我们的惯性导航系统已在德国汉堡港地区为期三天的水文测量中进行了测试。 SBG Systems和MacArtney Germany GmbH为一艘测量船配备了完整的多波束回声测深仪测量配置,并进行了各种测试,以展示SBG惯性系统在不同挑战性环境中的性能。 探索我们的海洋测深测试。
测试条件
最初,原始 INS 数据被实时记录,并与采集软件 Teledyne PDS 中的 RESON SeaBat 7125 的 MBES 数据合并。随后,水文数据经过后处理,并使用 BeamWorx AutoClean 进行过滤。
此外,INS 数据已使用 SBG PPK 软件 Qinertia 进行处理。最后,参考是紧耦合的 Horizon 高端光纤解决方案。
感谢 MacArtney Germany 在本次海洋测深测试中提供的帮助。
海洋水深测试校准程序
基于 SBG Horizon 在海洋水深测量测试期间的运动和轨迹数据进行校准。
该界面包括测量线、计算出的水深、质量指示层和地形特征。
校准报告和结果
SBG Systems的惯性导航系统在德国汉堡为期三天的水文调查中进行了测试。此外,SBG Systems和MacArtney Germany GmbH为一艘调查船配备了完整的多波束回声测深仪配置,以评估INS在具有挑战性的条件下的性能。
测试的传感器包括Horizon、Apogee、Ekinox (Navsight Marine Series) 和 Ellipse。该团队实时记录原始INS数据,并使用Teledyne PDS将其与来自Reson SeaBat 725的MBES数据合并。
随后,他们使用Beam Worx AutoClean对水文数据进行后处理和过滤,而Qinertia处理INS数据。