SBG Systems의 관성 내비게이션 시스템은 함부르크(독일) 항구 지역에서 3일간 지속된 수로 측량 중에 테스트되었습니다. SBG Systems와 MacArtney Germany GmbH는 완전한 멀티빔 음향 측심기 측량 구성으로 측량 선박을 장착하고 다양한 까다로운 환경에서 SBG 관성 시스템의 성능을 보여주기 위해 다양한 테스트를 수행했습니다. SBG Systems의 해양 수심 측정 테스트를 살펴보십시오.
테스트 조건
초기에 원시 INS 데이터는 실시간으로 기록되었으며, 수집 소프트웨어인 Teledyne PDS 내에서 RESON SeaBat 7125의 MBES 데이터와 병합되었습니다. 이후 수로 데이터는 BeamWorx AutoClean으로 후처리 및 필터링되었습니다.
또한 INS 데이터는 SBG PPK Software Qinertia를 사용하여 처리되었습니다. 마지막으로, 기준은 긴밀하게 결합된 Horizon 하이엔드 광섬유 솔루션입니다.
이 해양 수심 측정 테스트에 도움을 주신 MacArtney Germany에 감사드립니다.
해양 수심 측량 테스트 보정 절차
해양 수심 측정 테스트 중 SBG Horizon의 움직임 및 궤적 데이터를 기반으로 보정되었습니다.
인터페이스에는 매핑 라인, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
보정 보고서 및 결과
SBG INS는 독일 함부르크에서 3일간의 수로 측량 중 테스트를 거쳤습니다. 또한 SBG Systems와 MacArtney Germany GmbH는 까다로운 조건에서 INS 성능을 평가하기 위해 완전한 멀티빔 에코사운더 구성을 갖춘 측량선을 장비했습니다.
테스트된 센서에는 Horizon, Apogee, Ekinox (Navsight Marine Series) 및 Ellipse가 포함되었습니다. 팀은 원시 INS 데이터를 실시간으로 기록하고 Teledyne PDS를 사용하여 Reson SeaBat 725의 MBES 데이터와 병합했습니다.
이후 Beam Worx AutoClean으로 수로 데이터를 후처리 및 필터링했으며, Qinertia가 INS 데이터 처리를 담당했습니다. 또한 GIS 소프트웨어는 INS 기반 수심 계산 및 품질 레이어를 표시하는 3D 모델과 대화형 웹 지도를 생성했습니다. JavaScript는 레이아웃 형식을 지정하는 데 사용되었습니다. 평가는 모션 및 위치 결정 성능에 중점을 두어 보정 결과, 수심 데이터, 궤적 및 품질 지표를 다루었습니다.
각 해양 수심 테스트에는 GNSS 중단 및 강한 파도에서의 작업과 함께 교량 아래 및 수로 측량이 포함되었습니다. 또한 이 연구는 원시 INS 로그의 느슨하게 결합된 및 긴밀하게 결합된 후처리로 인한 측량 개선 사항을 분석했습니다.
