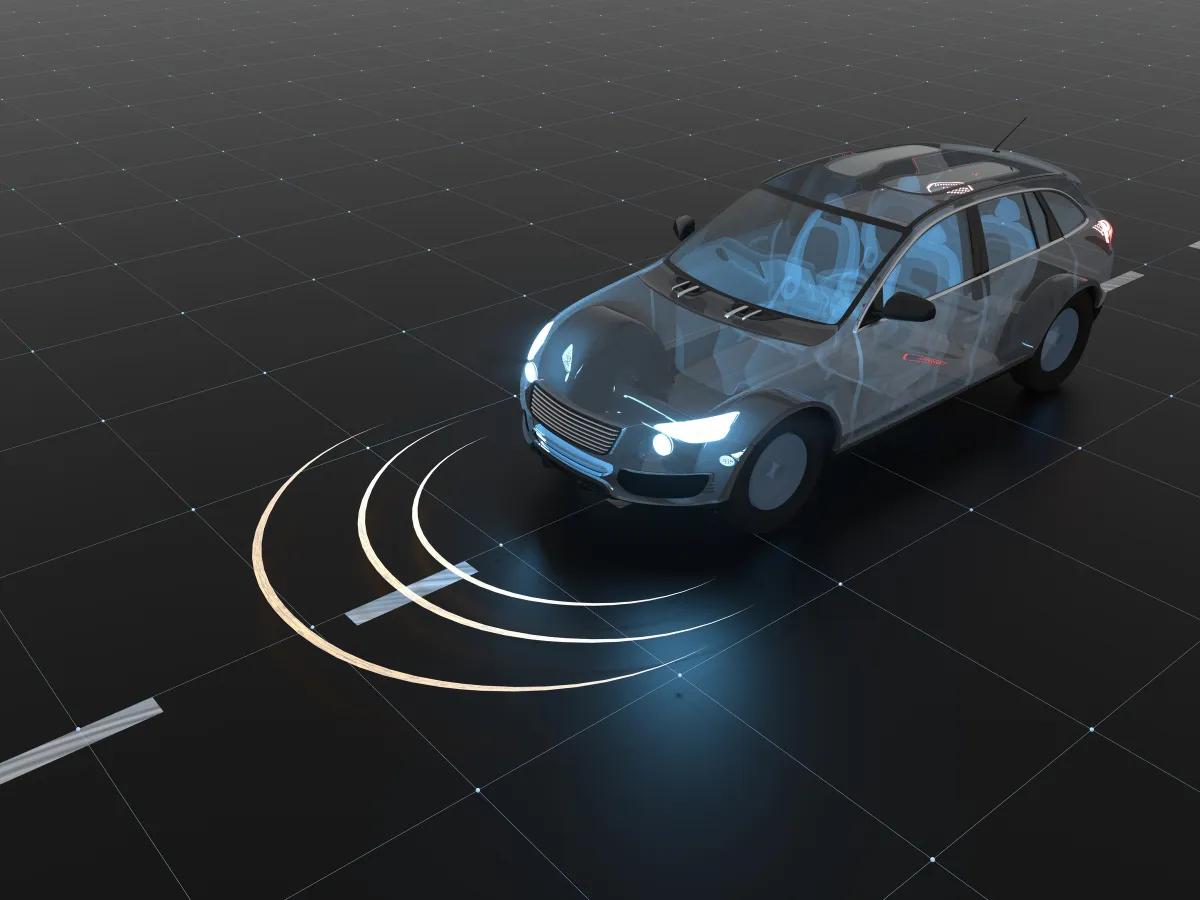
Accurate navigation & positioning for autonomous vehicles
Our motion and navigation sensors offer numerous advantages for Advanced Driver Assistance Systems (ADAS) and autonomous vehicles, contributing to enhanced safety, precision, and performance. These sensors integrate advanced technologies like Inertial Navigation Systems (INS) and GNSS (Global Navigation Satellite System) to provide real-time, highly accurate data on vehicle positioning, motion, and orientation, even in challenging environments.
We are renowned for our expertise in sensor engineering, extensive calibration techniques, and filtering algorithms. Our INS, combine data from accelerometers, gyroscopes, and GNSS to provide highly accurate and reliable positioning information.
Our technology is cornerstone to map the roads and surroundings with high accuracy and allow vehicles to navigate complex environments, accurately follow predefined routes and operate safely.
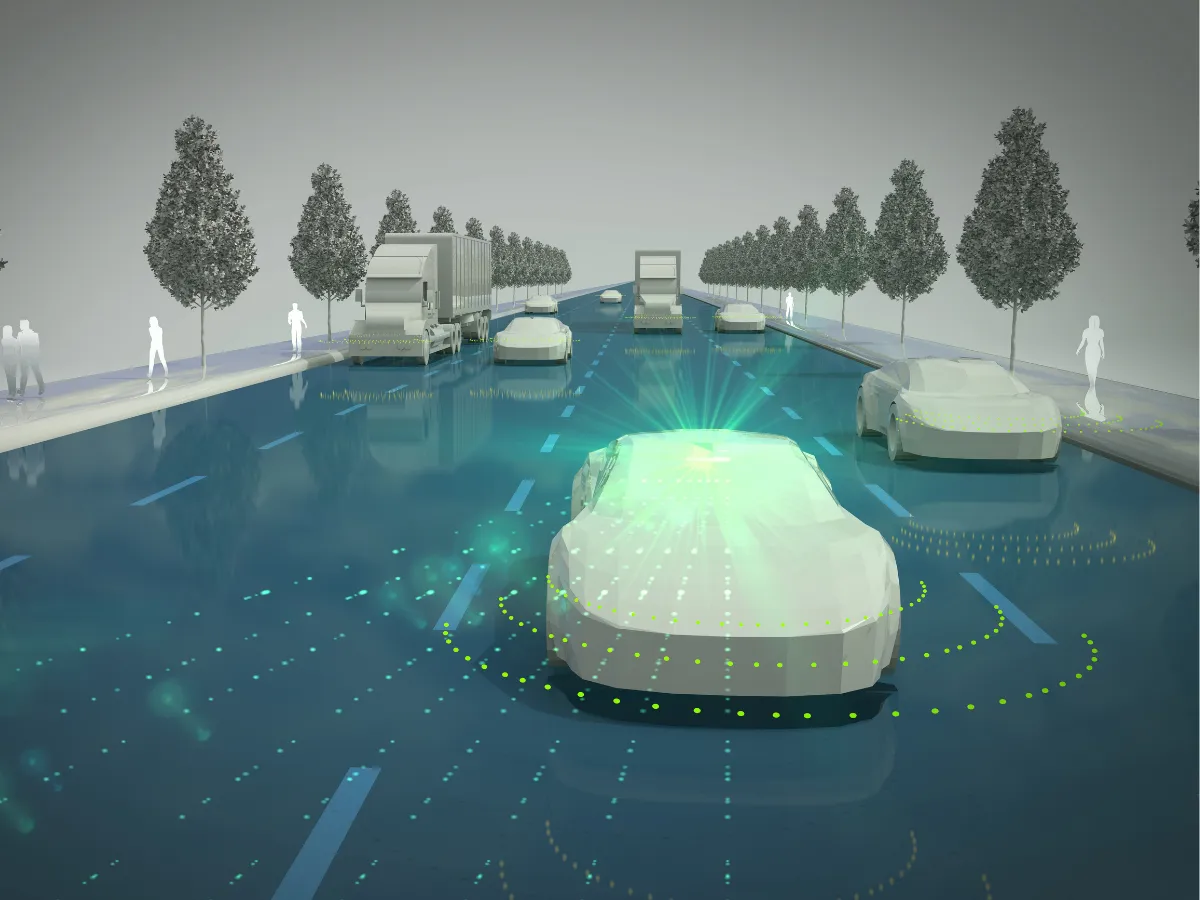
Enhanced sensor fusion and reliable performance in all conditions
INS data is fused with GNSS, cameras, LiDAR, radar, and other sensors to create a robust and reliable perception system. This fusion enables precise and resilient localization, which is essential for lane keeping, vehicles dynamics control, and autonomous driving while improving safety and reliability.
Autonomous and ADAS technologies require consistent performance regardless of environmental conditions. All our sensors are engineered for robust operation in harsh environments (temperatures and vibrations) and complex GNSS signals reception where our INS solutions ensure continuous navigation when satellite signals reception is challenged entering tunnels, parking garages, or driving in urban areas around tall buildings.
Enhancing localization and map-matching accuracy
Our inertial navigation systems use a combination of accelerometers and gyroscopes to measure a vehicle’s acceleration and angular velocity without relying on external GNSS signals. When paired with GNSS in a tightly coupled sensor fusion algorithm, it provides a continuous, highly accurate trajectory, even during GNSS outages.
For ADAS applications, this real-time reliability is critical: With an integrated INS+GNSS system, the INS keeps a steady path even when signals are lost, providing accurate directions and location data to help the vehicle’s alignment with the correct road segment on the High-Definition (HD) map. The combined system enables precise localization, which is essential for the vehicle to understand its exact position relative to road features or doing unsafe maneuvers due to GNSS outliers.