此外,GIS软件生成了3D模型和交互式Web地图,显示了基于INS的测深计算和质量层。JavaScript用于格式化布局。评估涵盖了校准结果、测深数据、轨迹和质量指标,重点是运动和定位性能。
每次海洋测深测试都包括桥下和航道测量,GNSS中断以及强涌浪中的作业。此外,该研究还分析了原始INS日志的松耦合和紧耦合后处理带来的测量改进。
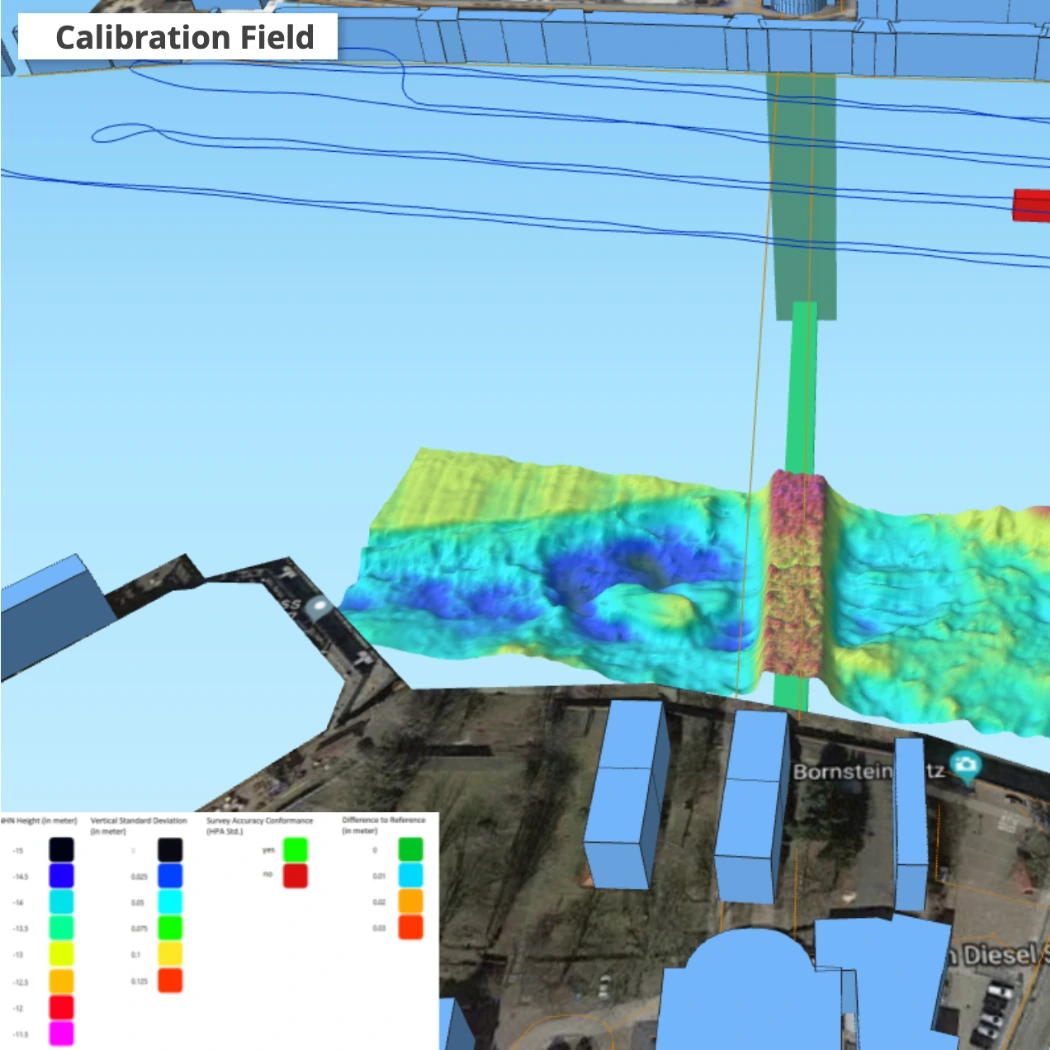
1 – 运动传感器校准场
确保高精度运动传感始于严格的校准。我们的惯性传感器经过广泛的测试,以校正偏差、比例因子和不对中。通过使用先进的多轴平台和受控环境,此过程可提高传感器在各种运行条件下的精度和稳定性。通过微调每个传感器的响应,校准可确保在航空航天、航海和自主导航等要求苛刻的应用中实现可靠的性能。
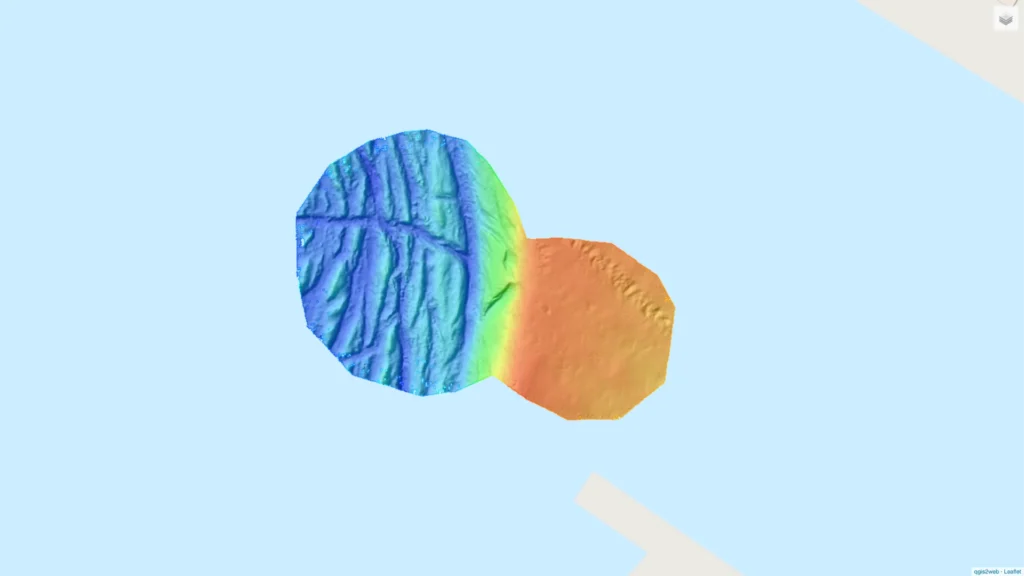