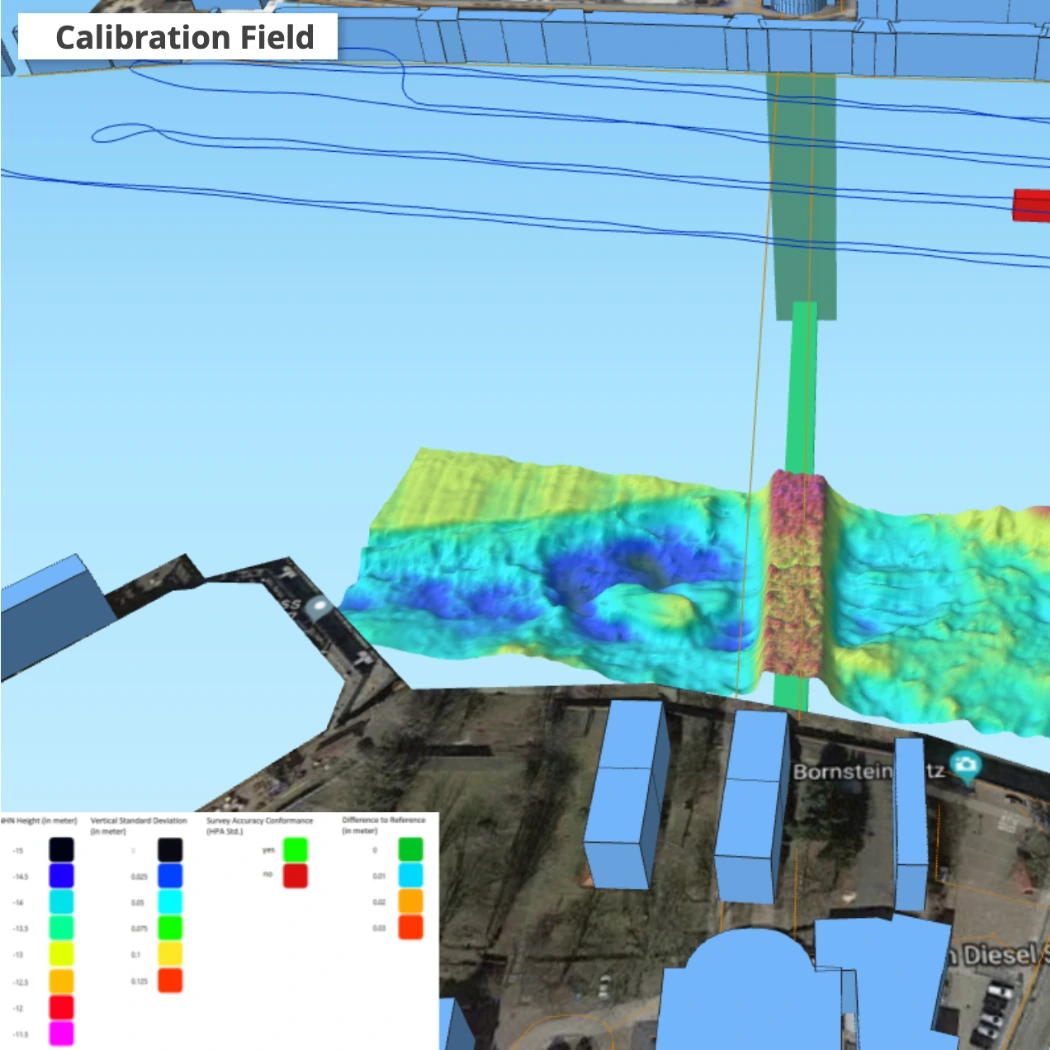
1 – 모션 센서 보정 필드
모션 감지에서 고정밀도를 보장하는 것은 엄격한 보정에서 시작됩니다. 당사의 관성 센서는 바이어스, 스케일 팩터 및 부정합을 보정하기 위해 광범위한 테스트를 거칩니다. 고급 다축 플랫폼과 제어된 환경을 사용하여 이 프로세스는 광범위한 작동 조건에서 센서 정확도와 안정성을 향상시킵니다. 각 센서의 응답을 미세 조정함으로써 보정은 항공 우주, 해양 및 자율 내비게이션과 같은 까다로운 애플리케이션에서 안정적인 성능을 보장합니다.
