SeaRobotics USV mit Ekinox-E
SeaRobotics USV integriert das Trägheitsnavigationssystem Ekinox-E zur Fächerstrahlkompensation und Georeferenzierung von Daten.
"Mit dem Ekinox-E können wir die Systemintegration rationalisieren und gleichzeitig unseren Kunden die Möglichkeit bieten, hochauflösende Bathymetrie zu erfassen und zu verarbeiten." | Geoff D., Entwicklungsleiter bei SeaRobotics Corp.

USV 2.5, das kleinste USV von SeaRobotics
Das USV 2.5 ist ein 2,5 Meter langes unbemanntes OberflächenfahrzeugUSV), das ein breites Spektrum an Instrumenten bietet und je nach den Erfordernissen der Mission flexibel mit anderen Messnutzlasten ausgestattet werden kann. Das USV 2.5 wurde an das Center for Marine Science and Technology der North Carolina State University geliefert.
Vollständig ausgestattet für Bathymetrie
Die USV ist integriert:
- ein Edgetech 6205 SwathBathymetric und Simultan-Dual-Frequency Side Scan Sonar System,
- eine Schallgeschwindigkeitssonde,
- das hochflexible Trägheitsnavigationssystem Ekinox-E von SBG Systems in Verbindung mit einem RTK-GPS mit zwei Antennen von Hemisphere,
- und HYPACK-Software.
Angesichts der vielfältigen Fähigkeiten des USV wird es sowohl als erfahrungsbasiertes Lehrmittel als auch für die Durchführung von Grundlagen- und angewandter Forschung in Seen, Flüssen, Flussmündungen und Küstenumgebungen eingesetzt werden.
"Das USV wird für die Kartierung des Meeresbodens und der Wassersäule eingesetzt, die für ein besseres Verständnis verschiedener mariner und aquatischer Prozesse, einschließlich der Dynamik von Ökosystemen, der Wasserqualität und der Stabilität von Küsten, von entscheidender Bedeutung sind", erklärte Del Bohnenstiehl, der leitende Forscher des Projekts.
Das Trägheitsnavigationssystem Ekinox-E von SBG war eine leichte Wahl für das USV 2.5", erklärte Geof Douglass, Entwicklungsleiter bei SeaRobotics.
"Im Vergleich zu Konkurrenzprodukten mit ähnlicher Auflösung ist das Ekinox aufgrund seines kompakten Formfaktors viel einfacher zu integrieren. Bei kleinen unbemannten Oberflächenfahrzeugen (USVs) ist die verfügbare Nutzlast (Gewicht, Stellfläche, Energie, E/A) das wertvollste Gut. Mit dem Ekinox-E können wir die Systemintegration rationalisieren und gleichzeitig unseren Kunden die Möglichkeit bieten, hochauflösende Bathymetrie zu erfassen und zu verarbeiten", fügt Geof hinzu.

Ekinox-E
Ekinox-E akzeptiert zusätzlich Hilfsdaten von externen GNSS-Empfängern zur Navigation.
Das Ekinox-E wurde für den Anschluss von bis zu 4 externen Hilfssystemen, einschließlich DVL oder DMI, entwickelt. Dieses äußerst vielseitige Trägheitsnavigationssystem liefert Orientierungs-, Krängungs- und Navigationsdaten.

Angebot für Ekinox-E anfordern
Haben Sie noch Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie uns gerne direkt kontaktieren!
Was sind Sensoren zur Wellenmessung?
Sensoren zur Wellenmessung sind unverzichtbar, wenn es darum geht, die Dynamik der Ozeane zu verstehen und die Sicherheit und Effizienz im Schiffsbetrieb zu verbessern. Indem sie genaue und zeitnahe Daten über die Wellenbedingungen liefern, helfen sie bei Entscheidungen in verschiedenen Bereichen, von der Schifffahrt und Navigation bis hin zum Umweltschutz. Wellenbojen sind schwimmende Geräte, die mit Sensoren zur Messung von Wellenparametern wie Höhe, Periode und Richtung ausgestattet sind.
Sie verwenden in der Regel Beschleunigungsmesser oder Gyroskope, um Wellenbewegungen zu erfassen, und können Echtzeitdaten zur Analyse an Einrichtungen an Land übertragen.
