
In diesem ersten Artikel unserer "Mastering Accuracy"-Serie werden wir uns mit den globalen Navigationssatellitensystemen (GNSS) und ihren eigenständigen Genauigkeiten befassen und dabei die GNSS und ihre Fehlerquellen berücksichtigen
Was ist ein GNSS-System?
Satellitengestützte Ortungssysteme wie GPS sind mittlerweile allgegenwärtig und begleiten uns auf unseren Autofahrten und Wanderungen. Sie spielen auch eine entscheidende Rolle bei so unterschiedlichen Anwendungen wie autonomen Fahrzeugen, Landwirtschaft und Vermessung.
Es ist jedoch wichtig, den Begriff "GPS" durch den umfassenderen Begriff "GNSS" (Global Navigation Satellite System) zu ersetzen, der alle Satellitenkonstellationen über GPS hinaus umfasst.
Es sind vier globale Satellitenkonstellationen in Betrieb (GPS, GLONASS, GALILEO, BEIDOU). Darüber hinaus gibt es zusätzliche Konstellationen, die lokale Regionen bedienen, wie das indische IRNSS, oder die globalen Konstellationen ergänzen, wie das japanische QZSS.
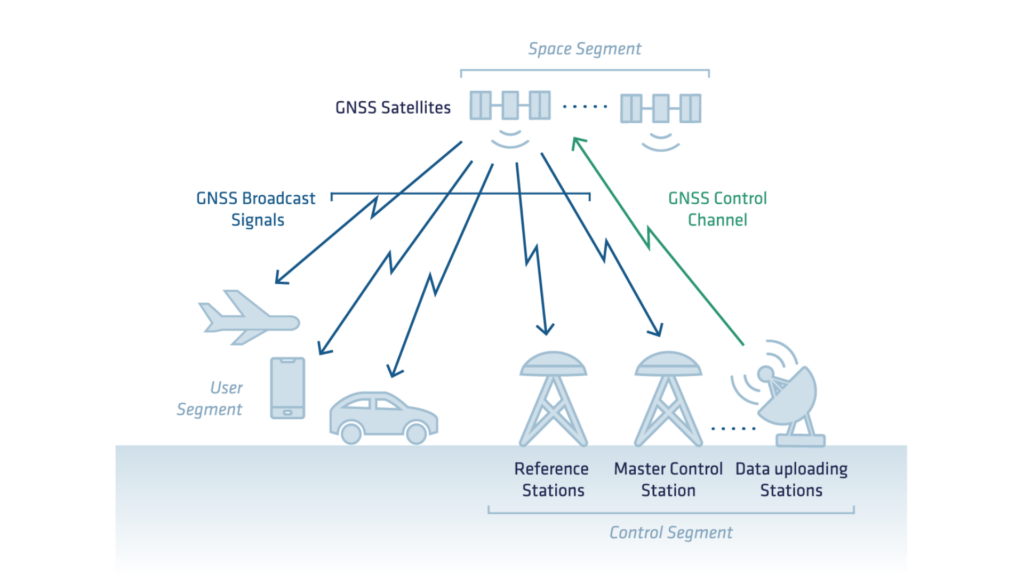
Neben den Satelliten besteht ein GNSS-System aus weiteren wichtigen Segmenten:
- Das Satellitensegment, das die Satellitenkonstellation umfasst.
- Das Kontrollsegment, bestehend aus Bodenkontrollstationen und Ausrüstung. Diese sind für die Überwachung der Konstellationen, die Bestimmung der Position der Satelliten und die Sicherstellung ihres kontinuierlichen und korrekten Betriebs verantwortlich.
- Das Nutzersegment, das Geräte zur Berechnung der Position auf der Grundlage der von den Satelliten empfangenen Signale umfasst.
GNSS-Grundprinzip: Trilateration
GNSS bestimmt die Position und die Zeit eines Empfängers durch Trilateration, wobei Signale von mehreren Satelliten verwendet werden.