3D 모델
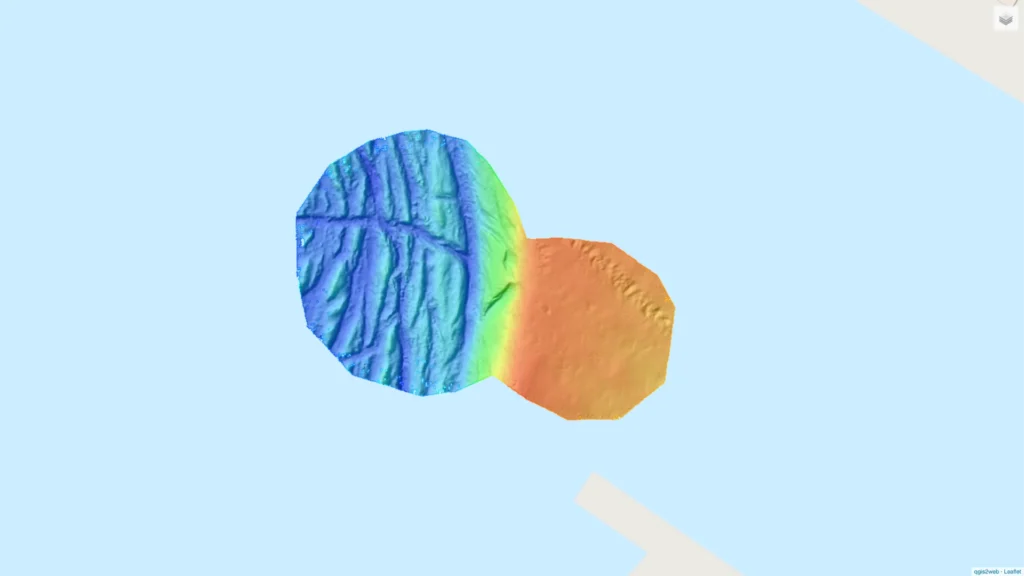
SBG Horizon의 모션 및 궤적 데이터를 기반으로 모션 센서 보정을 위한 매핑 영역의 3D 시각화. 인터페이스에는 매핑 라인, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
3D 매핑 지도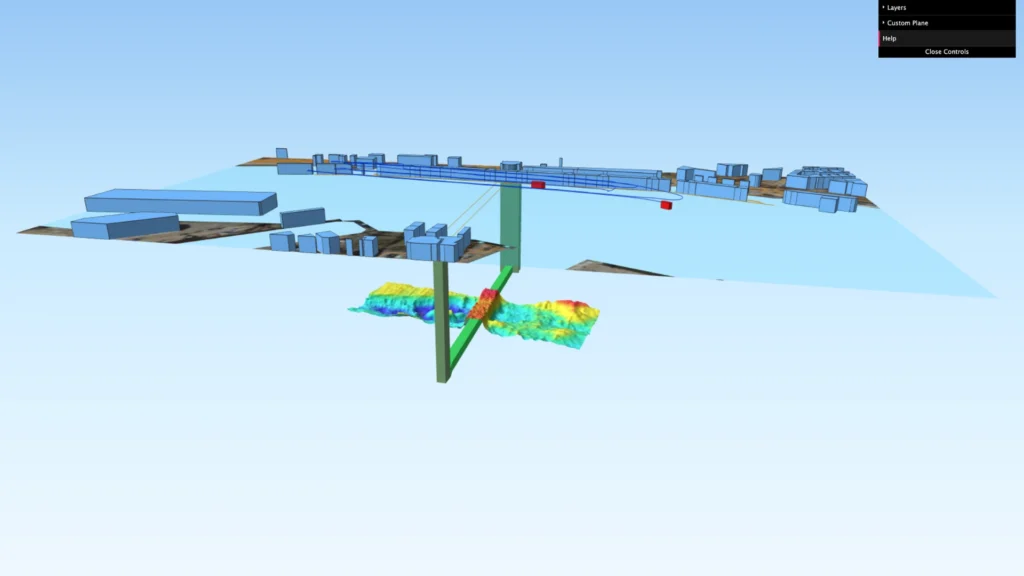
보정 보고서/오프셋
각 SBG 관성 시스템에 대한 보정 보고서 및 권장 장착 각도입니다. BeamworX Autopatch 패칭 소프트웨어는 이러한 모든 보고서를 생성합니다. 정렬 매핑 중에 팀은 선박 구성 및 센서 설정을 기반으로 각 센서에 대한 오프셋을 측정한 다음 Cremer Caplan을 사용하여 평가했습니다.
정밀 단독 측위 테스트
Qinertia의 새로운 PPP 처리 모드 테스트. RTK(실시간) 및 PPP(후처리) INS 솔루션을 기반으로 수심측량 표면 및 품질 레이어가 계산되었습니다.
