Ekinox Micro und Quanta Micro stehen an der Spitze der urbanen Navigation, und wir haben sie einem Automotive-Test unterzogen.
Es handelt sich um zwei Trägheitsnavigationssysteme, die taktische MEMS-basierte IMU und vollwertige RTK-GNSS-Empfänger kombinieren, um eine unvergleichliche Leistung in einer erstaunlich kompakten Form zu bieten.
Sie sind speziell auf Anwendungen mit strengen SWaP-Beschränkungen zugeschnitten, wie z. B. unbemannte Boden-/Luft-/Seefahrzeuge, Innenraumkartierung und sogar UAV-Vermessung.
Dieser umfassende Artikel zur Leistungsbewertung basiert auf einem ausführlichen Test, der im Juli 2022 durchgeführt wurde, um die Fähigkeiten des Quanta Microin Erwartung seiner kommerziellen Einführung zu validieren. In diesem Bericht wird die dynamische Leistung des Systems demonstriert.
Die Sensoren wurden ausgiebig in verschiedenen GNSS-Umgebungen getestet, darunter unter freiem Himmel, in mittelgroßen Stadtgebieten und in Häuserschluchten. Die Ergebnisse zeigten durchweg eine außergewöhnliche Datenqualität. Sowohl Quanta Micro als auch Ekinox Micro übertrafen ihre spezifizierte Leistung, selbst in schwierigen Szenarien.
Während die Spezifikationen normalerweise auf dem Industriestandardszenario wie normalen Landbedingungen nach einer Aufwärmphase basieren, umfasste der Test schwierige städtische Bedingungen ohne Aufwärmphase.
Bemerkenswerterweise haben Ekinox Micro und Quanta Micro in diesem Test überragend abgeschnitten und unter allen Bedingungen eine hervorragende Leistung gezeigt.
Voraussetzung
Die Lektüre dieses Testberichts setzt ein gewisses Maß an Wissen über die Konzepte der Trägheitsnavigation und der Nachbearbeitung voraus. Unsere Wissensbasis wird Ihnen helfen, Ihre Reise in die wunderbare Welt der Trägheitsnavigation zu beginnen.
Akronyme
- CORS: Kontinuierlich arbeitende Referenzstationen
- DUT: Zu prüfendes Gerät
- EUT: Zu prüfende Ausrüstung
- FOG: Faseroptisches Gyroskop
- GNSS: Globale Satellitennavigationssysteme (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (offizielles französisches geographisches Amt)
- IMU: Trägheitsmessgerät
- INS: Inertiales Navigationssystem
- LiDAR: Light Detection And Ranging
- MEMS: Mikro-Elektro-Mechanisches System
- Zusammengeführt: Vorwärts- und Rückwärtsnachbearbeitung mit Qinertia
- PPK: Nachbearbeitete Kinematik
- RGP: Réseau GNSS Permanent (französisches nationales CORS-Netz)
- RMS: Root Mean Square
- RTK: Real-Time Kinematic
- Std: Standardabweichung
- SWaP-C: Größe Gewicht und Leistung - Kosten
- TC: Feste Kopplung
- UAV: Unbemanntes Luftfahrzeug
Testauftragsziele und Spezifikationen
Planung und Durchführung von Missionen
Der Test wurde an Bord des Testfahrzeugs SBG Systems am 7. Juli 2022 durchgeführt. Es handelte sich um eine 115-minütige Fahrt bei klarem Wetter in der Nähe der Einrichtungen von SBG Systems, darunter:
- 45 Minuten zusammenhängender Betrieb unter freiem Himmel.
- 35 Minuten zusammenhängender Betrieb in einer halbwegs dichten städtischen Umgebung.
- 35 Minuten ununterbrochener Betrieb unter rauen städtischen Bedingungen, einschließlich Tunneln.

In Anbetracht der Komplexität der Umgebung wurde bei der Missionsplanung nicht besonders darauf geachtet, eine günstige Tageszeit im Hinblick auf die Sichtbarkeit der Satelliten zu wählen.
Ziele der Mission
Diese Mission wurde speziell entwickelt, um zu zeigen, wie sich das Quanta Micro und das Ekinox Micro INS in einem realen Szenario verhalten. So konnten wir überprüfen, ob die INS ihre Spezifikationen erfüllen (und übertreffen), aber auch ihre herausragende Leistung selbst unter schwierigsten GNSS-Bedingungen demonstrieren.
