uORocketry alcança o Top 10 na SA Cup com INS/GNSS da SBG
A equipe de foguetes da Universidade de Ottawa integra o Sistema de Navegação Inercial Ellipse-N para a Spaceport America Cup.
“A unidade e a expertise fornecidas pela SBG Systems nos ajudaram a chegar mais perto de alcançar um algoritmo de controle otimizado para os freios aerodinâmicos.” | Equipe de foguetes da Universidade de Ottawa

A Universidade de Ottawa participou da Spaceport America Cup
A Spaceport America Cup é a maior competição internacional intercolegial de engenharia de foguetes do mundo, combinando conferências acadêmicas e competição.
Durante a edição de 2019, 1.500 estudantes de mais de 124 equipes lançaram foguetes sólidos, líquidos e híbridos para atingir altitudes de 10.000 e 30.000 pés.

Para sua 2ª participação, a uORocketry, a Equipe de Foguetes da Universidade de Ottawa, prosseguiu para outra iteração em seu projeto de sucesso anterior para melhorar os principais recursos.
Um foguete com um incrível sistema automatizado de frenagem aerodinâmica
O foguete da uORocketry, Jackalope, desfruta de uma vantagem competitiva significativa: seu sistema automatizado de freio aerodinâmico, totalmente controlado por seu computador de bordo. Ele aumenta o arrasto e diminui a velocidade do foguete à medida que se aproxima da altitude.
Um dos principais objetivos da equipe este ano foi a melhoria da confiabilidade do sistema de recuperação.
Para alcançá-lo, eles confiaram em seu sistema de freio aerodinâmico mecanicamente robusto, bem como em um método de controle para acioná-lo de forma eficaz.
O sistema de aviônicos é responsável pelo controle em tempo real dos freios aerodinâmicos, pelo escalonamento do sistema de recuperação e pelo envio de telemetria durante o voo para registro e recuperação de dados.
Melhorando a confiabilidade do sistema de recuperação graças ao Ellipse-N
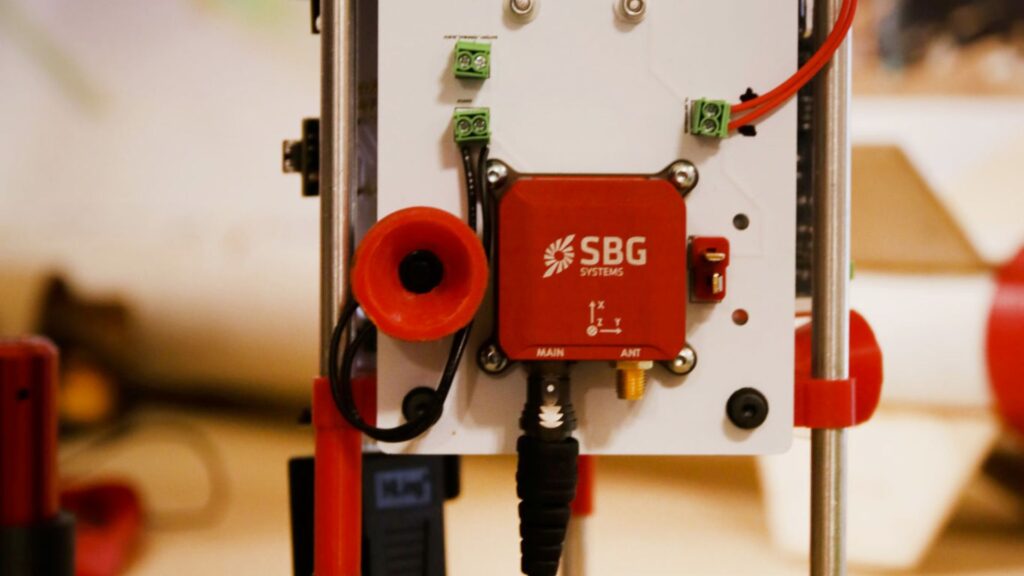
A uORocketry integrou o sistema de navegação inercial Ellipse-N da SBG Systems à sua solução de aviônicos de 2019 a fim de alcançar um algoritmo de controle otimizado para os freios aerodinâmicos.
A equipe integrou essa solução de sensor INS GNSS na placa de alimentação do hardware, utilizando-a para estimativas de estado a fim de determinar o acionamento ideal dos freios aerodinâmicos.
Esquema de frenagem a ar integrando um INS
Os sensores GNSS Ellipse-N INS incorporam uma unidade de medição inercial composta por acelerômetros, giroscópios e magnetômetros, juntamente com um GPS e um barômetro.
Nossa solução fornece dados robustos de orientação, altitude e navegação nas condições mais adversas, graças a componentes de nível industrial de alta qualidade calibrados em dinâmica e temperatura (de -40°C a 85°C).
Foi usado para melhor controlar o voo e atingir a altitude necessária, e também para implantar o sistema de recuperação de forma ideal. Ajudou a encontrar a configuração adequada do foguete e a posição ideal para implantar os paraquedas para pouso e recuperação.
A uORocketry participou da SA Cup em 2018 e 2019. Com seu foguete chamado Jackalope, eles alcançaram o TOP 10 este ano, pois ficaram em 8º/122!
Eles também ficaram em 4º lugar entre as 47 equipes que competiram em sua categoria: altitude de 10.000 pés, motor comercial. Mais do que apenas competir, eles até fizeram uma apresentação sobre seu esquema de frenagem a ar, usado para uma altitude final precisa durante os voos.
Sobre a uORocketry
A uOttawa Rocketry é uma equipe multidisciplinar de engenharia estudantil universitária fundada em 2016.
Desde então, eles desenvolveram inúmeros projetos aeroespaciais, como um motor de foguete híbrido, um conceito de paraquedas, sistemas de aviônicos personalizados e até mesmo mecanismos de ignição exclusivos.
Seu foco principal, no entanto, é construir foguetes.


Ellipse-N
O Ellipse-N é um Sistema de Navegação Inercial (INS) RTK compacto e de alto desempenho com um receptor GNSS de banda dupla e quatro constelações integrado. Ele fornece roll, pitch, heading e heave, bem como uma posição GNSS centimétrica.
O sensor Ellipse-N tem o melhor desempenho em ambientes dinâmicos e condições GNSS adversas. Além disso, ele também pode operar em aplicações dinâmicas mais baixas usando heading magnético.

Solicite uma cotação para o Ellipse-N
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
O INS aceita entradas de sensores auxiliares externos?
Os Sistemas de Navegação Inercial da nossa empresa aceitam entradas de sensores auxiliares externos, como sensores de dados aéreos, magnetômetros, odômetros, DVL e outros.
Essa integração torna o INS altamente versátil e confiável, especialmente em ambientes com GNSS negado.
Esses sensores externos melhoram o desempenho geral e a precisão do INS, fornecendo dados complementares.
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não apenas fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU (unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidas por acelerômetros e giroscópios. Ela fornece informações sobre rolagem (roll), inclinação (pitch), guinada (yaw) e movimento, mas não calcula dados de posição ou navegação. A IMU é especificamente projetada para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou velocidade.
Por outro lado, um INS (sistema de navegação inercial) combina dados da IMU com algoritmos avançados para calcular a posição, velocidade e orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS fornece dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos como o GNSS.
Este sistema de navegação é tipicamente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes com negação de GNSS, como UAVs militares, navios e submarinos.