Um eine Position zu berechnen, muss das System vier Variablen lösen: Breitengrad, Längengrad, Höhe und Zeit. Für diesen Prozess sind mindestens vier Satelliten erforderlich, wobei zusätzliche Satelliten die Genauigkeit und Zuverlässigkeit verbessern.
Die folgende Abbildung zeigt, wie die Trilateration funktioniert. Jeder Satellit definiert eine Kugel um sich selbst, die die möglichen Entfernungen zum Empfänger darstellt.
Ein zweiter Satellit grenzt die möglichen Lösungen auf den Schnittpunkt dieser beiden Kugeln ein. Ein dritter Satellit verfeinert die Lösung weiter, so dass das System einen einzigen Standort bestimmen kann. In realen Anwendungen muss das System auch die Zeit berücksichtigen, was einen vierten Satelliten erforderlich macht.
Von den Satelliten ausgestrahltes Signal
Die GNSS-Satelliten senden Signale über verschiedene Frequenzbänder wie L1, L2, L5 und andere. Es gibt drei grundlegende Komponenten von GNSS-Signalen:
- Navigationsdaten (Niederfrequenz): Diese vom Kontrollsegment berechneten Daten enthalten wichtige Informationen wie Ephemeriden (Keplersche Bahnparameter, die für die Berechnung der Satellitenpositionen erforderlich sind), Uhrenkorrekturdaten und zusätzliche Informationen. Sie werden auf den Satelliten hochgeladen und weltweit an GNSS-Empfänger übertragen.
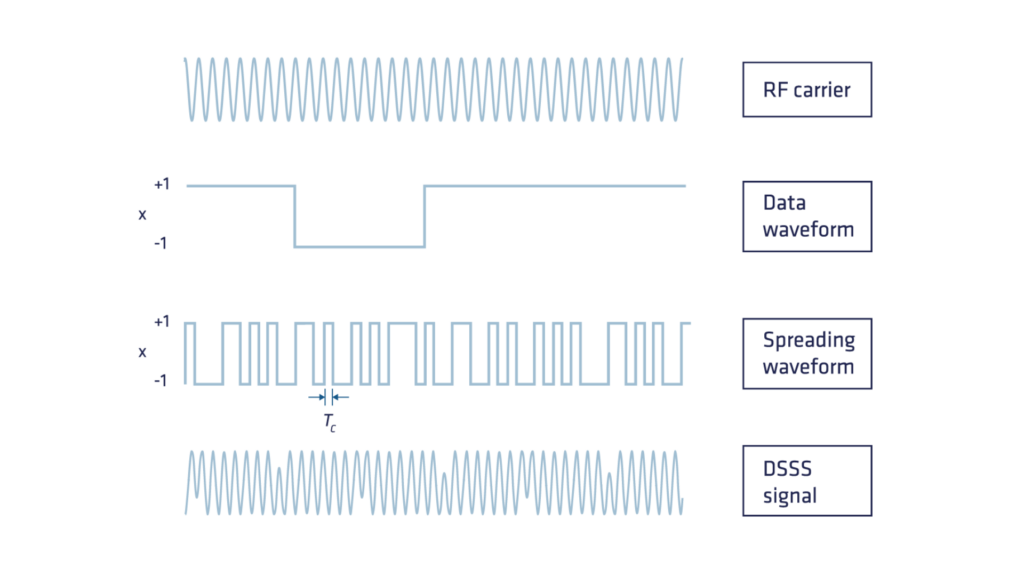
- Pseudozufälliger Rauschcode oder PRN-Code: Jeder Satellit sendet einen einzigartigen pseudozufälligen Rauschcode (PRN-Code), eine deterministische Hochfrequenzfolge von 0en und 1en, die ein vorhersehbares Muster aufweist, so dass der Empfänger sie reproduzieren kann. Der Hauptvorteil der Hinzufügung des PRN-Codes besteht darin, dass er es mehreren Satelliten ermöglicht, gleichzeitig Signale auf derselben Frequenz zu senden, die vom Empfänger erkannt werden können. Bei dieser Technik, die als Code Division Multiple Access (CDMA) bezeichnet wird, wird jedem Satelliten ein eindeutiger Pseudozufallscode zugewiesen. Nur Glonass verwendet FDMA (Frequency Division Multiple Access), bei dem jeder Satellit eine leicht unterschiedliche Frequenz hat.