Während der Mission sammelten wir Daten zur Messung der Echtzeitleistung des Quanta Micro; anschließend führten wir eine Nachbearbeitung derselben Datensätze durch (PPK).
Dies ermöglicht es uns, einen vollständigen Überblick über die Leistung des Quanta Micro INS in einer automobilen Umgebung und in geringerem Maße auch in anderen Anwendungen (die Gegenstand spezifischer Testberichte sind) zu geben.
Der Vorteil der Verwendung optimierter Bewegungsprofile wird durch den Vergleich der Verarbeitung in automobilen und flugzeugspezifischen Bewegungsprofilen demonstriert.
Einrichtung von Kfz-Tests
Geprüfte Ausrüstung
| Name | Beschreibung | HW-Revision | Seriennummer | Firmware-Version |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Bewertet durch Bevollmächtigte | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Bei allen Tests waren die Einbauparameter (Verlagerungen, Hebelarm usw.) entweder aus CAD-Zeichnungen oder aus früheren Kalibrierungen a priori bekannt.
Obwohl es sich bei beiden Prüflingen um das Quanta Micro handelt, gilt der Inhalt dieses Testberichts in vollem Umfang auch für das Ekinox Micro: Es ist eine robuste Version des Quanta Micro und verhält sich genau so. Eine Reihe akribischer interner Vergleiche hat diese Behauptung bestätigt.
Referenz-Trajektorie
Die zur Bewertung der Leistungsfehler verwendete Referenzquelle ist eine mit Qinertia verarbeitete, eng gekoppelte Flugbahn mit Daten, die von der Horizon IMU SBG Systems (FOG-basierte ultimative Leistung), Navsight-S und dem Pegasem-Kilometerzähler stammen, die zusammen mit dem EUT an Bord des Fahrzeugs installiert sind. Die für das Post-Processing verwendete Qinertia-Version war 3.2.881-stable.
| Name | Beschreibung | Genauigkeit der Position | lage | richtung |
|---|---|---|---|---|
| Navsight-Horizont | FOG-basierte INS | 0,01m (0,01m @ 10s) (0,05m @ 60s) | 0,004° (0,004° @ 10s) (0,005° @ 60s) | 0,008° (0,008° @ 10s) (0,010° @ 60s) |
Die beiden VSP6037L GNSS-Antennen, die das Navsight-S speisen, werden gemeinsam mit dem EUT genutzt (siehe Diagramm des Testaufbaus).
Die Qualitätsindikatoren (Positions- und lage ) der nachbearbeiteten Horizon-Trajektorie aus der nachträglichen Datenanalyse ermöglichen es, diese als Referenz in Bezug auf das EUT zu verwenden.
Jede der drei an Bord installierten INS wurde auf einen gemeinsamen Punkt übertragen, um einen direkten Vergleich zu ermöglichen.
Basisstation
Alle PPK- und RTK-Operationen wurden mit einer einzigen Basis durchgeführt, der SBG'S-Station, die auf dem Dach der SBG Systems installiert und in das französische CORS-Netz IGN RGP eingebunden ist.
SBGS ermöglicht die Verfolgung aller GNSS-Konstellationen (GPS + GLONASS + GALILEO + BEIDOU). Alle vier Konstellationen wurden für den Echtzeit-RTK-Betrieb verwendet.
Testfahrzeug
Bei dem Testfahrzeug handelte es sich um einen speziellen Lieferwagen SBG Systems , der mit unserer Standardausrüstung ausgestattet war, wie in der folgenden Abbildung dargestellt.

Die Basislinie zwischen den beiden GNSS-Antennen beträgt etwa 2 m, und die meisten Installationsparameter sind mit besonders guter Genauigkeit bekannt.