3D模型
基于SBG Horizon的运动和轨迹数据,对运动传感器校准的测量区域进行3D可视化。该界面包括测量线、计算出的测深、质量指示层和地形特征。
3D测量地图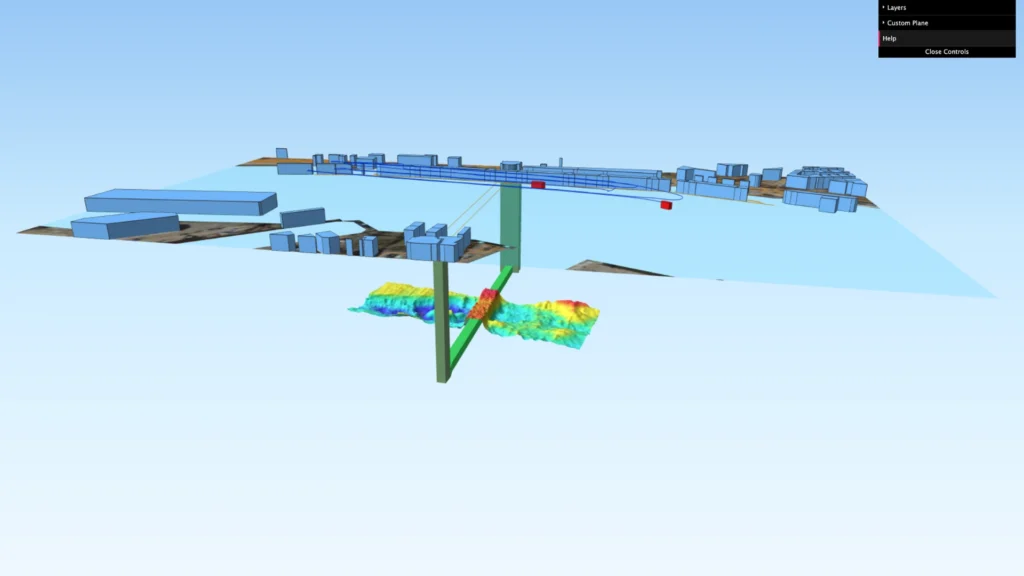
校准报告/偏移
每个 SBG 惯性系统的校准报告和建议的安装角度。Patching 软件 BeamworX Autopatch 生成所有这些报告。在对准测量期间,该团队测量了基于船舶配置和传感器设置的每个传感器的偏移量,然后使用 Cremer Caplan 对其进行了评估。
精确单点定位测试
在Qinertia中对新的PPP处理模式进行测试。水深测量表面和质量层是基于RTK(实时)和PPP(后处理)INS解决方案计算得出的。
2 – 惯性测试