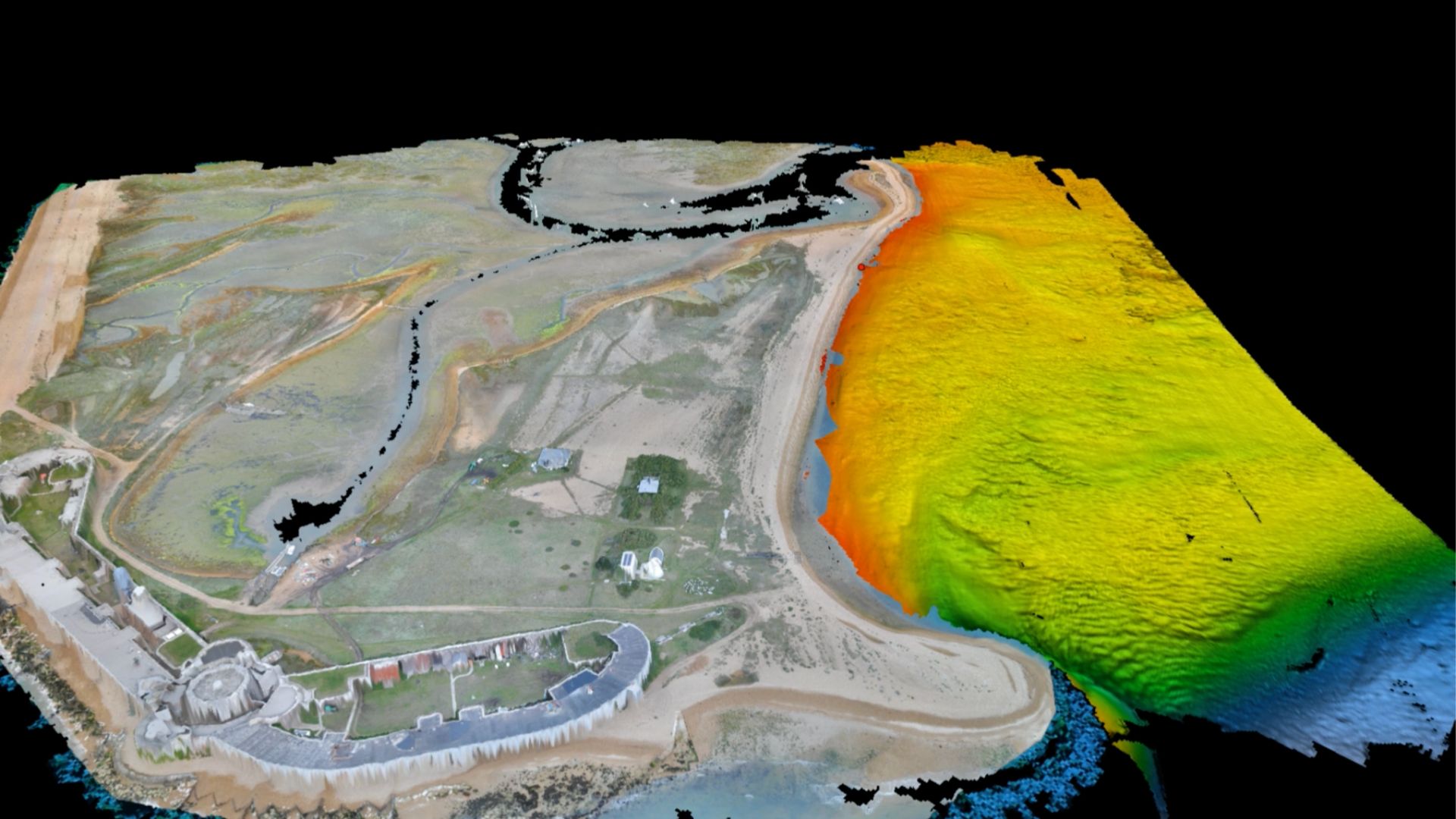
Was ist Bathymetrie?
Die Bathymetrie ist die Untersuchung und Messung der Tiefe und Form von Unterwasserlandschaften, wobei der Schwerpunkt auf der Kartierung des Meeresbodens und anderer Unterwasserlandschaften liegt. Sie ist das Unterwasser-Äquivalent zur Topografie und bietet detaillierte Einblicke in die Unterwassereigenschaften von Ozeanen, Meeren, Seen und Flüssen. Die Bathymetrie spielt eine entscheidende Rolle bei verschiedenen Anwendungen, wie z. B. in der Navigation, beim Meeresbau, bei der Erkundung von Ressourcen und bei Umweltstudien.
Moderne bathymetrische Verfahren stützen sich auf Sonarsysteme wie Einstrahl- und Fächerecholote, die Schallwellen zur Messung der Wassertiefe nutzen. Diese Geräte senden Schallimpulse zum Meeresboden und zeichnen die Zeit auf, die die Echos für ihre Rückkehr benötigen, um die Tiefe auf der Grundlage der Schallgeschwindigkeit im Wasser zu berechnen. Insbesondere mit Fächerecholoten können große Bereiche des Meeresbodens auf einmal kartiert werden, was eine sehr detaillierte und genaue Darstellung des Meeresbodens ermöglicht. Häufig wird eine RTK- und INS eingesetzt, um genau positionierte bathymetrische 3D-Darstellungen des Meeresbodens zu erstellen.
