N
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Acepta el INS entradas de sensores de ayuda externos?
Los Sistemas de Navegación Inercial de nuestra empresa aceptan entradas de sensores de ayuda externos, como sensores de datos aéreos, magnetómetros, odómetros, DVL y otros.
Esta integración hace que el INS sea muy versátil y fiable, especialmente en entornos sin cobertura GNSS.
Estos sensores externos mejoran el rendimiento general y la precisión del INS al proporcionar datos complementarios.
¿Cuál es la diferencia entre AHRS e INS?
La principal diferencia entre un sistema de referencia de actitud y rumbo (AHRS) y un sistema de navegación inercial (INS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
El AHRS proporciona información de orientación, concretamente, la actitud (cabeceo, balanceo) y el rumbo (guiñada) de un vehículo o dispositivo. Normalmente, utiliza una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. El AHRS emite la posición angular en tres ejes (cabeceo, balanceo y guiñada), lo que permite a un sistema comprender su orientación en el espacio. A menudo se utiliza en la aviación, los UAV, la robótica y los sistemas marinos para proporcionar datos precisos de actitud y rumbo, que son fundamentales para el control y la estabilización del vehículo.
Un INS no solo proporciona datos de orientación (como un AHRS), sino que también rastrea la posición, la velocidad y la aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio 3D sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en el AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, a menudo integrándose con datos externos como el GNSS para mejorar la precisión.
En resumen, el AHRS se centra en la orientación (actitud y rumbo), mientras que el INS proporciona un conjunto completo de datos de navegación, incluyendo posición, velocidad y orientación.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una Unidad de Medición Inercial (IMU) y un Sistema de Navegación Inercial (INS) radica en su funcionalidad y complejidad.
Una IMU (unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Suministra información sobre el roll, pitch, yaw y el movimiento, pero no calcula datos de posición o navegación. La IMU está específicamente diseñada para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo, con el fin de determinar la posición o la velocidad.
Por otro lado, un INS (sistema de navegación inercial) combina los datos de la IMU con algoritmos avanzados para calcular la posición, velocidad y orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtro de Kalman para la fusión e integración de sensores. Un INS suministra datos de navegación en tiempo real, incluyendo posición, velocidad y orientación, sin depender de sistemas de posicionamiento externos como el GNSS.
Este sistema de navegación se utiliza típicamente en aplicaciones que requieren soluciones de navegación completas, particularmente en entornos sin GNSS (GNSS-denied environments), como UAVs militares, barcos y submarinos.