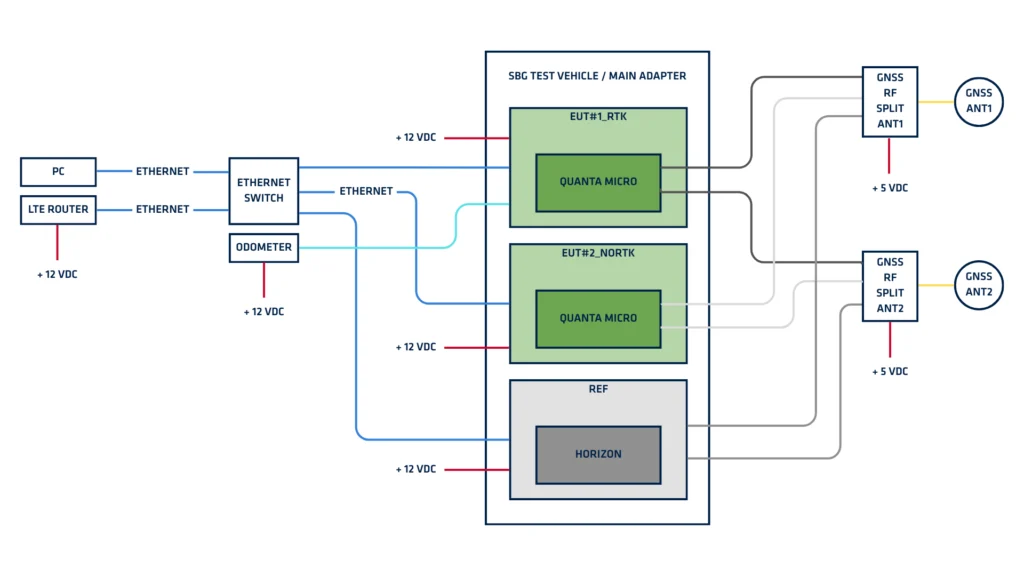
EUT-Konfiguration
Die zu prüfenden Geräte (EUT) wurden für Echtzeitmessungen wie folgt konfiguriert:
- EUT1: GNSS mit allen 4 Konstellationen, RTK und Odometerhilfe.
- EUT2: GNSS mit allen 4 Konstellationen, kein RTK, kein Odometer Aiding.
Ergebnisse der Kfz-Tests
Automotive-Tests beinhalten eine Aufwärmphase, und alle Statistiken wurden unter Einbeziehung dieser Aufwärmphase berechnet.
Diese Wahl wirkt sich in den meisten Fällen negativ auf die meisten Zahlen aus, insbesondere bei den richtung , die in den ersten 5-10 Minuten der Mission sehr schnell abnehmen und bei denen hohe Werte einen signifikanten Einfluss auf std und RMS haben.
Darüber hinaus haben wir die Statistiken für "kein RTK", "RTK" und "PPK" mit zwei Antennen berechnet, die die Automotive-Profile am besten repräsentieren, indem wir absichtlich alle drei Missionsteile einbezogen haben: offene, mittlere und raue GNSS-Umgebungen. Diese Wahl hat auch einen negativen Einfluss auf die meisten Zahlen.
Diese beiden Entscheidungen lassen die Werte pessimistisch erscheinen. Sie zeigen jedoch, dass Quanta Micro mit einer besonders guten Leistung direkt nach der Ausrichtungsphase (auch wenn keine Aufwärmphase möglich ist) nutzbar ist und beweisen die Robustheit der Quanta Micro , die in der Lage sind, die Leistungsspezifikationen des Produkts auch in einer viel schwierigeren als der spezifizierten Testumgebung nahezu zu erfüllen.
Szenarien in Echtzeit
Diese INS sind in der Lage, in Echtzeit zu arbeiten und bieten eine Hochfrequenz-Navigationslösung mit geringer Latenzzeit mit oder ohne RTK-Korrekturen. Die folgenden Tabellen und Abbildungen enthalten detaillierte Echtzeit-Ergebnisse für beide EUT unter den folgenden Bedingungen.