Bathymetrische Daten sind unerlässlich für die Erstellung von Seekarten, die Schiffe sicher führen, indem sie potenzielle Unterwassergefahren wie untergetauchte Felsen, Wracks und Sandbänke identifizieren. Sie spielen auch eine wichtige Rolle in der wissenschaftlichen Forschung, da sie Forschern helfen, geologische Unterwassermerkmale, Meeresströmungen und marine Ökosysteme zu verstehen.
Wozu dient eine Boje?
Eine Boje ist ein schwimmendes Gerät, das in erster Linie in maritimen und wasserbasierten Umgebungen für mehrere wichtige Zwecke verwendet wird. Bojen werden oft an bestimmten Stellen platziert, um sichere Passagen, Kanäle oder gefährliche Bereiche in Gewässern zu markieren. Sie leiten Schiffe und Boote und helfen ihnen, gefährliche Stellen wie Felsen, flache Gewässer oder Wracks zu vermeiden.
Sie werden als Ankerplätze für Schiffe verwendet. Anlegebojen ermöglichen das Anlegen von Schiffen, ohne den Anker werfen zu müssen, was besonders in Gebieten nützlich sein kann, in denen das Ankern unpraktisch oder umweltschädlich ist.
Instrumentierte Bojen sind mit Sensoren ausgestattet, die Umweltbedingungen wie Temperatur, Wellenhöhe, Windgeschwindigkeit und Luftdruck messen. Diese Bojen liefern wertvolle Daten für die Wettervorhersage, die Klimaforschung und ozeanographische Studien.
Einige Bojen dienen als Plattformen für die Erfassung und Übermittlung von Echtzeitdaten aus dem Wasser oder vom Meeresboden und werden häufig in der wissenschaftlichen Forschung, der Umweltüberwachung und für militärische Zwecke eingesetzt.
In der kommerziellen Fischerei markieren Bojen den Standort von Fallen oder Netzen. Sie helfen auch in der Aquakultur, indem sie die Standorte von Unterwasserfarmen markieren.
Bojen können auch ausgewiesene Gebiete markieren, z. B. Zonen, in denen nicht geankert, nicht geangelt oder geschwommen werden darf, und so zur Durchsetzung von Vorschriften auf dem Wasser beitragen.
In allen Fällen sind Bojen von entscheidender Bedeutung für die Gewährleistung der Sicherheit, die Erleichterung von Meeresaktivitäten und die Unterstützung der wissenschaftlichen Forschung.
Was ist Auftrieb?
Der Auftrieb ist die Kraft, die von einer Flüssigkeit (z. B. Wasser oder Luft) ausgeübt wird und die dem Gewicht eines darin eingetauchten Objekts entgegenwirkt. Sie ermöglicht es Objekten, zu schwimmen oder an die Oberfläche zu steigen, wenn ihre Dichte geringer ist als die der Flüssigkeit. Der Auftrieb entsteht durch den unterschiedlichen Druck, der auf die untergetauchten Teile des Objekts ausgeübt wird - in geringerer Tiefe herrscht ein größerer Druck, der eine nach oben gerichtete Kraft erzeugt.
Das Prinzip des Auftriebs wird durch das archimedische Prinzip beschrieben, das besagt, dass die nach oben gerichtete Auftriebskraft auf ein Objekt gleich dem Gewicht der vom Objekt verdrängten Flüssigkeit ist. Ist die Auftriebskraft größer als das Gewicht des Objekts, schwimmt es, ist sie kleiner, sinkt das Objekt. Der Auftrieb ist in vielen Bereichen wichtig, von der Meerestechnik (Konstruktion von Schiffen und U-Booten) bis hin zur Funktionalität von schwimmenden Geräten wie Bojen.
Was ist das Trägheitsführungssystem eines USV?
Ein inertiales Lenksystem für ein unbemanntes OberflächenfahrzeugUSV) ist für eine präzise Navigation und Steuerung von entscheidender Bedeutung, insbesondere wenn GNSS nicht verfügbar ist. Inertialsensoren verfolgen Bewegung und Orientierung und ermöglichen eine effektive Navigation in schwierigen Umgebungen.
TrägheitsnavigationssystemeINS) integrieren IMU mit anderen Systemen, wie GNSS oder Doppler-Geschwindigkeitsaufzeichnungen, um die Genauigkeit zu erhöhen. Außerdem verwenden sie Navigationsalgorithmen wie die Kalman-Filterung, um Position und Geschwindigkeit zu berechnen.
Trägheitssensoren unterstützen den autonomen Betrieb und liefern genaue richtung und Positionsdaten für verschiedene Anwendungen. Sie gewährleisten einen effektiven Betrieb unter Bedingungen, in denen kein GNSS verfügbar ist, und ermöglichen Echtzeitanpassungen für eine verbesserte Manövrierfähigkeit.