2 – 관성 테스트
관성 센서는 엄격하게 통제된 환경에서 고정밀도와 신뢰성을 보장하기 위해 철저한 테스트를 거칩니다. 이러한 테스트는 바이어스 안정성, 스케일 팩터 정확도, 노이즈 수준 및 동적 응답과 같은 주요 성능 지표를 평가합니다. 온도 변화 및 진동 프로파일을 포함한 실제 조건을 시뮬레이션하여 엔지니어는 센서의 복원력과 정확성을 검증합니다. 궁극적으로 광범위한 관성 테스트를 통해 제조업체는 방위, 항공 우주 및 자율 시스템의 중요한 임무 애플리케이션에 대한 최적의 성능을 보장합니다.
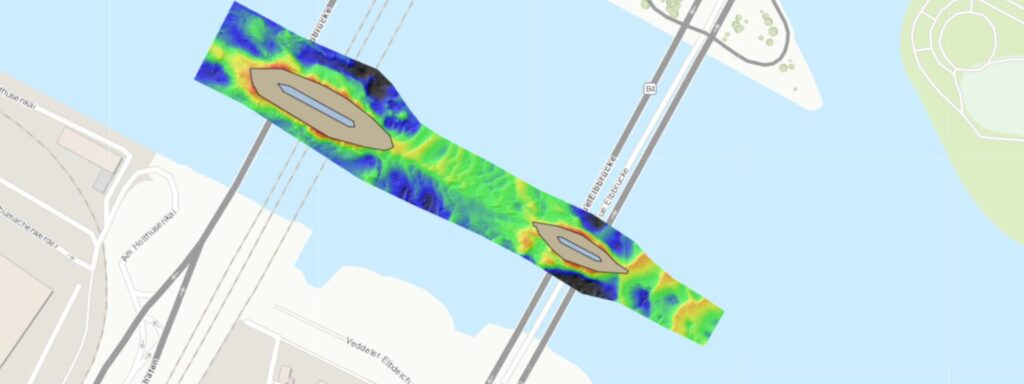
