Kompaktes Inertialnavigationssystem zur autonomen Navigation
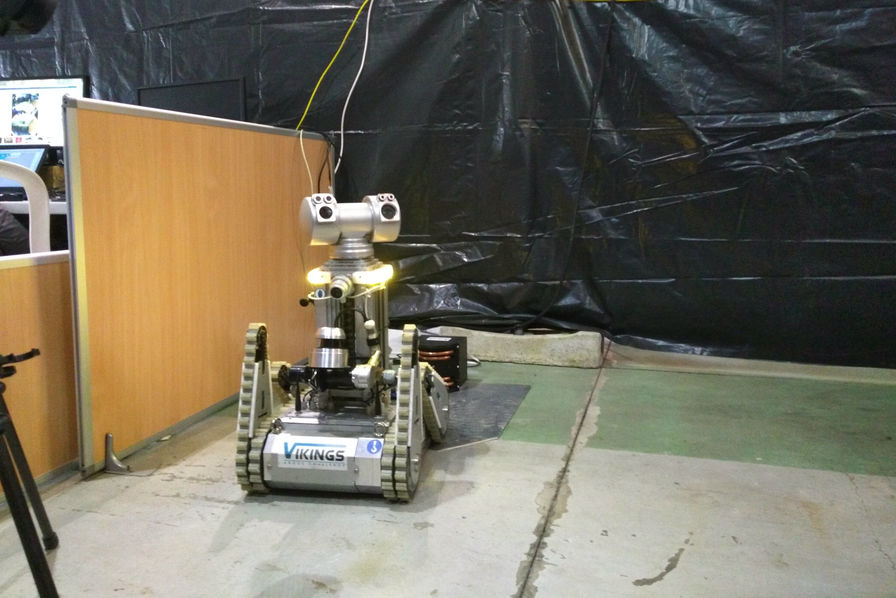
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
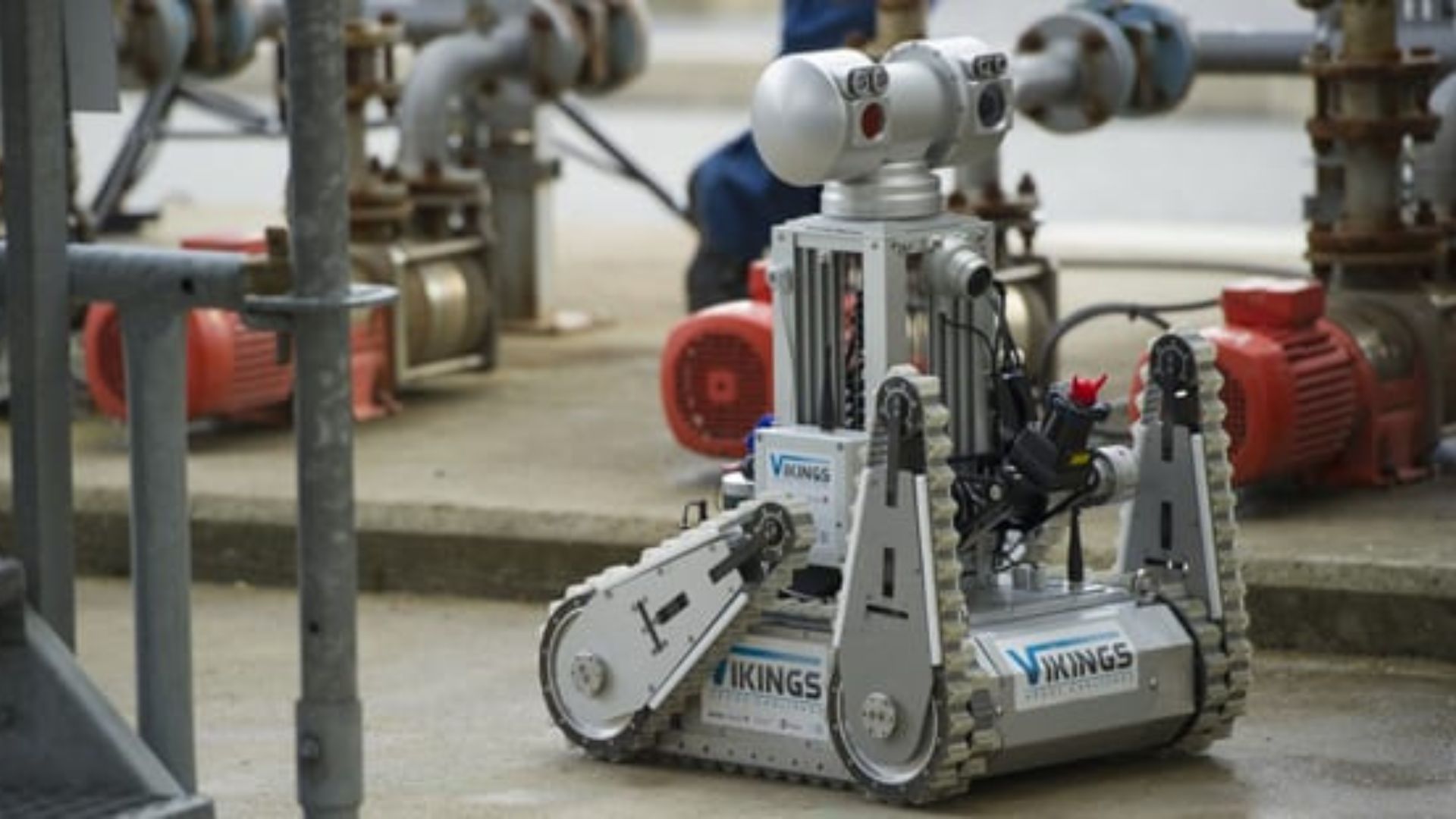
Autonomer Roboter für Öl- und Gasstandorte
Die im Dezember 2013 gestartete ARGOS (Autonomous Robot for Gas and Oil Sites) Challenge wird von der Öl- und Gasgesellschaft TOTAL zusammen mit der französischen Nationalen Forschungsagentur (ANR) organisiert.
