uORocketry raggiunge la Top 10 nella SA Cup con SBG INS/GNSS
Il team di Rocketry dell'Università di Ottawa integra il sistema di navigazione inerziale Ellipse-N per la Spaceport America Cup.
"L'unità e l'esperienza fornite da SBG Systems ci hanno aiutato ad avvicinarci al raggiungimento di un algoritmo di controllo ottimizzato per gli aerofreni." | Team di Rocketry dell'Università di Ottawa

L'University of Ottawa ha partecipato alla Spaceport America Cup
La Spaceport America Cup è la più grande competizione internazionale interuniversitaria di ingegneria missilistica al mondo, che unisce conferenze accademiche e competizioni.
Durante l'edizione del 2019, 1.500 studenti provenienti da più di 124 team hanno lanciato razzi a propellente solido, liquido e ibrido per raggiungere altitudini target di 10.000 e 30.000 piedi.

Per la loro seconda partecipazione, uORocketry, il team di Rocketry dell'Università di Ottawa, ha proceduto con un'altra iterazione sul loro progetto precedentemente di successo per migliorare le caratteristiche chiave.
Un razzo con un fantastico sistema automatizzato di frenata ad aria
Il razzo uORocketry, Jackalope, gode di un significativo vantaggio competitivo: il suo sistema automatizzato di aerofrenatura, completamente controllato dal computer di bordo. Aumenta la resistenza aerodinamica e rallenta il razzo quando si avvicina all'altitudine.
Uno dei principali obiettivi del team quest'anno è stato il miglioramento dell'affidabilità del sistema di recupero.
Per raggiungerlo, si sono affidati al loro sistema di aerofrenatura meccanicamente robusto, nonché a un metodo di controllo per azionarlo efficacemente.
Il sistema avionico è responsabile del controllo in tempo reale degli aerofreni, della messa in scena del sistema di recupero e dell'invio di telemetria durante il volo per la registrazione e il recupero dei dati.
Miglioramento dell'affidabilità del sistema di recupero grazie all'Ellipse-N
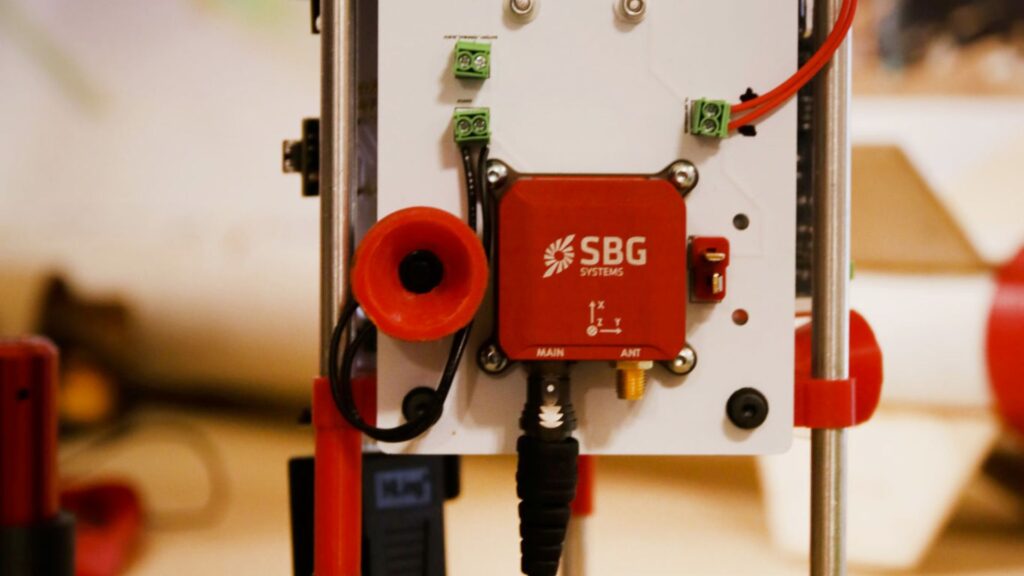
uORocketry ha integrato il sistema di navigazione inerziale Ellipse-N di SBG Systems nella loro soluzione avionica del 2019 al fine di ottenere un algoritmo di controllo ottimizzato per gli aerofreni.
Il team ha integrato questa soluzione sensore INS GNSS nella scheda di alimentazione dell'hardware, utilizzandola per le stime di stato al fine di determinare il dispiegamento ideale degli aerofreni.
Schema di aerofreno che integra un INS
Il sensore GNSS Ellipse-N INS integra un'unità di misura inerziale composta da accelerometri, giroscopi e magnetometri, accoppiata a un GPS e a un barometro.
La nostra soluzione fornisce dati robusti di orientamento, altitudine e navigazione anche nelle condizioni più estreme, grazie a componenti di alta qualità di grado industriale, calibrati in dinamica e temperatura (da -40°C a 85°C).
È stato utilizzato per controllare al meglio il volo e raggiungere l'altitudine richiesta, oltre che per dispiegare in modo ottimale il sistema di recupero. Ha contribuito a trovare la configurazione corretta e la posizione ideale del razzo per il dispiegamento dei paracadute per l'atterraggio e il recupero.
uORocketry ha partecipato alla SA Cup sia nel 2018 che nel 2019. Con il loro razzo chiamato Jackalope, quest'anno hanno raggiunto la TOP 10, classificandosi all'8° posto su 122!
Si sono anche classificati al 4° posto su 47 team in competizione nella loro categoria: 10.000 piedi di altitudine, motore commerciale. Oltre a competere, hanno anche tenuto una presentazione sul loro sistema di frenata aerodinamica, utilizzato per un'altitudine finale precisa durante i voli.
Informazioni su uORocketry
uOttawa Rocketry è un team di ingegneria multidisciplinare universitario fondato nel 2016.
Da allora, hanno sviluppato numerosi progetti aerospaziali come un motore a razzo ibrido, un concetto di paracadute, sistemi avionici personalizzati e persino meccanismi di accensione unici.
Il loro obiettivo principale, tuttavia, è la costruzione di razzi.


Ellipse-N
Ellipse-N è un sistema di navigazione inerziale RTK (INS) compatto e ad alte prestazioni con un ricevitore GNSS integrato Dual band, Quad Constellations. Fornisce rollio, beccheggio, direzione e heave, nonché una posizione GNSS centimetrica.
Il sensore Ellipse-N offre le migliori prestazioni in ambienti dinamici e in condizioni GNSS difficili. Inoltre, può funzionare anche in applicazioni meno dinamiche utilizzando la direzione magnetica.

Richiedi un preventivo per Ellipse-N
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
L'INS accetta input da sensori di ausilio esterni?
I sistemi di navigazione inerziale della nostra azienda accettano input da sensori di ausilio esterni, come sensori di dati aerei, magnetometri, odometri, DVL e altri.
Questa integrazione rende l'INS altamente versatile e affidabile, specialmente in ambienti privi di GNSS.
Questi sensori esterni migliorano le prestazioni complessive e la precisione dell'INS fornendo dati complementari.
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
