uORocketry erreicht die Top 10 im SA Cup mit SBG INS/GNSS
Das Raketenteam der Ottawa University integriert das Ellipse-N Inertial Navigation System für den Spaceport America Cup.
“Die Einheit und das Fachwissen, das SBG Systems zur Verfügung stellte, halfen uns, der Erreichung eines optimierten Steuerungsalgorithmus für die Bremsklappen näher zu kommen.” | Raketenteam der Ottawa University

Die University of Ottawa nahm am Spaceport America Cup teil.
Der Spaceport America Cup ist der weltweit größte internationale interuniversitäre Raketentechnik-Wettbewerb, der akademische Konferenzen und Wettbewerb miteinander verbindet.
Während der Ausgabe 2019 starteten 1.500 Studenten von mehr als 124 Teams Feststoff-, Flüssigkeits- und Hybridraketen, um Zielhöhen von 10.000 und 30.000 Fuß zu erreichen.

Für ihre zweite Teilnahme setzte uORocketry, das Raketenteam der University of Ottawa, eine weitere Iteration ihres zuvor erfolgreichen Designs ein, um wichtige Funktionen zu verbessern.
Eine Rakete mit einem erstaunlichen automatischen Luftbremssystem
Die uORocketry-Rakete Jackalope genießt einen bedeutenden Wettbewerbsvorteil: ihr automatisches Luftbremssystem, das vollständig von ihrem Bordflugcomputer gesteuert wird. Es erhöht den Luftwiderstand und verlangsamt die Rakete, wenn sie sich der Höhe nähert.
Eines der Hauptziele des Teams in diesem Jahr war die Verbesserung der Zuverlässigkeit ihres Bergungssystems.
Um dies zu erreichen, verließen sie sich auf ihr mechanisch robustes Luftbremssystem sowie auf eine Steuerungsmethode, um es effektiv zu betätigen.
Das Avioniksystem ist für die Echtzeitsteuerung der Luftbremsen, die Stufung des Bergungssystems und das Senden von Telemetriedaten während des Fluges zur Datenerfassung und Bergung verantwortlich.
Verbesserung der Zuverlässigkeit des Bergungssystems dank der Ellipse-N
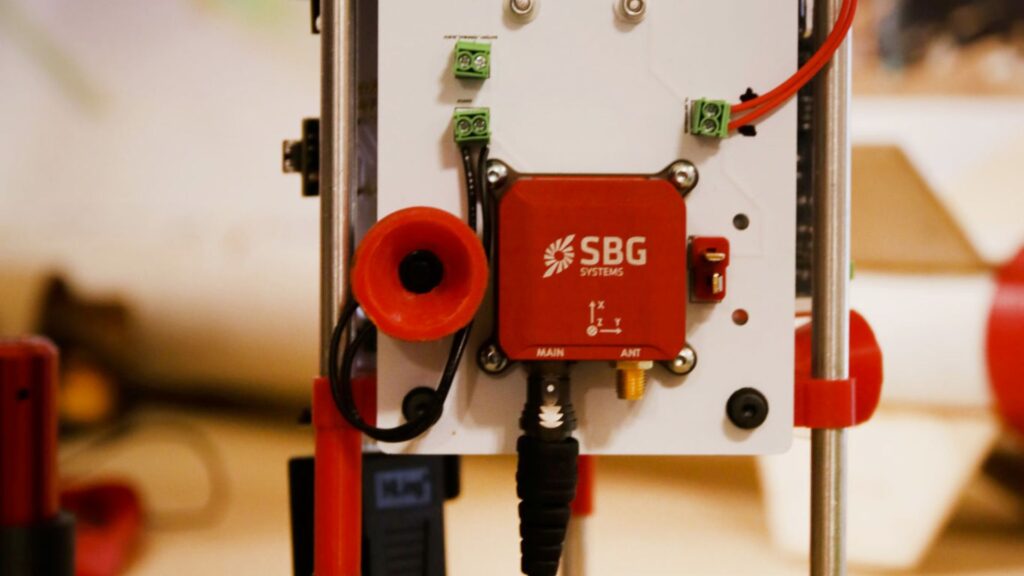
uORocketry integrierte das Ellipse-N INS von SBG Systems in ihre Avioniklösung von 2019, um einen optimierten Regelalgorithmus für die Bremsklappen zu erzielen.
Das Team integrierte diese INS GNSS Sensorlösung in die Power-Board der Hardware und nutzte sie für Zustandsschätzungen, um den idealen Einsatz der Bremsklappen zu bestimmen.
Luftbremsanlage mit integriertem INS
Die Ellipse-N INS GNSS-Sensoren beinhalten eine Inertial Measurement Unit, die aus Beschleunigungsmessern, Gyroskopen und Magnetometern besteht, gekoppelt mit einem GPS und einem Barometer.
Unsere Lösung bietet dank hochwertiger Industriekomponenten, die dynamisch und temperaturkalibriert sind (von -40 °C bis 85 °C), robuste Orientierungs-, Höhen- und Navigationsdaten unter härtesten Bedingungen.
Sie wurde verwendet, um den Flug optimal zu steuern und die erforderliche Höhe zu erreichen sowie das Bergungssystem optimal einzusetzen. Sie half, die richtige Konfiguration und die ideale Position der Rakete zu finden, um die Fallschirme für die Landung und Bergung auszulösen.
uORocketry hat sowohl 2018 als auch 2019 am SA Cup teilgenommen. Mit ihrer Rakete namens Jackalope erreichten sie dieses Jahr die TOP 10 und belegten den 8. von 122 Plätzen!
Sie belegten außerdem den 4. Platz von 47 Teams, die in ihrer Kategorie antraten: 10.000 Fuß Höhe, kommerzieller Motor. Sie haben nicht nur an Wettbewerben teilgenommen, sondern sogar eine Präsentation über ihr Luftbremssystem gehalten, das für eine präzise Endhöhe während der Flüge verwendet wird.
Über uORocketry
uOttawa Rocketry ist ein multidisziplinäres studentisches Ingenieurteam der Universität, das 2016 gegründet wurde.
Seitdem haben sie zahlreiche Luft- und Raumfahrtprojekte entwickelt, wie z. B. ein Hybridraketentriebwerk, ein Fallschirmkonzept, kundenspezifische Avioniksysteme und sogar einzigartige Zündmechanismen.
Ihr Hauptaugenmerk liegt jedoch auf dem Bau von Raketen.