Ziel ist es, in weniger als drei Jahren eine neue Generation autonomer Roboter hervorzubringen, die in der Lage sind, Inspektionsaufgaben durchzuführen, Anomalien zu erkennen und auf Notfälle zu reagieren. Ziel dieses Wettbewerbs ist der Bau eines autonomen Roboters, der sich auf Öl- und Gasstandorten bewegen kann, um die Sicherheit der TOTAL-Betreiber zu erhöhen.
Datenfusion von mehreren Sensoren
Der Roboter von VIKINGS berechnet seine Position dank der Fusion von Odometrie-Vorhersage und Inertialsensordaten. Diese Informationen werden dann mit Daten der beiden LiDAR korrigiert (der erste ist vorne und der andere hinten positioniert, für ein Sichtfeld von 360 °).
Der Roboter ist mit Raupen ausgestattet, so dass der Roboter beim Drehen rutscht. Diese Art von Fahrzeug führt zu einer besonders schlechten Odometrie-Genauigkeit. Das Trägheitssystem ist daher unerlässlich, um das Heading zu berechnen. Roll und Pitch werden von der Ellipse-A bezogen und vollständig anvertraut.
Zentimetergenaue Positionierung erreichen
Bereits zufrieden mit den Produkten von SBG Systems, war die Wahl natürlich das Ellipse-A Attitude and Heading Reference System. “Es bietet eine sehr gute Pitch- und Roll-Leistung dank driftarmer Gyros”, sagt Herr Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“Die Ellipse-A bietet dank der Gyroskope mit geringer Drift eine sehr gute Nick- und Rollleistung” | Herr Merriaux


Ellipse-A
Ellipse-A ist ein erschwingliches und leistungsstarkes Attitude and Heading Reference System (AHRS). Es beinhaltet eine erstklassige magnetische Kalibrierungsprozedur für optimales Heading und ist für Anwendungen mit niedriger bis mittlerer Dynamik geeignet.
Das werkseitig von -40°C bis 85°C kalibrierte, robuste Inertialbewegungssensor liefert Roll-, Pitch-, Heading- und Heave-Daten.

Angebot für Ellipse-A anfordern
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen – insbesondere die lage (Nick, Roll) und das Heading (Gier) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, einschließlich Gyroskopen, Beschleunigungsmessern und Magnetometern, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick, Roll und Gier) aus, sodass ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, in UAVs, in der Robotik und in maritimen Systemen verwendet, um genaue lage- und Heading-Daten bereitzustellen, die für die Fahrzeugsteuerung und -stabilisierung von entscheidender Bedeutung sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Laufe der Zeit. Es verwendet Trägheitssensoren, um Bewegungen im 3D-Raum zu schätzen, ohne sich auf externe Referenzen wie GNSS zu verlassen. Es kombiniert die in AHRS (Gyroskope, Beschleunigungsmesser) enthaltenen Sensoren, kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten, die oft mit externen Daten wie GNSS für eine höhere Genauigkeit integriert werden.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Heading) konzentriert, während INS eine vollständige Suite von Navigationsdaten bereitstellt, einschliesslich Position, Geschwindigkeit und Orientierung.
Was ist Precise Point Positioning?
Precise Point Positioning (PPP) ist eine Satellitennavigationstechnik, die hochpräzise Positionierung durch Korrektur von Satellitensignalfehlern bietet. Im Gegensatz zu traditionellen GNSS-Verfahren, die oft auf bodengestützten Referenzstationen basieren (wie bei RTK), nutzt PPP globale Satellitendaten und fortschrittliche Algorithmen, um genaue Standortinformationen zu liefern.
PPP funktioniert überall auf der Welt, ohne dass lokale Referenzstationen erforderlich sind. Dies macht es für Anwendungen in abgelegenen oder schwierigen Umgebungen geeignet, in denen keine Bodeninfrastruktur vorhanden ist. Durch die Verwendung präziser Satellitenorbit- und Taktdaten sowie Korrekturen für atmosphärische und Multipath-Effekte minimiert PPP häufige GNSS-Fehler und kann eine Genauigkeit im Zentimeterbereich erreichen.
Während PPP für die Post-Processing-Positionierung verwendet werden kann, bei der gesammelte Daten im Nachhinein analysiert werden, kann es auch Echtzeit-Positionierungslösungen bereitstellen. Echtzeit-PPP (RTPPP) ist zunehmend verfügbar, sodass Benutzer Korrekturen empfangen und ihre Position in Echtzeit bestimmen können.