- Bewegungsprofil für Fahrzeuge
- Wegstreckenunterstützung für EUT #1 (RTK), keine Wegstreckenunterstützung für EUT #2 (No RTK)
- mit richtung mit zwei Antennen
| EUT#1 (RTK + odo) | EUT#2 (kein RTK, kein odo) | |||
|---|---|---|---|---|
| Fehler | 68% | 95% | 68% | 95% |
| 2D-Stellung | 0.021m | 0.246m | 1.155m | 2.734m |
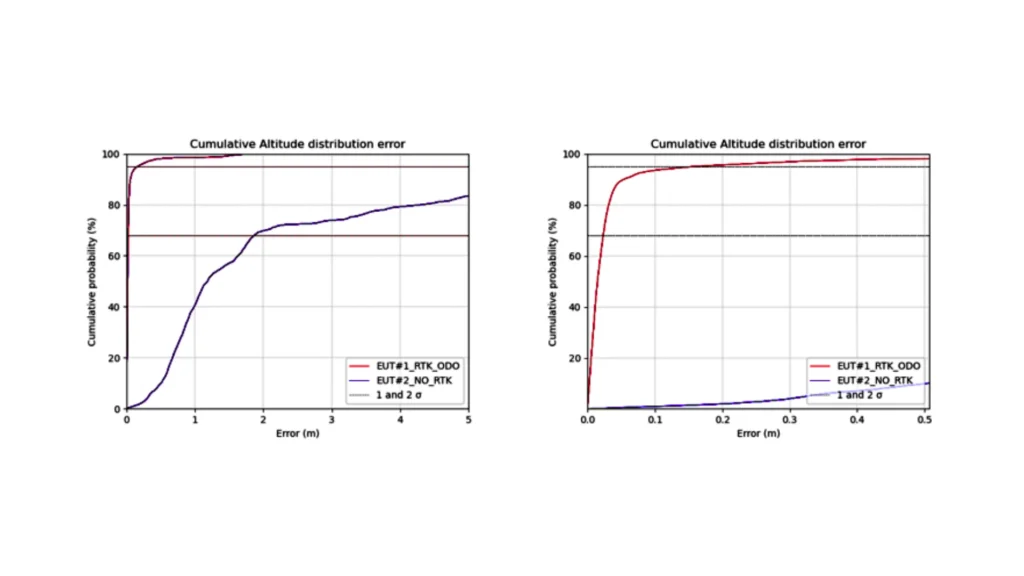
| Vertikale Position | 0.023m | 0.157m | 1.865m | 7.329m |
| rollen / nicken | 0.011° | 0.026° | 0.015° | 0.035° |
| Yaw | 0.060° | 0.140° | 0.078° | 0.190° |
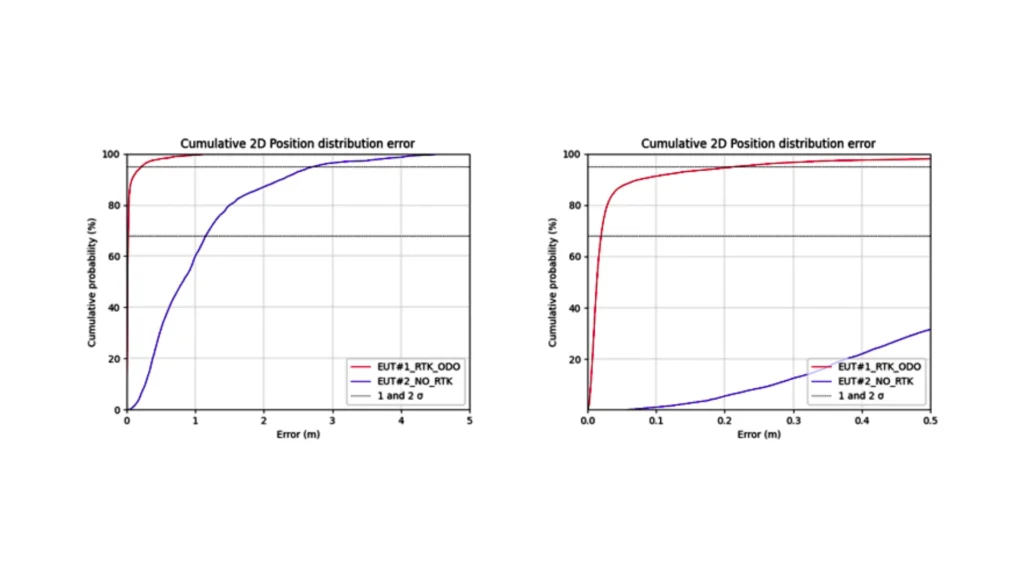
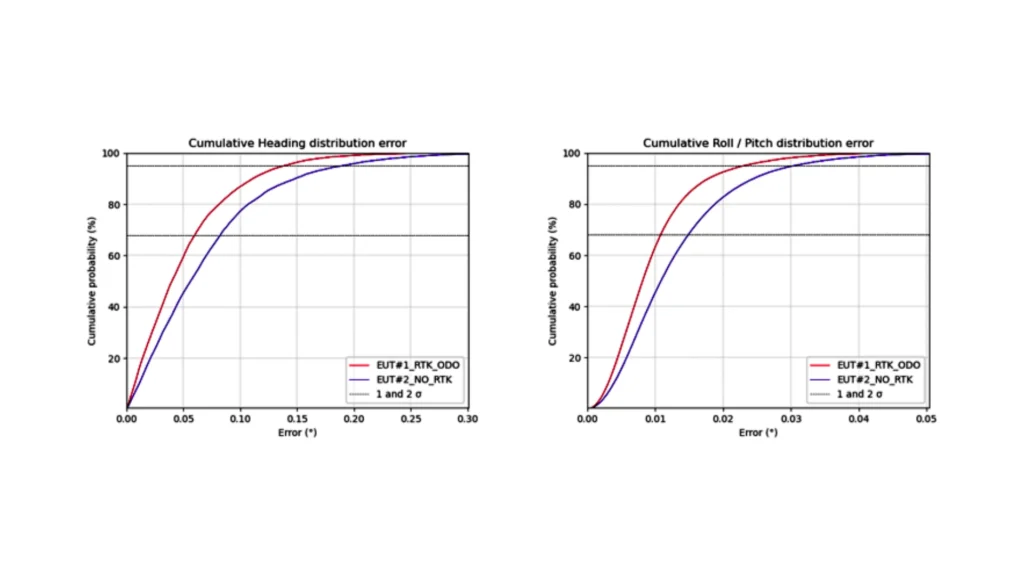
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Nachbearbeitete Szenarien
Diese Szenarien bewerten die ultimative Leistung des Produkts, die mit der Qinertia-Nachbearbeitungssoftware im TC-Mischmodus (vorwärts und rückwärts) erreicht werden kann, und vergleichen den Einfluss des Bewegungsprofils. Die Ergebnisse, die für ein einzelnes EUT (EUT #2) angezeigt werden, waren für beide Geräte nahezu identisch.
| TC Automotive Profil (Doppelantenne + Kilometerzähler) | TC Flugzeugprofil (Einzelantenne) | |||
|---|---|---|---|---|
| Fehler | 68% | 95% | 68% | 95% |
| 2D-Stellung | 0.014m | 0.093m | 0.014m | 0.100m |
| Vertikale Position | 0.008m | 0.032m | 0.008m | 0.034m |
| rollen / nicken | 0.011° | 0.032° | 0.011° | 0.032° |