Solutions for ADAS systems
Our GNSS/INS sensors deliver accurate position, velocity, and orientation data in real time. They ensure reliable performance even inside tunnels or urban canyons. With robust calibration, low latency, and easy integration, our solutions support safer, smarter, and more autonomous vehicles or ADAS systems.

Ellipse-D

Ekinox Micro

Ekinox-D
Vehicles application brochure
Our brochures provide comprehensive insights to meet your needs. Designed to be both informative and engaging, they serve as a valuable resource for customers, partners, and stakeholders alike.
Our use cases
SBG Systems supports the development and validation of Advanced Driver Assistance Systems (ADAS) with high-precision inertial navigation solutions.
Discover how our clients have integrated our technology to enhance safety, performance, and innovation in ADAS applications.






They talk about us
Discover how customers and industry leaders recognize SBG Systems as a pioneer in inertial solutions. They value our expertise in autonomous vehicle applications and ADAS. Our innovative technology combines high-performance inertial sensors with advanced GNSS capabilities. It sets the standard for precision and reliability in complex driving environments.
Explore other autonomous vehicles applications
SBG Systems’ inertial navigation solutions support many autonomous vehicle applications beyond traditional passenger cars. Our sensors enable precise positioning, orientation, and motion data for unmanned ground vehicles and delivery robots. They also serve autonomous shuttles and industrial machines with real-time performance. Even in GNSS-denied environments, our technology ensures reliable navigation and control.
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most frequent questions about the ADAS systems application we highlight. If you don’t find what you’re looking for, feel free to contact us directly!
What is the difference between ADAS in cars and self-driving cars?
ADAS (Advanced Driver Assistance Systems) enhances driving safety by providing features like lane-keeping, adaptive cruise control, and automatic braking, but requires active driver supervision. In contrast, self-driving cars, equipped with autonomous driving systems, aim to fully automate vehicle operation without human intervention.
While ADAS supports drivers by assisting with tasks and improving safety, self-driving cars are designed to handle all aspects of autonomous driving, from navigation to decision-making, offering a higher level of automation (SAE levels) and convenience. ADAS characteristics or features are attributed to SAE levels below 3 and self-driving cars as such correspond to minimum level 4.
What is a gyroscope ?
A gyroscope is a sensor that measures angular velocity—the rate at which an object rotates around one or more axes—and is one of the foundational building blocks of inertial navigation systems. Its core purpose is to provide precise, real-time information about rotational motion so that an INS or IMU can determine how an object’s orientation evolves over time.
Modern gyroscopes used in navigation, especially in aerospace, defense, marine, and robotics, are typically MEMS (Micro-Electro-Mechanical Systems) or optical technologies like FOG (Fiber Optic Gyroscopes) and RLG (Ring Laser Gyroscopes). While their physical principles differ, they all exploit the same fundamental concept: when a system rotates, the sensor detects the resulting inertial effect and converts it into an electrical signal.
In a MEMS gyroscope, tiny vibrating structures—often silicon masses driven at specific resonance frequencies—experience Coriolis forces when the device rotates. These forces cause measurable changes in vibration patterns, which are translated into angular rate information. In optical gyros, light traveling in opposite directions along a closed loop experiences phase shifts when the system rotates; this Sagnac effect enables extremely accurate and drift-stable rotation measurements without any moving parts.
Gyroscopes feed crucial data into an inertial navigation system’s algorithms, allowing the system to compute attitude (roll, pitch, and yaw). When combined with accelerometers, they form an IMU, which provides comprehensive motion sensing capability. High-quality gyroscopes reduce drift, enhance stability, and allow the navigation system to function reliably even in GPS-denied environments. In applications such as UAV guidance, loitering munitions, AUV control, maritime heave compensation, or autonomous vehicle navigation, the gyroscope’s accuracy directly impacts the system’s ability to maintain a precise and stable trajectory.
What is relative position ?
Relative position refers to the displacement of a moving platform measured with respect to a known starting point rather than an absolute geographic coordinate system. Instead of expressing location in terms of latitude, longitude, and altitude, relative position describes how far and in what direction the platform has moved from its initial reference frame.
An INS computes this by integrating measured accelerations and rotation rates over time: the accelerometers determine changes in velocity, and these velocities are then integrated again to obtain changes in position, all expressed within a defined coordinate frame such as the body frame or a local navigation frame.
Because relative position does not rely on external signals—GNSS, radio beacons, or landmarks—it is extremely valuable in GPS-denied environments, indoor operations, underwater navigation, or any mission where only the motion since the last known point is required.
However, the accuracy of relative position degrades over time due to drift caused by sensor biases and noise, which is why INS solutions often combine inertial data with aiding sources like GNSS, odometers, DVLs, or barometers to bound error growth. Ultimately, relative position provides a continuous and autonomous way to track movement, forming the backbone of dead reckoning, guidance, and control systems in many aerospace, marine, and robotic applications.