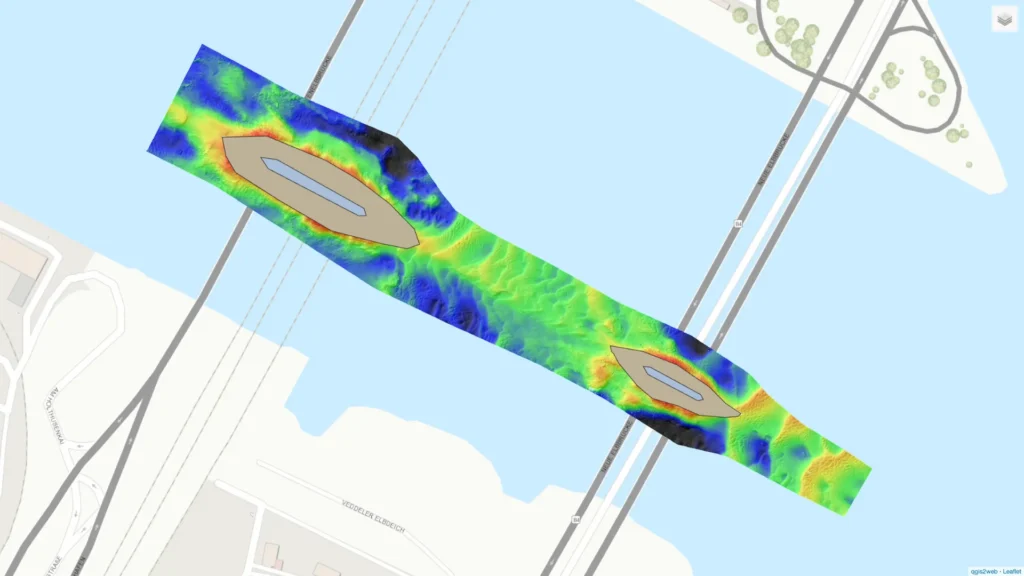
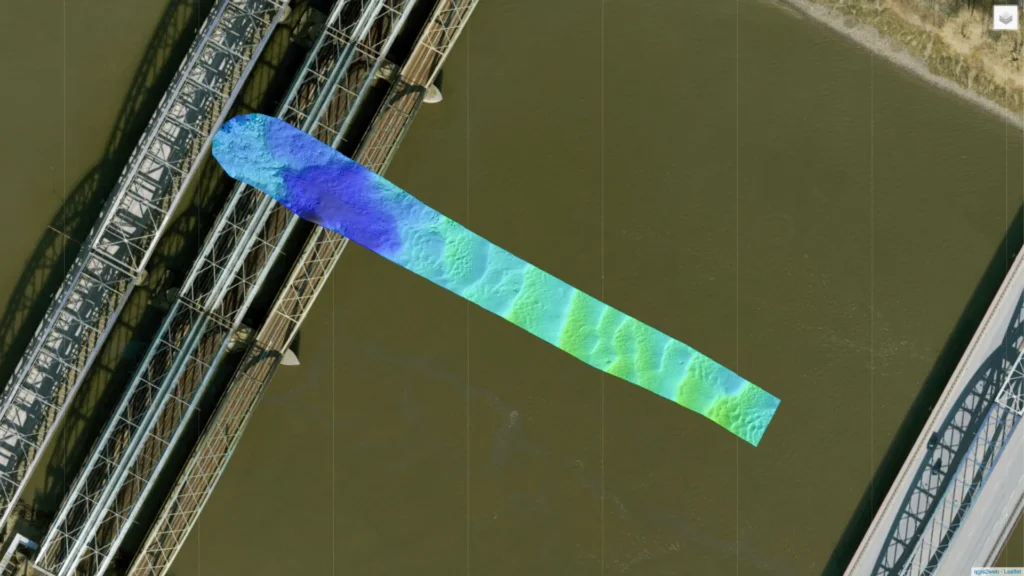
Elbbrücken 웹 지도
Elbbrücken 교각을 따라 엘베강 표면의 웹맵과 수심 측정 품질 측정값 및 궤적입니다. 차이 표면에 대한 기준은 긴밀하게 결합된 Horizon 솔루션입니다. 비교 센서는 고급 광섬유 시스템입니다.
Elbbrücken 3D 모델
SBG Horizon의 궤적 데이터를 기반으로 함부르크의 Elbbrücken 아래 수심의 3D 시각화. 인터페이스에는 매핑 라인, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