| Yaw | 0.051° | 0.211° | 0.041° | 0.208° |
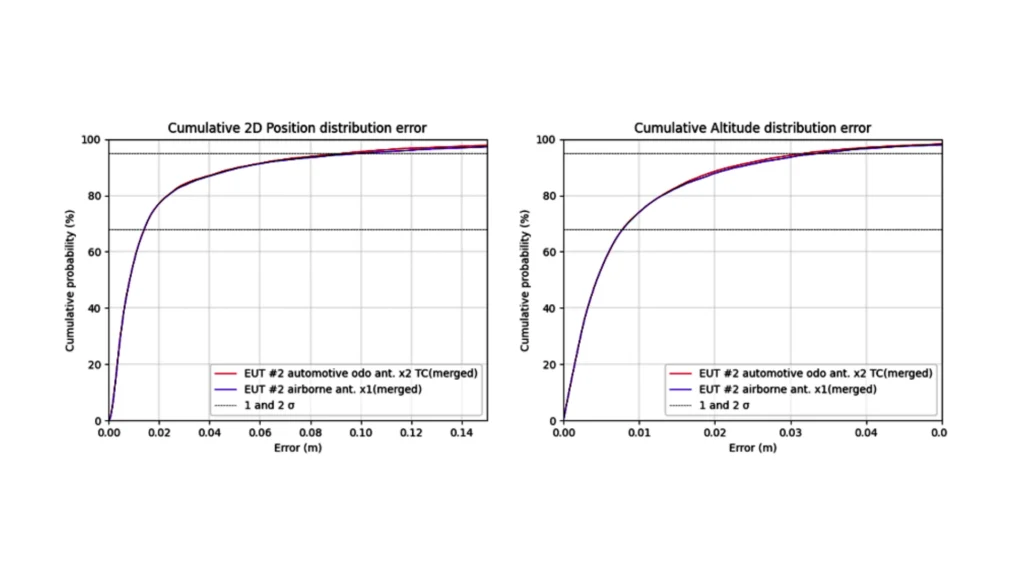
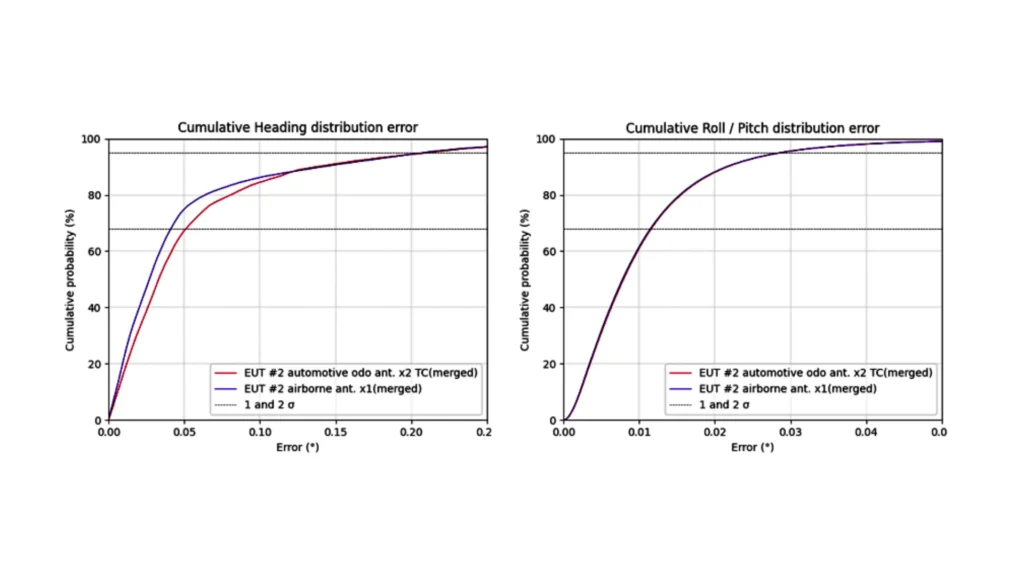
Die vorstehende Tabelle und die Diagramme zeigen, dass das Bewegungsprofil nur einen geringen Einfluss auf die Nachbearbeitungsleistung hat.
Auch wenn die GNSS-Umgebung sehr schwierig war, verhält sich das Produkt sehr gut und liefert sehr genaue Ergebnisse. Was die Echtzeit betrifft, so führt die Beschränkung der Mission auf einen offenen Himmel und eine mittlere städtische Umgebung zu Ergebnissen, die besser sind als die Produktspezifikationen.
Schlussfolgerung
Der Test und die anschließende Datenanalyse von Ekinox Micro und Quanta Micro unterstreichen deren starke Fähigkeiten, Zuverlässigkeit und Genauigkeit. Diese Systeme zeigen sowohl im Einzel- als auch im Doppelantennenmodus (RTK-GNSS-Empfänger) eine außergewöhnlich gute Leistung, selbst in schwierigen Umgebungen.
EkinoxEkinox Micro und Quanta Micro sind eine ausgezeichnete Wahl für Echtzeitanwendungen, die eine konstante und genaue Positionierung und lage erfordern. Sie arbeiten selbst in anspruchsvollen städtischen Umgebungen effektiv und stellen ihre Robustheit unter Beweis.