惯性传感器在受控环境中经过严格测试,以确保高精度和可靠性。这些测试评估关键性能指标,如零偏稳定性、比例因子精度、噪声水平和动态响应。通过模拟真实环境条件,包括温度变化和振动曲线,工程师可以验证传感器的耐用性和准确性。最终,通过广泛的惯性测试,制造商可以保证其在国防、航空航天和自主系统等关键任务应用中的最佳性能。
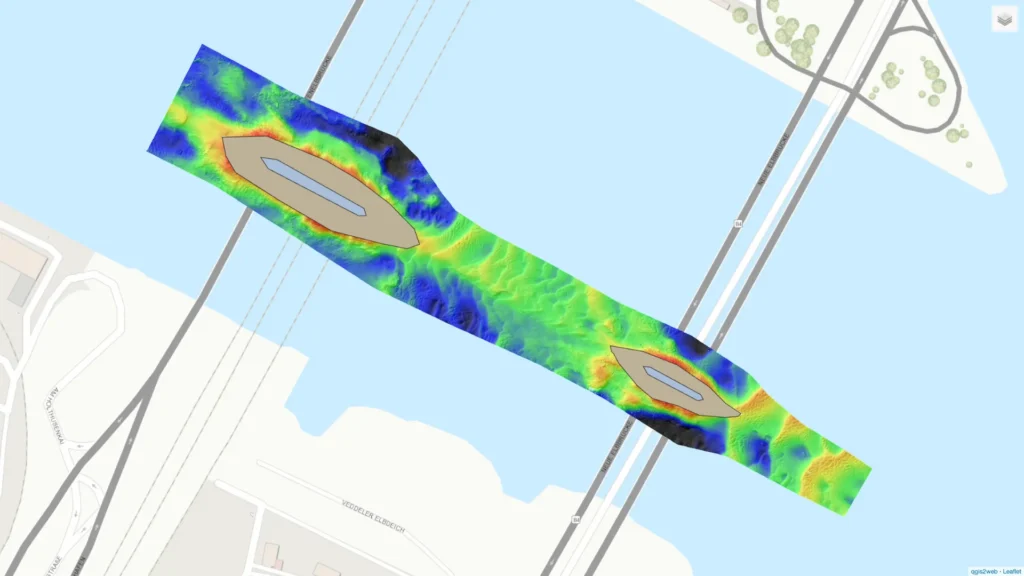
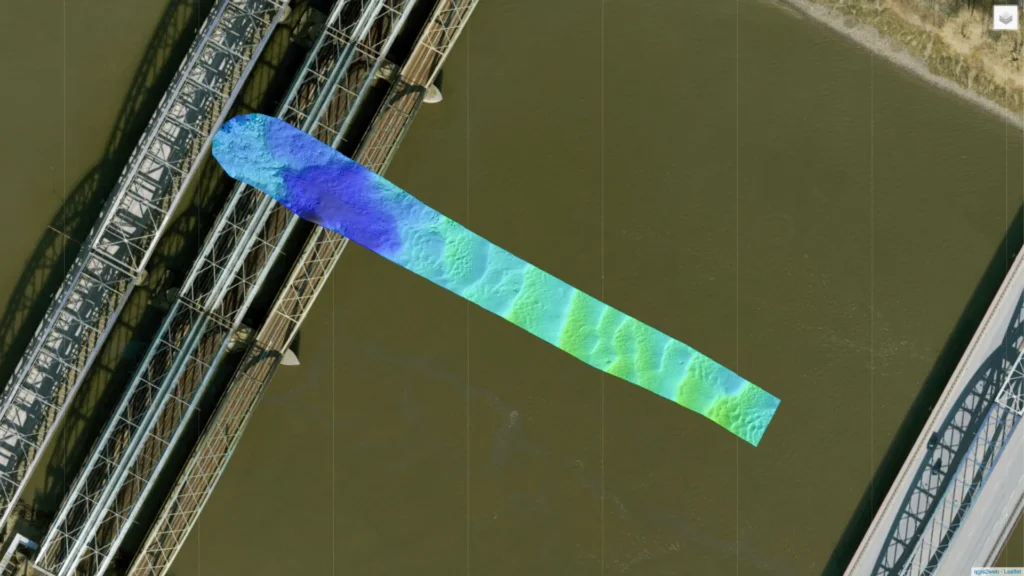
Elbbrücken 网络地图
易北河河面沿易北河桥墩的网络地图,包含测深质量指标和轨迹。差分表面的参考是一个紧耦合的 Horizon 解决方案。对比传感器是一个高端光纤系统。
Elbbrücken 3D 模型
基于SBG Horizon的轨迹数据,对汉堡Elbbrücken下方的测深进行3D可视化。该界面包括测量线、计算出的测深、质量指示层和地形特征。
