uORocketry osiąga pierwszą dziesiątkę w SA Cup z SBG INS/GNSS
Drużyna rakietowa Ottawa University integruje inercyjny system nawigacyjny Ellipse-N na zawody Spaceport America Cup.
“Urządzenie i wiedza specjalistyczna zapewniona przez SBG Systems pomogły nam zbliżyć się do osiągnięcia zoptymalizowanego algorytmu sterowania dla hamulców aerodynamicznych.” | Drużyna rakietowa Ottawa University

University of Ottawa uczestniczył w Spaceport America Cup
Spaceport America Cup to największy na świecie międzynarodowy konkurs inżynierii rakietowej dla studentów, łączący konferencje naukowe i zawody.
Podczas edycji w 2019 roku 1500 studentów z ponad 124 zespołów wystrzeliło rakiety na paliwo stałe, ciekłe i hybrydowe, aby osiągnąć docelowe wysokości 10 000 i 30 000 stóp.

Podczas drugiego udziału uORocketry, drużyna rakietowa University of Ottawa, przystąpiła do kolejnej iteracji swojego wcześniejszego, udanego projektu, aby ulepszyć kluczowe funkcje.
Rakieta z niesamowitym, automatycznym systemem hamowania aerodynamicznego
Rakieta uORocketry, Jackalope, ma znaczącą przewagę konkurencyjną: automatyczny system hamowania aerodynamicznego, w pełni kontrolowany przez pokładowy komputer lotu. Zwiększa on opór i spowalnia rakietę, gdy zbliża się ona do zadanej wysokości.
Jednym z głównych celów zespołu w tym roku było zwiększenie niezawodności systemu odzyskiwania.
Aby to osiągnąć, polegali na swoim mechanicznie niezawodnym systemie hamowania aerodynamicznego, a także na metodzie sterowania, która umożliwia jego efektywne uruchamianie.
System awioniki jest odpowiedzialny za sterowanie w czasie rzeczywistym hamulcami aerodynamicznymi, uruchamianie systemu odzyskiwania oraz wysyłanie danych telemetrycznych podczas lotu w celu rejestrowania danych i odzyskiwania.
Zwiększenie niezawodności systemu odzyskiwania dzięki Ellipse-N
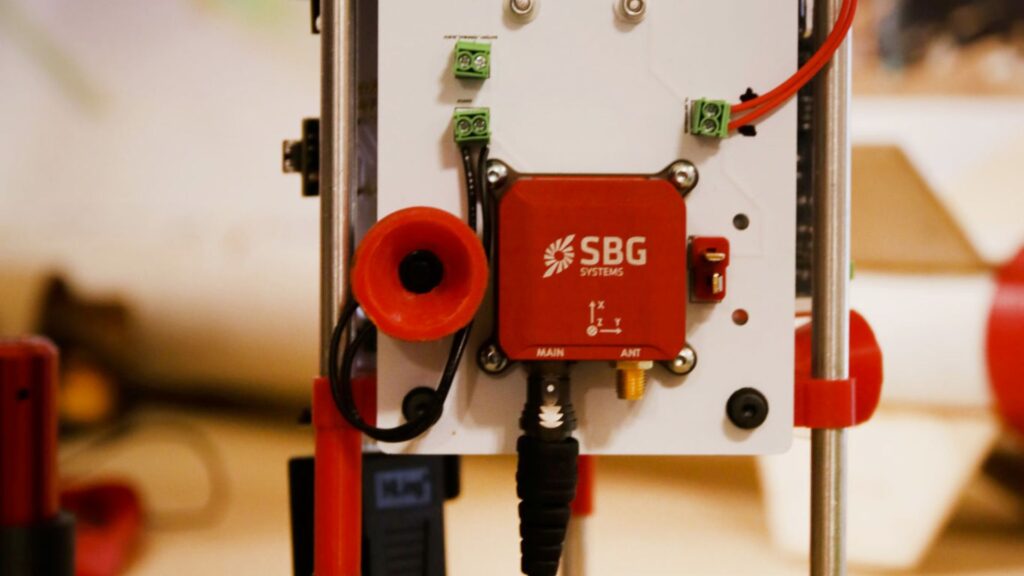
uORocketry zintegrowało system nawigacji inercyjnej Ellipse-N firmy SBG Systems ze swoim rozwiązaniem awionicznym z 2019 roku w celu osiągnięcia zoptymalizowanego algorytmu sterowania dla hamulców aerodynamicznych.
Zespół zintegrował to rozwiązanie czujnika INS GNSS z płytą zasilającą sprzętu, wykorzystując je do estymacji stanu w celu określenia idealnego wysunięcia hamulców aerodynamicznych.
Schemat hamowania powietrznego integrujący INS
Czujniki Ellipse-N INS GNSS zawierają jednostkę pomiaru inercyjnego składającą się z akcelerometrów, żyroskopów i magnetometrów, połączoną z GPS i barometrem.
Nasze rozwiązanie zapewnia niezawodną orientację, wysokość i dane nawigacyjne w najtrudniejszych warunkach dzięki wysokiej jakości komponentom klasy przemysłowej, kalibrowanym dynamicznie i temperaturowo (od -40°C do 85°C).
Zostało ono użyte do jak najlepszego kontrolowania lotu i osiągnięcia wymaganej wysokości, a także do optymalnego rozmieszczenia systemu odzyskiwania. Pomogło w znalezieniu właściwej konfiguracji rakiety i idealnej pozycji do rozmieszczenia spadochronów w celu lądowania i odzyskania.
uORocketry uczestniczyło w SA Cup w 2018 i 2019 roku. Dzięki swojej rakiecie o nazwie Jackalope, w tym roku znaleźli się w pierwszej 10, zajmując 8 miejsce na 122!
Zajęli również 4 miejsce na 47 drużyn rywalizujących w swojej kategorii: wysokość 10 000 stóp, silnik komercyjny. Oprócz samego konkurowania, wygłosili nawet prezentację na temat swojego schematu hamowania aerodynamicznego, używanego do precyzyjnego ustalenia wysokości końcowej podczas lotów.
O uORocketry
uOttawa Rocketry to multidyscyplinarny, uniwersytecki zespół inżynierski studentów założony w 2016 roku.
Od tego czasu opracowali liczne projekty z zakresu inżynierii lotniczej i kosmicznej, takie jak hybrydowy silnik rakietowy, koncepcja spadochronu, niestandardowe systemy awioniki, a nawet unikalne mechanizmy zapłonowe.
Ich głównym celem jest jednak budowa rakiet.


Ellipse-N
Ellipse-N to kompaktowy i wydajny system nawigacji inercyjnej RTK (INS) z wbudowanym dwupasmowym odbiornikiem GNSS obsługującym cztery konstelacje. Dostarcza dane o przechyłach (roll, pitch), kurs (heading) i kołysaniu (heave), a także centymetrową pozycję GNSS.
Sensor Ellipse-N najlepiej sprawdza się w dynamicznych środowiskach i trudnych warunkach GNSS. Ponadto, może również pracować w aplikacjach o niższej dynamice, wykorzystując heading magnetyczny.

Zapytaj o wycenę dla Ellipse-N
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