Elbbrücken 3D 모델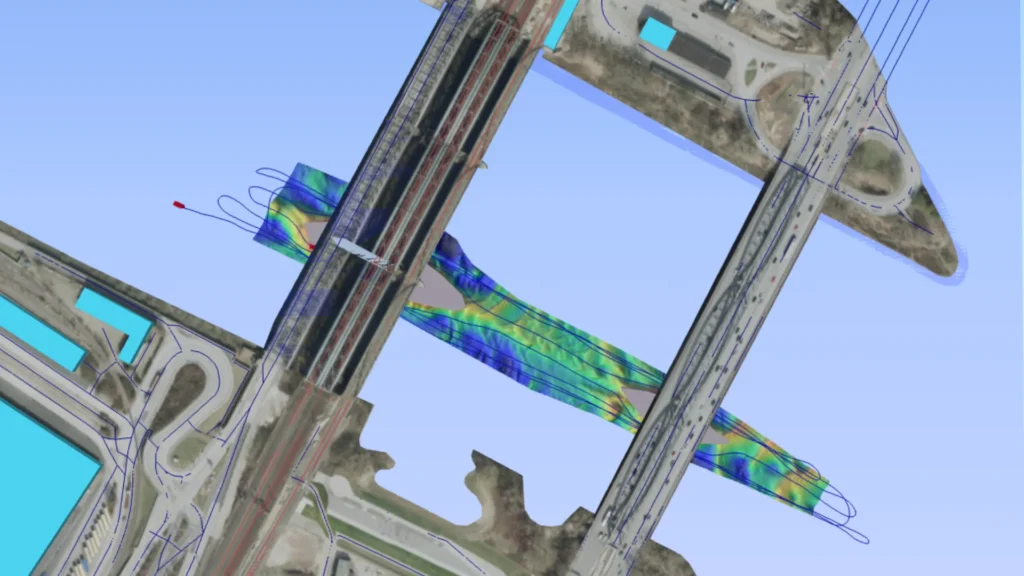
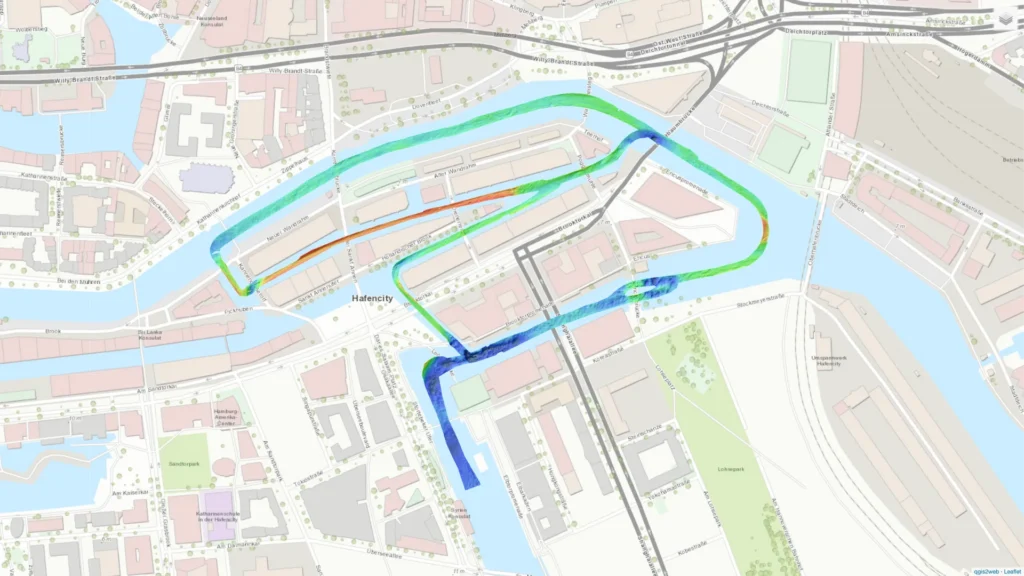
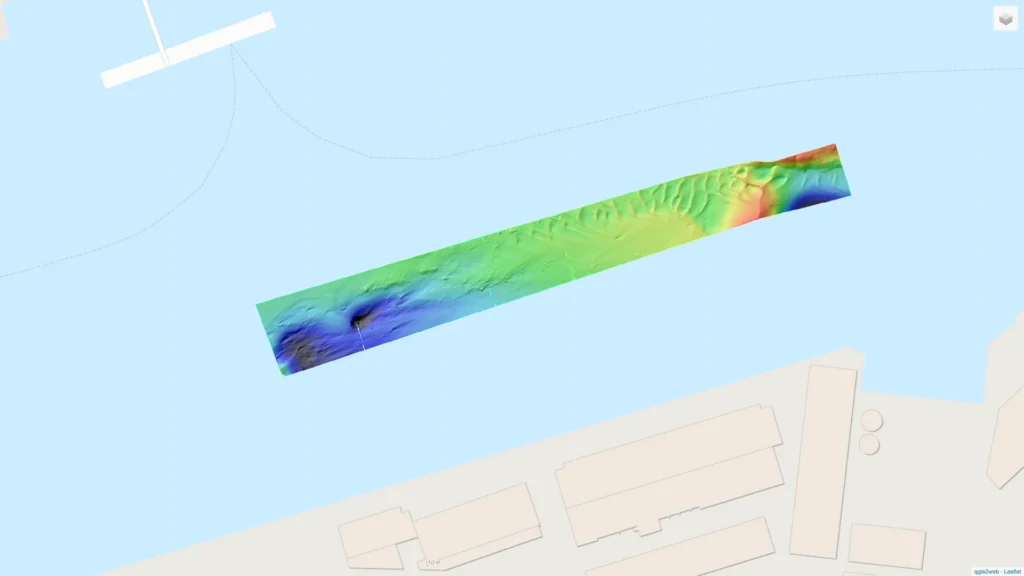
Speicherstadt 웹 맵
Speicherstadt의 수로를 따라 엘베 강 표면의 웹 매핑 및 수심 측정 품질 측정, 그리고 궤적. 차이 표면에 대한 기준은 긴밀하게 결합된 Horizon 솔루션입니다. 비교 센서는 고급 광섬유 시스템입니다.