Elbbrücken 3D 模型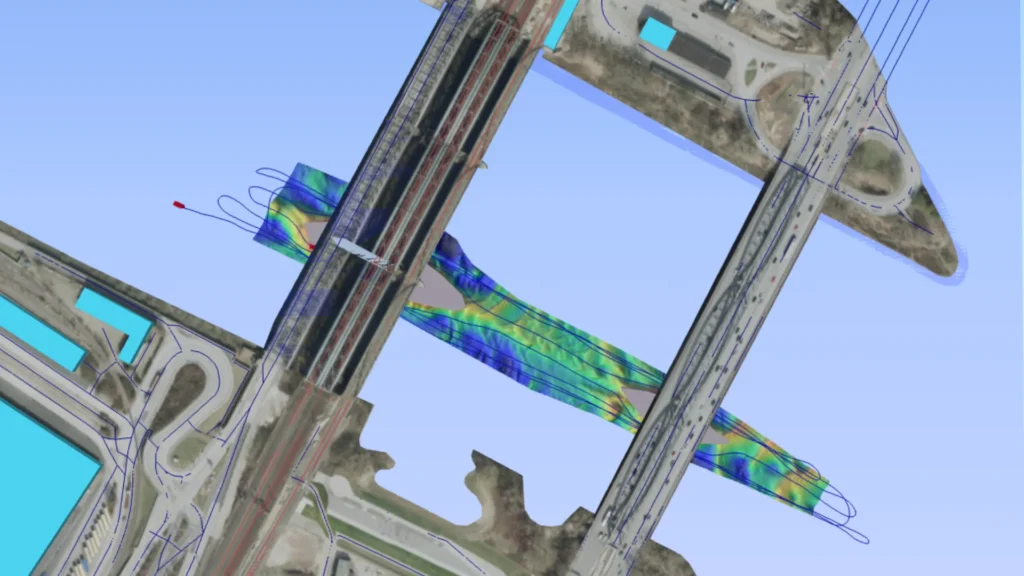
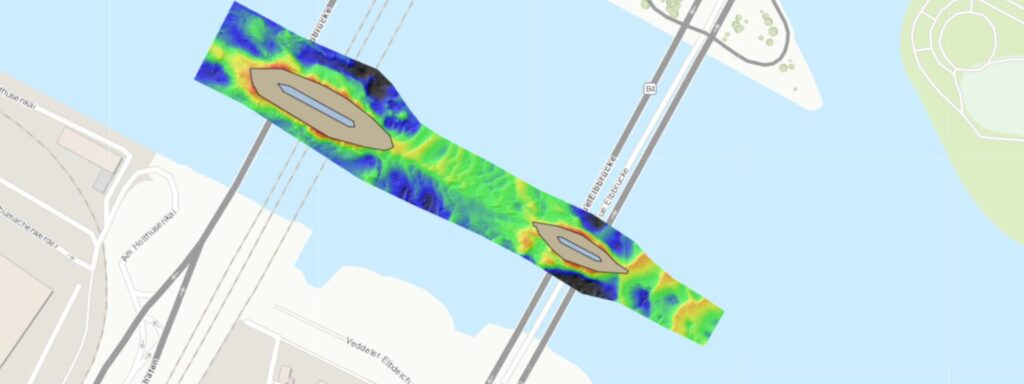
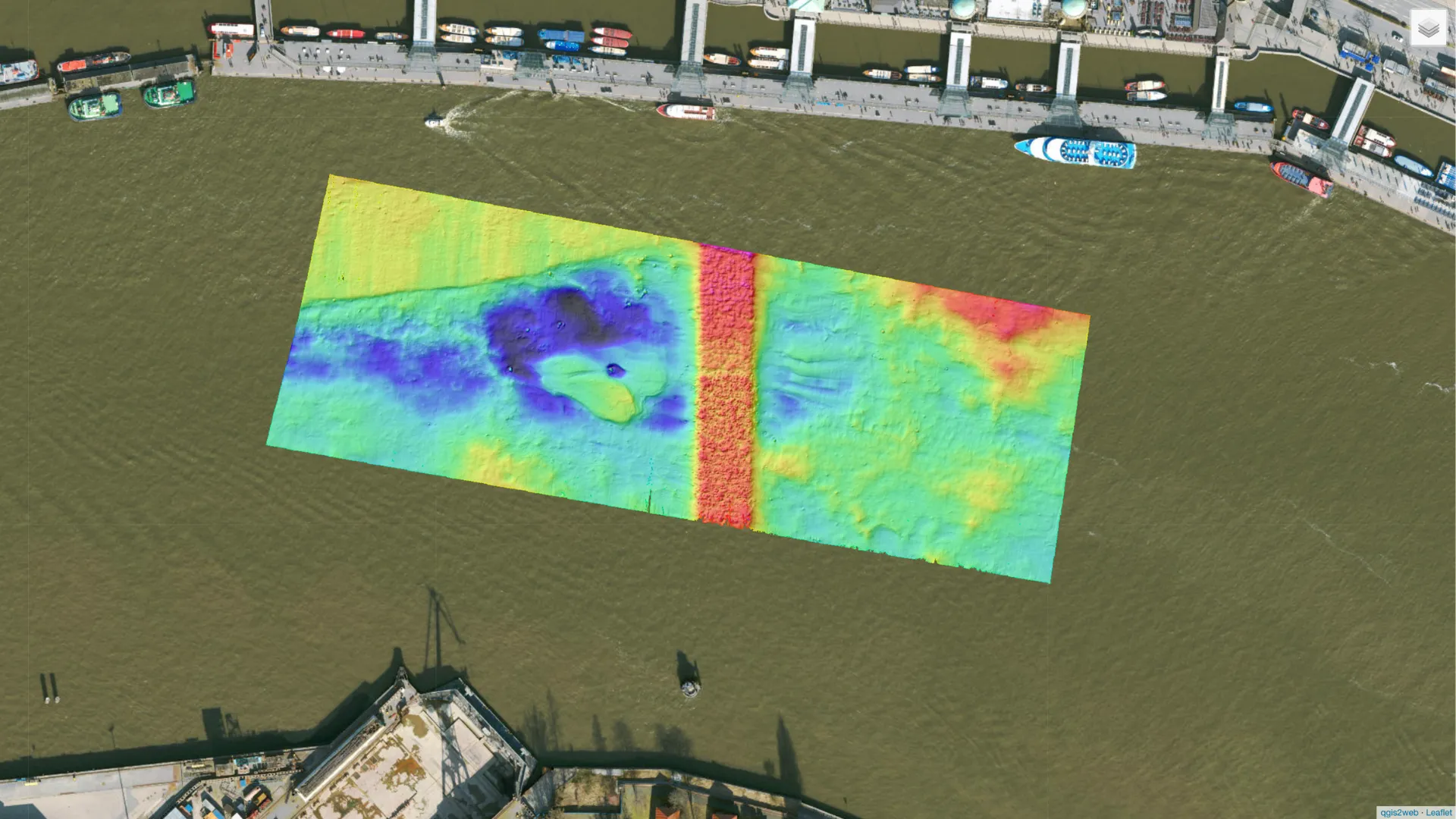
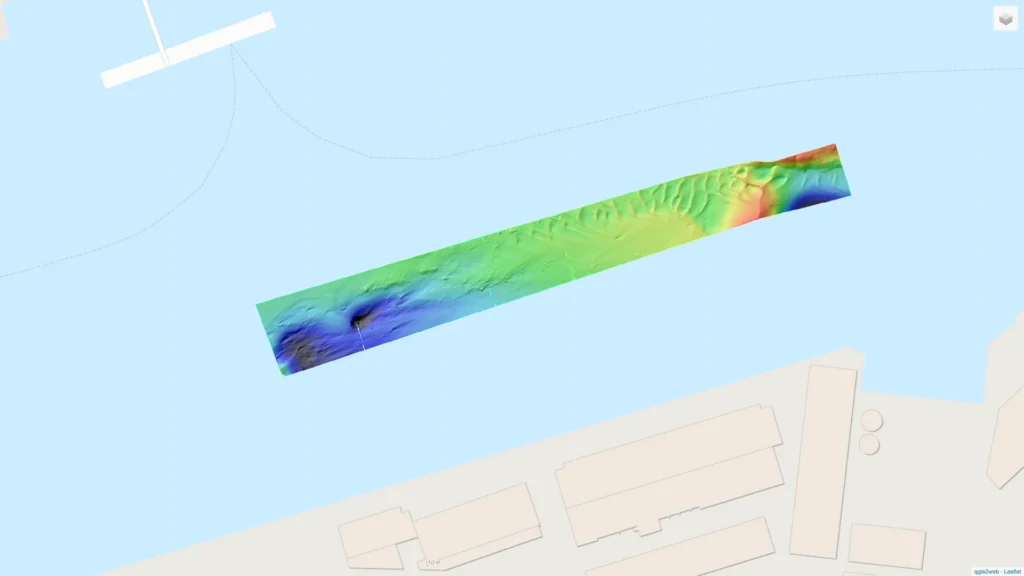
Speicherstadt webmap
易北河沿 Speicherstadt 河道的河面网络地图和测深质量测量,以及轨迹。差异表面的参考是一个紧密耦合的 Horizon 解决方案。对比传感器是一个高端光纤系统。
Speicherstadt 浴盆 3D 模型通道
基于 SBG Horizon 的轨迹数据,对 Speicherstadt 通道沿线的测深进行 3D 可视化。该界面包括测量线、计算出的测深、质量指示层和地形特征。