- HF-Trägerwelle: ein sinusförmiges Signal, das ursprünglich für die Übertragung des kombinierten Signals aus Navigationsdaten und PRN-Code entwickelt wurde. Wir werden später sehen, wie sich diese Komponente zur Grundlage des GNSS-Signals entwickelt und eine Positionsgenauigkeit im Zentimeterbereich ermöglicht.
Messung der Entfernung zum Satelliten: Code und Trägerphase
Ursprünglich war das GPS-System so konzipiert, dass der Empfänger eine PRN-Code-Replik und Autokorrelationstechniken verwendet, um die Entfernung zwischen Satellit und Empfänger mit einer Genauigkeit im Submeterbereich zu berechnen. Die Trägerwelle, die ursprünglich für die PRN-Code-Übertragung vorgesehen war, erwies sich jedoch als wertvoller Vorteil.
Die Trägerphasenmessung ist zwar präziser, führt aber zu Mehrdeutigkeiten bei der Bestimmung der Entfernung zwischen Satellit und Empfänger. Im Folgenden werden beide Messungen näher untersucht.
Satelliten-Empfänger-Entfernungsberechnung mit PRN-Code
Der GNSS-Empfänger verwendet ein Verfahren namens "Delay Lock Loop", um die Zeitverzögerung zwischen dem gesendeten und dem empfangenen Code zu bestimmen. Diese Zeitverzögerung, die der Signallaufzeit entspricht, wird dann in eine Entfernung umgewandelt, indem sie mit der Lichtgeschwindigkeit multipliziert wird.
Aufgrund der nicht synchronisierten Uhren von Empfänger und Satellit wird die resultierende Entfernung jedoch als Pseudoentfernung bezeichnet. Neben dem Uhrensynchronisationsfehler wird die Pseudoentfernung durch verschiedene andere Fehler beeinflusst, die mit der Ausbreitungsumgebung (Atmosphäre, Hardware usw.) zusammenhängen und später in diesem Artikel erörtert werden.
Verbesserung der Reichweite von Satelliten zu Empfängern: Messung der Trägerphase
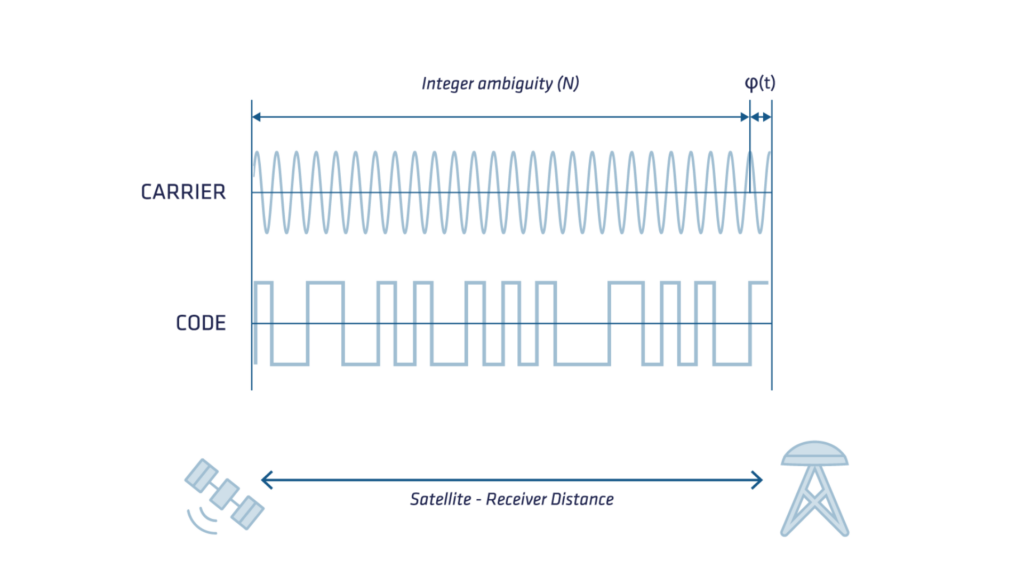
Die Entfernung zwischen Satellit und Empfänger kann auch durch Zählen der Anzahl der Phasenzyklen bestimmt werden, die zwischen der Aussendung und dem Empfang des Signals verstrichen sind, und diese mit der Trägerwellenlänge multipliziert werden.