Speicherstadt 수심 측량 3D 모델 채널
SBG Horizon의 궤적 데이터를 기반으로 Speicherstadt 수로를 따라 수심에 대한 3D 시각화를 제공합니다. 인터페이스에는 측량선, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
Speicherstadt 3D 모델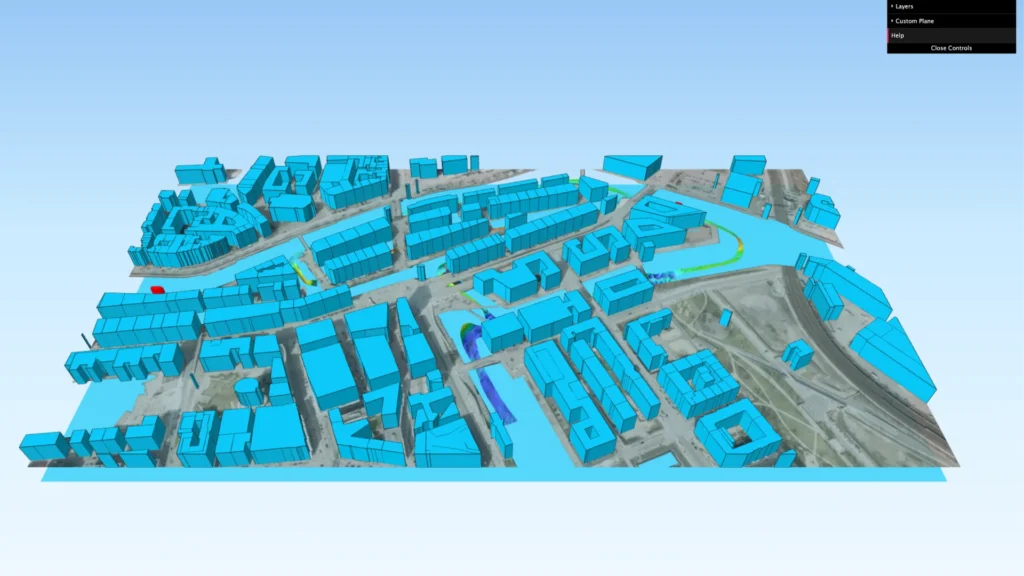
교량 하부 180° 회전 웹 매핑
엘베강의 엘브교를 따라 흐르는 강 표면의 웹맵과 수심 측정 품질 지표 및 궤적. 이 측량에는 완전한 RTK 중단 중 180도 회전이 포함됩니다. 차이 표면 및 비교 시스템의 기준은 후처리된 광섬유 센서 솔루션입니다.
3 – 모션 테스트
이러한 테스트는 급가속, 진동 및 회전 운동과 같은 다양한 조건에서 성능을 평가하여 실제 역학을 시뮬레이션합니다. 센서 응답을 분석하여 가장 까다로운 애플리케이션에서 정밀도를 최적화하기 위해 보정 및 보상 알고리즘을 개선합니다.