Speicherstadt 3D 模型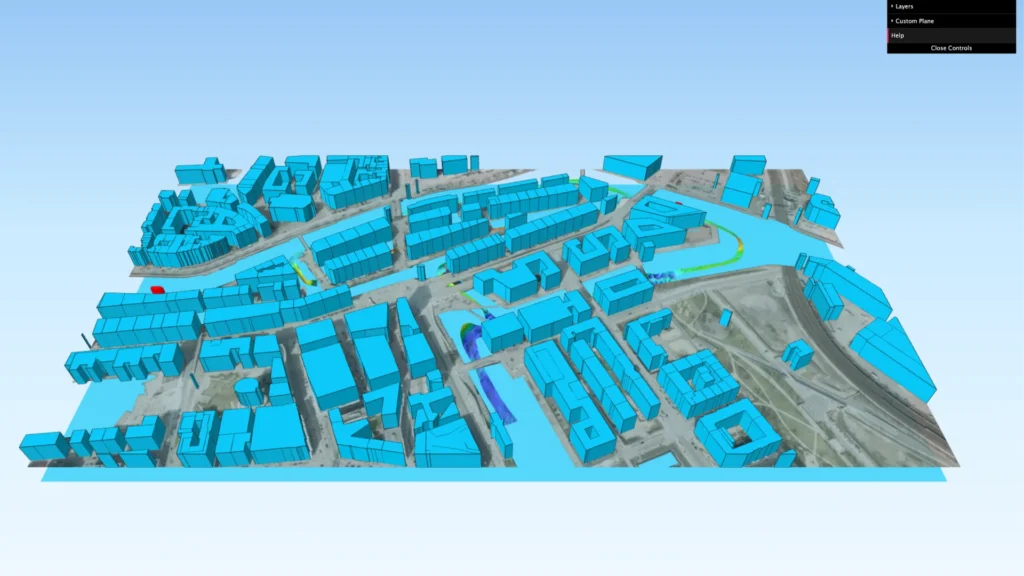
桥下 180° 转弯网络地图
易北河沿 Elbbrücken 的河面网络地图和测深质量测量,以及轨迹。该测量包含在完整的 RTK 中断期间的完整 180° 转弯。差分表面和对比系统的参考是后处理的光纤传感器解决方案。
3 – 运动测试
这些测试模拟了真实世界的动态,评估了在快速加速、振动和旋转运动等各种条件下的性能。通过分析传感器响应,我们改进了校准和补偿算法,以在最苛刻的应用中优化精度。
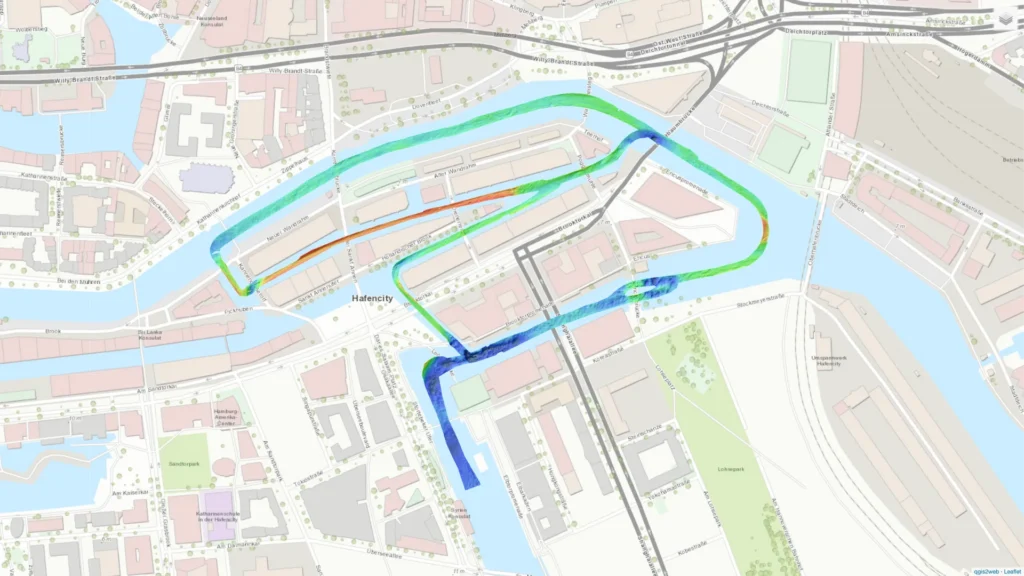
汉堡码头网络地图
易北河河面在汉堡港码头附近的 Webmap,包含测深质量指标和轨迹。在此测试期间,记录了由于船舶通过船只引起的涌浪造成的动态运动模式。差分表面的参考是一个实时光纤传感器解决方案。
