uORocketry atteint le Top 10 de la SA Cup avec SBG INS/GNSS
L'équipe de Rocketry de l'Université d'Ottawa intègre le système de navigation inertielle Ellipse-N pour la Spaceport America Cup.
« L'unité et l'expertise fournies par SBG Systems nous ont aidés à nous rapprocher de la réalisation d'un algorithme de contrôle optimisé pour les aérofreins. » | Équipe de Rocketry de l'Université d'Ottawa

L'Université d'Ottawa a participé à la Spaceport America Cup
La Spaceport America Cup est le plus grand concours international interuniversitaire d'ingénierie de fusées au monde, combinant des conférences universitaires et une compétition.
Lors de l'édition 2019, 1 500 étudiants de plus de 124 équipes ont lancé des fusées à propergol solide, liquide et hybride pour atteindre des altitudes cibles de 10 000 et 30 000 pieds.

Pour leur 2e participation, uORocketry, l'équipe de roquettes de l'Université d'Ottawa, a procédé à une autre itération de leur conception précédente réussie afin d'améliorer les principales caractéristiques.
Une fusée dotée d'un incroyable système de freinage aérien automatisé
La fusée uORocketry, Jackalope, bénéficie d'un avantage concurrentiel significatif : son système de freinage aérien automatisé, entièrement contrôlé par son ordinateur de vol embarqué. Il augmente la traînée et ralentit la fusée à l'approche de l'altitude.
L'un des principaux objectifs de l'équipe cette année était l'amélioration de la fiabilité de son système de récupération.
Pour y parvenir, ils se sont appuyés sur leur système de freinage aérien mécaniquement robuste, ainsi que sur une méthode de contrôle pour l'actionner efficacement.
Le système avionique est responsable du contrôle en temps réel des aérofreins, de la mise en place du système de récupération et de l'envoi de la télémétrie pendant le vol pour l'enregistrement des données et la récupération.
Amélioration de la fiabilité du système de récupération grâce à l'Ellipse-N
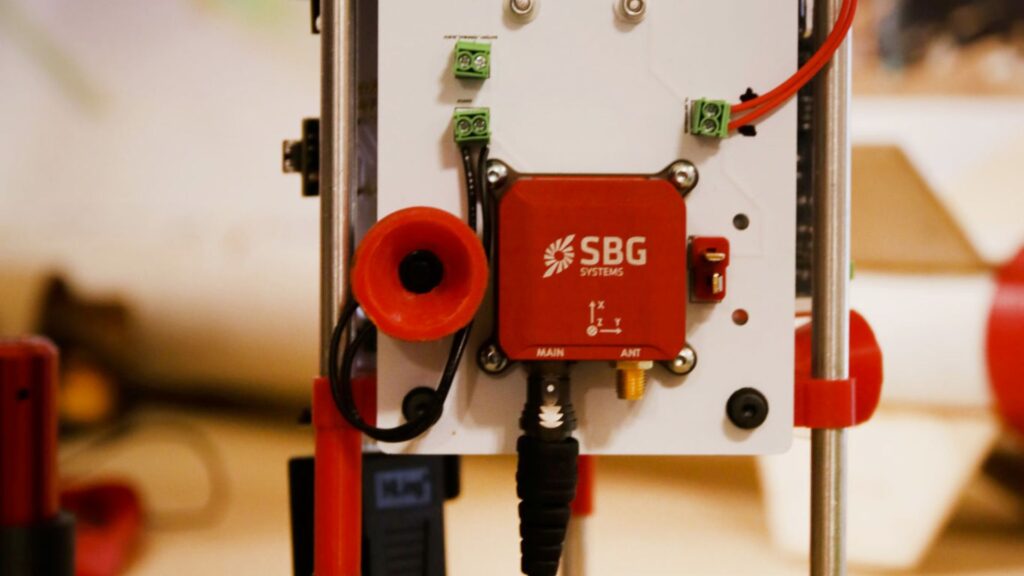
uORocketry a intégré le Système de Navigation Inertielle Ellipse-N de SBG Systems à sa solution avionique de 2019 afin d'obtenir un algorithme de commande optimisé pour les aérofreins.
L'équipe a intégré cette solution de capteur INS GNSS à la carte d'alimentation du matériel, l'utilisant pour les estimations d'état afin de déterminer le déploiement idéal des aérofreins.
Schéma de freinage pneumatique intégrant un INS
Les capteurs INS GNSS Ellipse-N intègrent une centrale inertielle composée d'accéléromètres, de gyroscopes et de magnétomètres, couplée à un GPS et un baromètre.
Notre solution fournit des données robustes d'orientation, d'altitude et de navigation dans les conditions les plus extrêmes, grâce à des composants de qualité industrielle supérieure, calibrés en dynamique et en température (de -40°C à 85°C).
Il a été utilisé pour contrôler au mieux le vol et atteindre l'altitude requise, ainsi que pour déployer le système de récupération de manière optimale. Il a permis de déterminer la configuration appropriée de la fusée et la position idéale pour déployer les parachutes en vue de l'atterrissage et de la récupération.
uORocketry a participé à la SA Cup en 2018 et 2019. Avec leur fusée nommée Jackalope, ils ont atteint le TOP 10 cette année, puisqu'ils se sont classés 8e/122 !
Ils se sont également classés 4e sur les 47 équipes participant à leur catégorie : 10 000 pieds d'altitude, moteur commercial. Plus que de simplement participer, ils ont même fait une présentation sur leur système de freinage pneumatique, utilisé pour une altitude finale précise pendant les vols.
À propos d’uORocketry
uOttawa Rocketry est une équipe d'ingénierie multidisciplinaire basée à l'université et fondée en 2016.
Depuis lors, ils ont développé de nombreux projets aérospatiaux tels qu'un moteur de fusée hybride, un concept de parachute, des systèmes avioniques personnalisés et même des mécanismes d'allumage uniques.
Leur objectif principal, cependant, est de construire des fusées.