Darüber hinaus bietet die Qinertia-Software von SBG Systemsin Szenarien, in denen die Echtzeitleistung nicht ausschlaggebend ist (z. B. LiDAR-Vermessung und Photogrammetrie), ein außergewöhnliches Post-Processing, das die Leistung selbst in schwierigen GNSS-Umgebungen auf Zentimetergenauigkeit erhöht. Dies macht die Kombination aus INS und Qinertia zur perfekten Wahl für direkte Georeferenzierung und SLAM-Techniken.
Diese Studie bestätigt eindeutig, dass Quanta Micro und Ekinox Micro für verschiedene Anwendungen geeignet sind, einschließlich solcher mit strengen Anforderungen an Größe, Gewicht und Leistung.
- Quanta Micro ist als OEM-Lösung konzipiert und lässt sich nahtlos in UAV-Vermessungs- und volumetrische Navigationsanwendungen integrieren.
- Mit seinem benutzerfreundlichen Design und seiner Robustheit (qualifiziert nach MIL-STD-461 und MIL-STD-1275), Ekinox Micro für leichte Vermessungsanwendungen geeignet, entfaltet aber seine Stärken am besten bei Navigationsanwendungen, bei denen es auf Robustheit ankommt.
Für Vermessungsaufgaben, die flexiblere SWaP-C-Parameter und höhere Präzision über ein breites Spektrum von Bedingungen erfordern, bietet SBG Systems die Produkte Quanta Plus, Quanta Extra, Ekinox, Apogee und Navsight an. Diese Alternativen, die auch vollständig mit den Nachbearbeitungsfunktionen von Qinertia kompatibel sind, bieten ein höheres Leistungsniveau und sind eine hervorragende Option für Anwendungen, die ein Höchstmaß an Leistung erfordern.
Laden Sie den PDF-Bericht herunter