汉堡码头三维模型
基于SBG Horizon的轨迹数据,对汉堡港码头旁易北河的测深进行3D可视化。该界面包括测量线、计算出的测深、质量指示层和地形特征。
汉堡港网络地图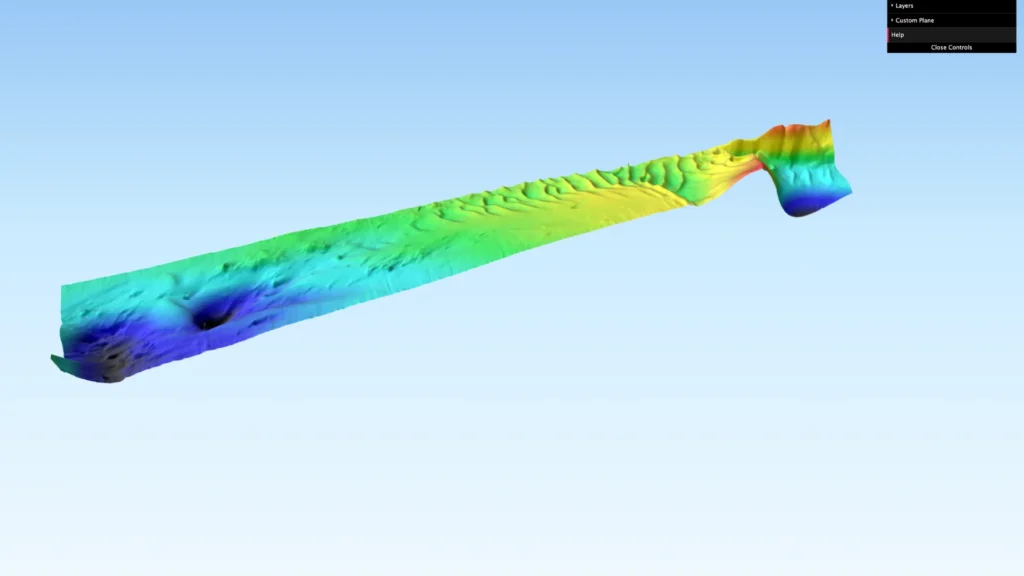
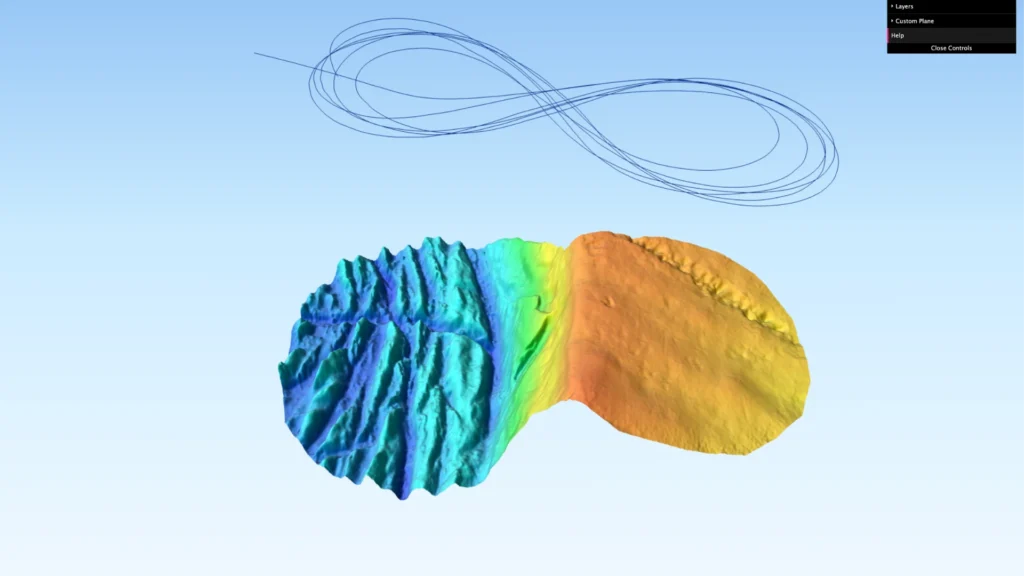
8 图航向精度 网络图
易北河8 图机动时的河面网络图,以及水深质量测量和轨迹。在海洋测深测试中,该机动特别对传感器的航向精度 性能进行了调节。差异表面的参考是实时光纤传感器解决方案。
8 图航向精度 3D 模型
基于 SBG Horizon 的轨迹数据,对易北河在8 字形机动期间的测深进行 3D 可视化。该界面包括测量线、计算出的测深、质量指示层和地形特征。
3D测量模型网络地图