uORocketry 凭借 SBG INS/GNSS 在 SA Cup 中进入前 10 名
渥太华大学的火箭团队集成了 Ellipse-N 惯性导航系统,用于 Spaceport America Cup。
“SBG Systems 提供的设备和专业知识帮助我们更接近于实现气动刹车的优化控制算法。” | 渥太华大学火箭团队

渥太华大学参加了美国航天港杯
美国航天港杯是世界上最大的国际大学生火箭工程竞赛,结合了学术会议和比赛。
在 2019 年的版本中,来自 124 多个团队的 1,500 名学生发射了固体、液体和混合火箭,目标高度为 10,000 英尺和 30,000 英尺。

渥太华大学火箭团队 uORocketry 第二次参加比赛,他们对之前成功的设计进行了另一次迭代,以改进关键功能。
配备惊人的自动空气制动系统的火箭
uORocketry 的 Jackalope 火箭具有显著的竞争优势:其自动空气制动系统完全由其机载飞行计算机控制。当火箭接近预定高度时,该系统会增加阻力并减慢火箭速度。
今年,该团队的主要目标之一是提高其回收系统的可靠性。
为了实现这一目标,他们依赖于机械上强大的空气制动系统以及有效驱动它的控制方法。
航空电子系统负责空气制动器的实时控制、回收系统的分级以及在飞行期间发送遥测数据,用于数据记录和回收。
借助 Ellipse-N 提高回收系统的可靠性
uORocketry 将 SBG Systems 的 Ellipse-N 惯性导航系统集成到其 2019 年的航空电子解决方案中,以实现气动刹车的优化控制算法。
该团队将这种 INS GNSS 传感器解决方案集成到硬件的电源板中,利用它进行状态估计,以确定理想的气动刹车部署。
集成 INS 的空气制动方案
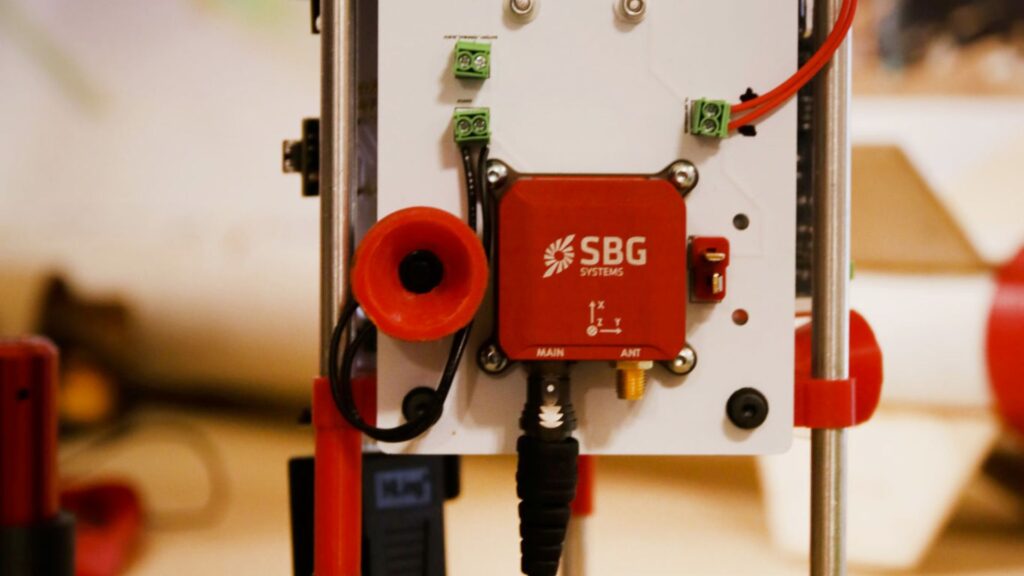
Ellipse-N INS GNSS 传感器内置一个惯性测量单元,该单元由加速度计、陀螺仪和磁力计组成,并与 GPS 和气压计相连。
借助在动态和温度(-40°C 至 85°C)下校准的高质量工业级组件,我们的解决方案可在最恶劣的条件下提供强大的方向、高度和导航数据。
它用于最佳地控制飞行并达到所需的高度,并以最佳方式部署回收系统。它有助于找到火箭的正确配置和理想位置,以部署降落伞进行着陆和回收。
uORocketry 参加了 2018 年和 2019 年的 SA 杯。凭借他们名为 Jackalope 的火箭,他们今年进入了前 10 名,排名第 8/122!
在参加 10,000 英尺高度商业发动机比赛的 47 支队伍中,他们也获得了第 4 名。除了比赛之外,他们甚至还介绍了他们的空气制动方案,该方案用于在飞行过程中实现精确的最终高度。
关于 uORocketry
渥太华大学火箭团队 (uOttawa Rocketry) 成立于 2016 年,是一个由大学生组成的多学科工程团队。
自那时以来,他们开发了许多航空航天项目,例如混合火箭发动机、降落伞概念、定制航空电子系统,甚至还有独特的点火机构。
然而,他们的主要重点是制造火箭。


Ellipse-N
Ellipse-N 是一款紧凑型高性能 RTK 惯性导航系统 (INS),集成了双频、四星座 GNSS 接收器。它提供横滚、纵倾、航向和升沉数据,以及厘米级的 GNSS 位置。
Ellipse-N 传感器在动态环境和恶劣的 GNSS 条件下表现最佳。此外,它还可以使用磁航向在较低动态的应用中运行。

询问 Ellipse-N 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
INS 是否接受来自外部辅助传感器的输入?
我们公司的惯性导航系统接受来自外部辅助传感器(如空速传感器、磁力计、里程计、DVL等)的输入。
这种集成使 INS 具有高度的通用性和可靠性,尤其是在 GNSS 受限的环境中。
这些外部传感器通过提供补充数据来增强 INS 的整体性能和精度。
AHRS 和 INS 之间有什么区别?
姿态和航向参考系统 (AHRS) 与惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供方向数据(如 AHRS),还跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的位置和速度跟踪算法,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。
IMU 和 INS 之间有什么区别?
惯性测量单元 (IMU) 与惯性导航系统 (INS) 之间的区别在于它们的功能和复杂性。
IMU(惯性测量单元)提供由加速度计和陀螺仪测量的车辆线加速度和角速度原始数据。它提供横摇、纵倾、偏航和运动信息,但不计算位置或导航数据。IMU 专门设计用于传输关于运动和姿态的关键数据,供外部处理以确定位置或速度。
另一方面,INS(惯性导航系统)将 IMU 数据与先进算法结合,以计算车辆随时间变化的位置、速度和姿态。它集成了卡尔曼滤波等导航算法,用于传感器融合和集成。INS 提供实时导航数据,包括位置、速度和姿态,无需依赖 GNSS 等外部定位系统。
这种导航系统通常用于需要全面导航解决方案的应用中,特别是在 GNSS 拒止环境中,例如 军用无人机、船舶和潜艇。