Diese Messung ist um zwei Größenordnungen genauer als der Code, aber eine konstante, unbekannte, ganzzahlige Anzahl von Zyklen (auch als Mehrdeutigkeit bekannt) beeinträchtigt ihre absolute Genauigkeit. Um die genaue Entwicklung der Trägerphase zu bestimmen, akkumuliert der GNSS-Empfänger die Doppler-Frequenzverschiebungen in der Trägerwelle, die durch die Relativbewegung zwischen Satellit und Empfänger verursacht werden.
Im Falle einer Signalstörung kann dieser Akkumulationsprozess die tatsächliche Bewegung nicht berücksichtigen, und es können abrupte Sprünge in der Messung beobachtet werden, die auch als "Cycle Slips" bezeichnet werden.
Die korrekte Handhabung der Zyklusabweichungen und der Mehrdeutigkeit ist eine Herausforderung und ein wichtiger Aspekt präziser Positionierungstechniken wie Real Time Kinematics (RTK) und Precise Point Positioning (PPP).
Das folgende Diagramm zeigt die Signalträgerwelle, den Code und ihre jeweiligen Auflösungen.
Fehlerquellen bei GNSS
Die anfängliche Genauigkeit von GPS für die Allgemeinheit (nicht für das Militär) lag bei etwa 100 m. Nach mehreren Jahren der Weiterentwicklung (Abschaffung der selektiven Verfügbarkeit, Einführung neuer Konstellationen und SBAS-Systeme, neuer Satelliten und neuer Frequenzen) liegt die Genauigkeit von GNSS-Empfängern der Einstiegsklasse heute zwischen 5 m und 1 m bei High-End-Empfängern.
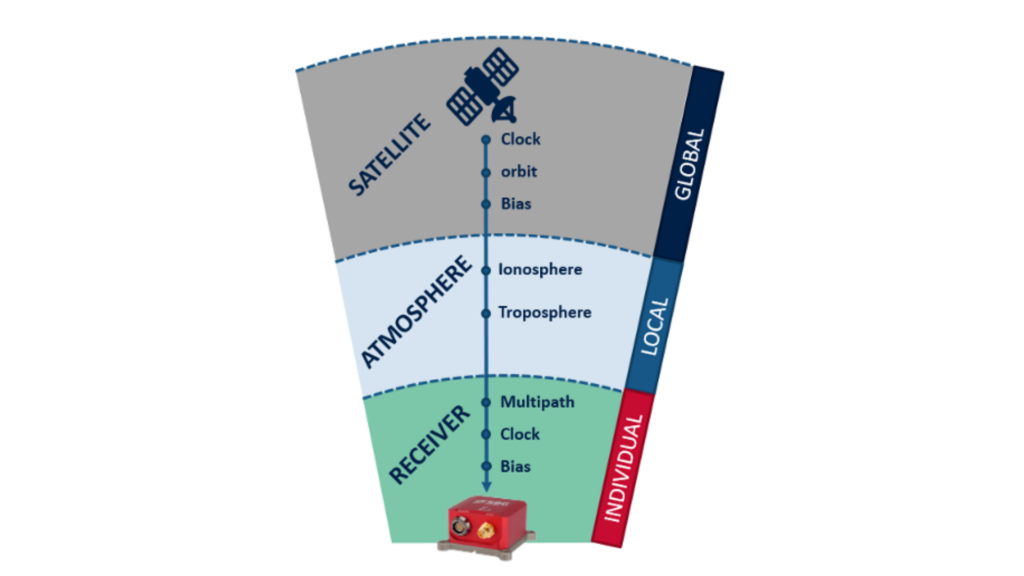
Satellitenfehler
- Uhrfehler: Die Atomuhren der GNSS-Satelliten sind zwar hochpräzise, unterliegen aber einer geringen Drift. Leider kann schon eine geringe Abweichung der Satellitenuhr zu einer erheblichen Diskrepanz bei der vom Empfänger berechneten Position führen. Ein Uhrfehler von nur 10 Nanosekunden bedeutet zum Beispiel einen Positionsfehler von 3 Metern bei der Entfernungsmessung!