Ellipse-N
Ellipse-N est un système de navigation inertielle (INS) RTK compact et performant, doté d'un récepteur GNSS bi-bande et quad-constellations intégré. Il fournit le roulis, le tangage, le cap et le pilonnement, ainsi qu'une position GNSS centimétrique.
Le capteur Ellipse-N est le plus performant dans les environnements dynamiques et les conditions GNSS difficiles. De plus, il peut également fonctionner dans des applications moins dynamiques en utilisant le cap magnétique.

Demander un devis pour l'Ellipse-N
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
L'INS accepte-t-il les entrées de capteurs d'aide externes ?
Les systèmes de navigation inertielle de notre société acceptent les entrées de capteurs d'aide externes, tels que les capteurs de données aériennes, les magnétomètres, les odomètres, le DVL et autres.
Cette intégration rend l'INS très polyvalent et fiable, en particulier dans les environnements où le GNSS est inaccessible.
Ces capteurs externes améliorent les performances globales et la précision de l'INS en fournissant des données complémentaires.
Quelle est la différence entre AHRS et INS ?
La principale différence entre un Attitude and Heading Reference System (AHRS) et un Inertial Navigation System (INS) réside dans leur fonctionnalité et l'étendue des données qu'ils fournissent.
Un AHRS fournit des informations d'orientation, en particulier l'attitude (tangage, roulis) et le cap (lacet) d'un véhicule ou d'un appareil. Il utilise généralement une combinaison de capteurs, notamment des gyroscopes, des accéléromètres et des magnétomètres, pour calculer et stabiliser l'orientation. L'AHRS fournit la position angulaire sur trois axes (tangage, roulis et lacet), ce qui permet à un système de comprendre son orientation dans l'espace. Il est souvent utilisé dans l'aviation, les UAV, la robotique et les systèmes marins pour fournir des données d'attitude et de cap précises, ce qui est essentiel pour le contrôle et la stabilisation du véhicule.
Un INS fournit non seulement des données d'orientation (comme un AHRS), mais suit également la position, la vitesse et l'accélération d'un véhicule dans le temps. Il utilise des capteurs inertiels pour estimer le mouvement dans l'espace 3D sans dépendre de références externes comme le GNSS. Il combine les capteurs présents dans les AHRS (gyroscopes, accéléromètres) mais peut également inclure des algorithmes plus avancés pour le suivi de la position et de la vitesse, souvent en s'intégrant à des données externes comme le GNSS pour une précision accrue.
En résumé, l'AHRS se concentre sur l'orientation (attitude et cap), tandis que l'INS fournit une suite complète de données de navigation, y compris la position, la vitesse et l'orientation.
Quelle est la différence entre une IMU et un INS ?
La différence entre une unité de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU unité de mesure inertielle) fournit des données brutes sur l’accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas les données de position ou de navigation. IMU spécifiquement conçue pour transmettre des données essentielles sur le mouvement et l’orientation en vue d’un traitement externe permettant de déterminer la position ou la vitesse.
D’autre part, un INS système de navigation inertielle) combine IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation tels que le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS des données de navigation en temps réel, notamment la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes tels que GNSS.
Ce système de navigation est généralement utilisé dans des applications nécessitant des solutions de navigation complètes, en particulier dans des environnements GNSS, comme les drones militaires, les navires et les sous-marins.