Ellipse-N
Ellipse-N ist ein kompaktes und leistungsstarkes RTK Inertial Navigation System (INS) mit einem integrierten Dualband-Quad-Konstellations-GNSS-Empfänger. Es bietet Roll-, Nick-, Kurs- und Heave-Daten sowie eine zentimetergenaue GNSS-Position.
Der Ellipse-N Sensor funktioniert am besten in dynamischen Umgebungen und unter schwierigen GNSS-Bedingungen. Darüber hinaus kann er auch in Anwendungen mit geringerer Dynamik mit magnetischer Kurssteuerung betrieben werden.

Fordern Sie ein Angebot für Ellipse-N an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Akzeptiert das INS Eingaben von externen Hilfssensoren?
Inertiale Navigationssysteme unseres Unternehmens akzeptieren Eingaben von externen Hilfssensoren wie Luftdatensensoren, Magnetometern, Odometern, DVL und anderen.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in GNSS-abgelehnten Umgebungen.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS, indem sie ergänzende Daten liefern.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die Lage (Nick-, Rollwinkel) und den Kurs (Gierwinkel) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, darunter Gyroskope, Beschleunigungsmesser und Magnetometer, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick-, Roll- und Gierwinkel) aus, wodurch ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, bei UAVs, in der Robotik und in Marinesystemen eingesetzt, um genaue Lage- und Kursdaten zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Zeitverlauf. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum zu schätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die in AHRS (Gyroskope, Beschleunigungsmesser) enthaltenen Sensoren, kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten und sich oft mit externen Daten wie GNSS integrieren, um die Genauigkeit zu verbessern.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Kurs) konzentriert, während INS eine vollständige Suite von Navigationsdaten einschließlich Position, Geschwindigkeit und Orientierung bereitstellt.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Inertial Measurement Unit (IMU) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU (Inertiale Messeinheit) liefert Rohdaten über die lineare Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, gemessen von Beschleunigungssensoren und Gyroskopen. Sie liefert Informationen über Roll-, Nick- und Gierbewegungen sowie die allgemeine Bewegung, berechnet jedoch keine Positions- oder Navigationsdaten. Die IMU ist speziell darauf ausgelegt, wesentliche Daten über Bewegung und Orientierung weiterzuleiten, die extern verarbeitet werden, um Position oder Geschwindigkeit zu bestimmen.
Ein INS (Inertial Navigation System) hingegen kombiniert IMU-Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Orientierung eines Fahrzeugs über die Zeit zu berechnen. Es integriert Navigationsalgorithmen wie die Kalman-Filterung zur Sensorfusion und -integration. Ein INS liefert Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Orientierung, ohne auf externe Positionierungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in GNSS-verweigerten Umgebungen, wie militärischen UAVs, Schiffen und U-Booten.