- Fehler in der Umlaufbahn: GNSS-Satelliten folgen zwar hochpräzisen und gut dokumentierten Bahnen, doch unterliegen diese Bahnen, ähnlich wie die Satellitenuhren, geringfügigen Schwankungen. Wie bei den Ungenauigkeiten der Uhren kann auch eine geringfügige Änderung der Satellitenbahn einen erheblichen Fehler in der berechneten Position verursachen. Restfehler in der Umlaufbahn bleiben bestehen und tragen zu möglichen Positionsfehlern von bis zu ±2,5 Metern bei.
Atmosphärische Fehler
- Ionosphärische Verzögerung: Die Ionosphäre, die sich zwischen 50 und 1.000 km über der Erde befindet, enthält geladene Ionen, die die Übertragung von Funksignalen beeinträchtigen und Positionsfehler verursachen (typischerweise ±5 Meter, bei erhöhter Ionosphärenaktivität noch mehr). Die ionosphärische Verzögerung variiert mit der Sonnenaktivität, der Tageszeit, der Jahreszeit und dem Standort, was Vorhersagen schwierig macht.
- Troposphärische Verzögerung: Die unmittelbare atmosphärische Schicht der Erde, die Troposphäre, unterliegt Schwankungen in der Verzögerung aufgrund von Veränderungen der Luftfeuchtigkeit, der Temperatur und des atmosphärischen Drucks.
Fehler des Empfängers
Die interne Uhr des Empfängers, die im Vergleich zur Atomuhr des Satelliten weniger genau ist, sowie andere Hardware- und Softwarefehler führen zu Rauschen und Verzerrungen bei den Messungen.
| Verzögerung | Herkunft | Größenordnung |
|---|---|---|
| Position Fehler | Satellit | 5m |
| Clock Offser | Satellit | 0-300 km |
| Instrumentalverzögerung | Satellit | 1-10 m |
| Relativistischer Effekt | Satellit | 10 m |
| Ionosphärische Verzögerung | Pfad (50-1000 km) | 2-50 m |
| Troposphärische Verzögerung | Pfad (0-12 km) | 2-10 m |
| Insturmentale Verzögerung | Empfänger | 1-10 m |
| Uhr-Offset | Empfänger | 0-300 km |
Um eine optimale Navigation zu gewährleisten, muss das System diese Fehler berücksichtigen, sie mit einem speziellen Fehlermodell abschwächen oder sie durch den Navigationsfilter schätzen.
Bei der Positionsberechnung sollten auch viele andere, in diesem Artikel nicht aufgeführte Fehlerbedingungen berücksichtigt werden, z. B. Gezeiteneffekte und relativistische Effekte.
Verschiedene Fehlerquellen beeinflussen die Leistung der GNSS-Technologie, die eine hochgenaue Positionierung, Navigation und Zeitmessung ermöglicht.
Faktoren wie atmosphärische Verzögerungen, Satellitenuhr- und Ephemeridenfehler, Mehrweginterferenzen und Empfängerrauschen können die Genauigkeit beeinträchtigen. Während moderne Korrekturtechniken (differentielles GNSS, RTK und PPP) dazu beitragen, GNSS und seine Fehlerquellen zu minimieren, ist das Verständnis der Ursachen für die Optimierung der GNSS-Leistung nach wie vor von entscheidender Bedeutung.
Mit den Fortschritten in der Signalverarbeitung, der Sensorfusion und dem maschinellen Lernen werden GNSS-Systeme noch robuster und gewährleisten eine größere Zuverlässigkeit bei verschiedenen Anwendungen.