uORocketry、SBG INS/GNSSでSA Cupでトップ10入り
オタワ大学のロケットチームは、Spaceport America CupにEllipse-N慣性航法システムを統合しました。
「SBG Systemsが提供してくれたユニットと専門知識は、空力ブレーキの最適化された制御アルゴリズムの実現に近づくのに役立ちました。」 | オタワ大学ロケットチーム

オタワ大学がSpaceport America Cupに参加
Spaceport America Cupは、学術会議と競技会を組み合わせた、世界最大の国際大学対抗ロケット工学コンテストです。
2019年版では、124を超えるチームから1,500人の学生が参加し、固体、液体、ハイブリッドロケットを打ち上げ、10,000フィートと30,000フィートの目標高度を目指しました。

2回目の参加となるuORocketry(オタワ大学ロケットチーム)は、以前の成功した設計をさらに改良し、主要な機能を向上させました。
驚くほど自動化された空力ブレーキシステムを搭載したロケット
uORocketryのロケット、Jackalopeは、オンボードのフライトコンピューターによって完全に制御される自動空力ブレーキシステムという、大きな競争上の優位性を持っています。これは、抗力を増加させ、ロケットが高度に近づくにつれて速度を低下させます。
今年のチームの主な目標の1つは、リカバリーシステムの信頼性を向上させることでした。
それを達成するために、彼らは機械的に堅牢な空力ブレーキシステムと、それを効果的に作動させるための制御方法に頼りました。
アビオニクスシステムは、空力ブレーキのリアルタイム制御、リカバリーシステムのステージング、およびデータロギングとリカバリーのための飛行中のテレメトリー送信を担当します。
Ellipse-Nのおかげで、回収システムの信頼性が向上
uORocketryは、エアブレーキの最適化された制御アルゴリズムを実現するため、2019年のアビオニクスソリューションにSBG SystemsのEllipse-N慣性航法システムを統合しました。
チームは、このINS GNSSセンサーソリューションをハードウェアのパワーボードに統合し、状態推定に利用することで、理想的なエアブレーキの展開を決定しました。
INSを統合した空気ブレーキ方式
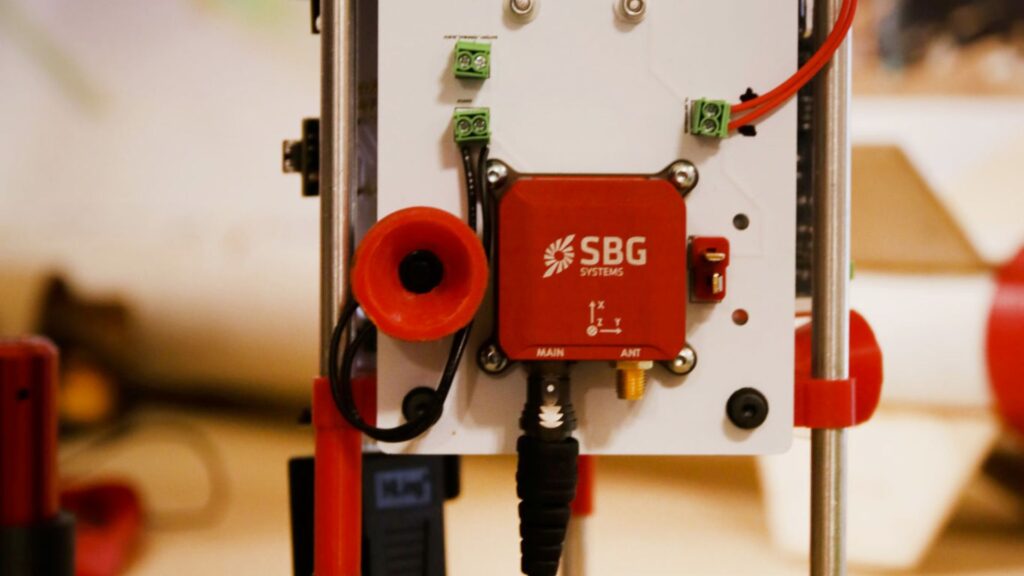
Ellipse-N INS GNSSセンサーは、加速度計、ジャイロスコープ、および磁力計で構成される慣性計測ユニットと、GPSおよび気圧計を内蔵しています。
当社のソリューションは、ダイナミクスおよび温度(-40°C〜85°C)で校正された高品質の工業用グレードのコンポーネントのおかげで、最も過酷な条件下でも堅牢な方位、高度、およびナビゲーションデータを提供します。
飛行を最適に制御し、必要な高度に到達し、回収システムを最適に展開するために使用されました。ロケットの適切な構成と、着陸と回収のためにパラシュートを展開する理想的な位置を見つけるのに役立ちました。
uORocketryは、2018年と2019年の両方でSA Cupに参加しました。Jackalopeという名前のロケットで、今年はTOP 10に到達し、122チーム中8位にランクインしました!
また、カテゴリー(高度10,000フィート、商用モーター)で競う47チーム中4位にもランクインしました。競争するだけでなく、飛行中の正確な最終高度に使用される空力ブレーキ方式に関するプレゼンテーションも行いました。
uORocketryについて
uOttawa Rocketryは、2016年に設立された、学際的な大学ベースの学生エンジニアリングチームです。
それ以来、ハイブリッドロケットエンジン、パラシュートのコンセプト、カスタムアビオニクスシステム、さらには独自の点火メカニズムなど、数多くの航空宇宙プロジェクトを開発してきました。
しかし、彼らの主な焦点はロケットの製造です。


Ellipse-N
Ellipse-Nは、統合されたデュアルバンド、クワッドコンステレーションGNSS受信機を備えた、コンパクトで高性能なRTK慣性航法システム(INS)です。ロール、ピッチ、方位、およびヒーブ、ならびにセンチメートル精度のGNSS位置を提供します。
Ellipse-Nセンサーは、動的な環境や過酷なGNSS条件で最高の性能を発揮します。さらに、磁気方位を使用して、より低いダイナミックアプリケーションでも動作できます。

Ellipse-Nの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
INSは外部支援センサーからの入力を受け入れますか?
当社の慣性航法システムは、空気データセンサー、磁力計、走行距離計、DVL 外部補助センサーからの入力を受け付けます。
この統合により、特にGNSSが利用できない環境において、INSは非常に汎用性が高く信頼性の高いものになります。
これらの外部センサーは、補完的なデータを提供することにより、INSの全体的なパフォーマンスと精度を向上させます。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU(慣性計測ユニット)は、加速度計とジャイロスコープによって測定される車両の線形加速度と角速度に関する生データを提供します。ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データは計算しません。IMUは、位置または速度を決定するための外部処理のために、動きと姿勢に関する重要なデータを中継するように特別に設計されています。
一方で、INS(慣性航法システム)は、IMUデータと高度なアルゴリズムを組み合わせて、時間経過に伴う車両の位置、速度、および姿勢を計算します。センサーフュージョンと統合のために、カルマンフィルタリングのような航法アルゴリズムを組み込んでいます。INSは、GNSSのような外部測位システムに依存することなく、位置、速度、および姿勢を含むリアルタイムの航法データを提供します。
この航法システムは、包括的な航法ソリューションを必要とする用途、特にGNSSが利用できない環境(軍用UAV、船舶、潜水艦など)で一般的に利用されます。