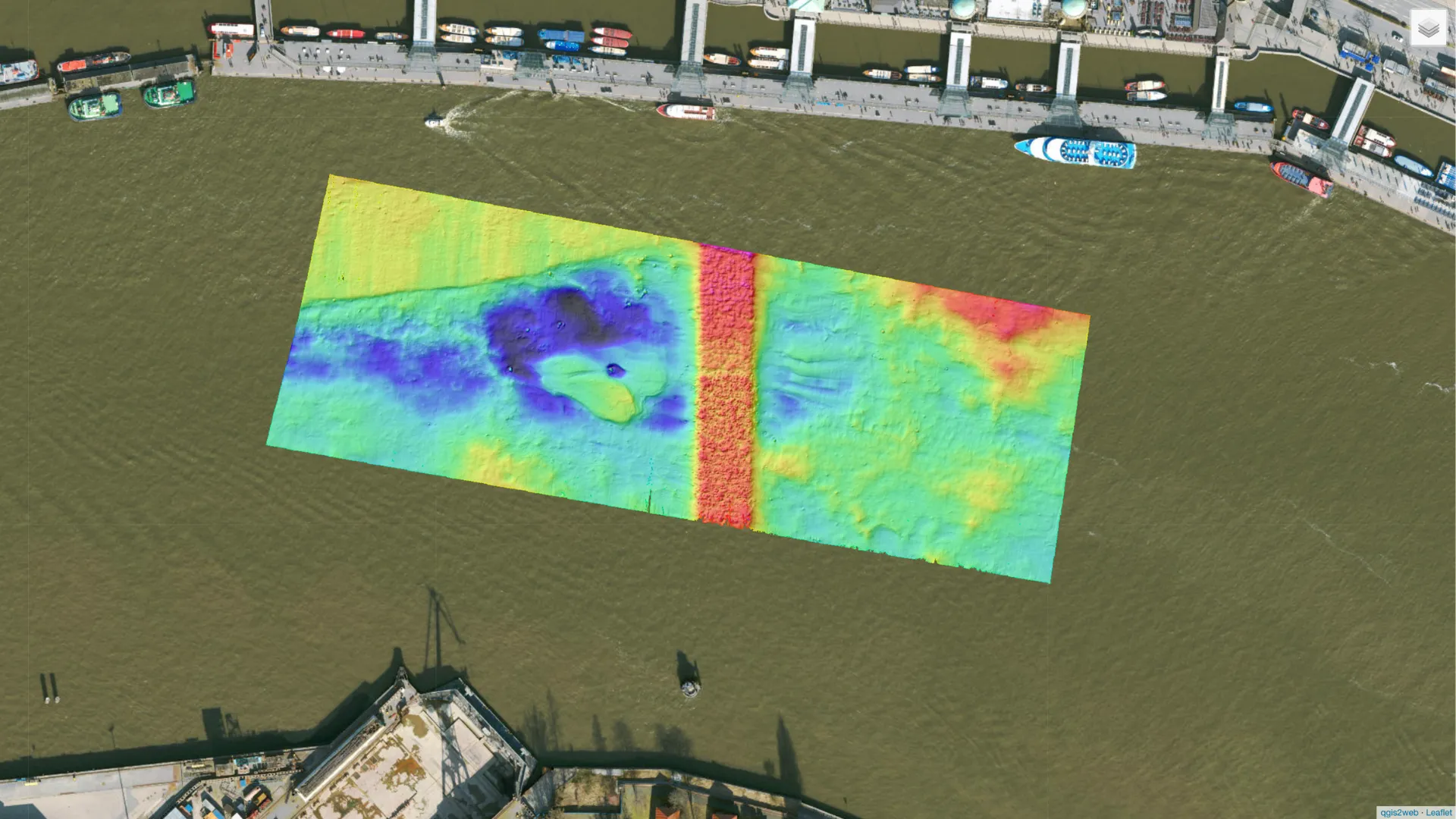
함부르크 부두 웹 지도
함부르크 항구의 도크 옆 엘베강 표면의 웹맵과 수심 측정 품질 측정값 및 궤적입니다. 이 테스트 동안 선박이 지나갈 때 유발되는 너울로 인한 동적 모션 패턴이 기록되었습니다. 차이 표면에 대한 기준은 실시간 광섬유 센서 솔루션입니다.
함부르크 부두 3D 모델
SBG Horizon의 궤적 데이터를 기반으로 함부르크 항구의 부두 옆 엘베 강 수심의 3D 시각화. 인터페이스에는 매핑 라인, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
함부르크 항구 웹 지도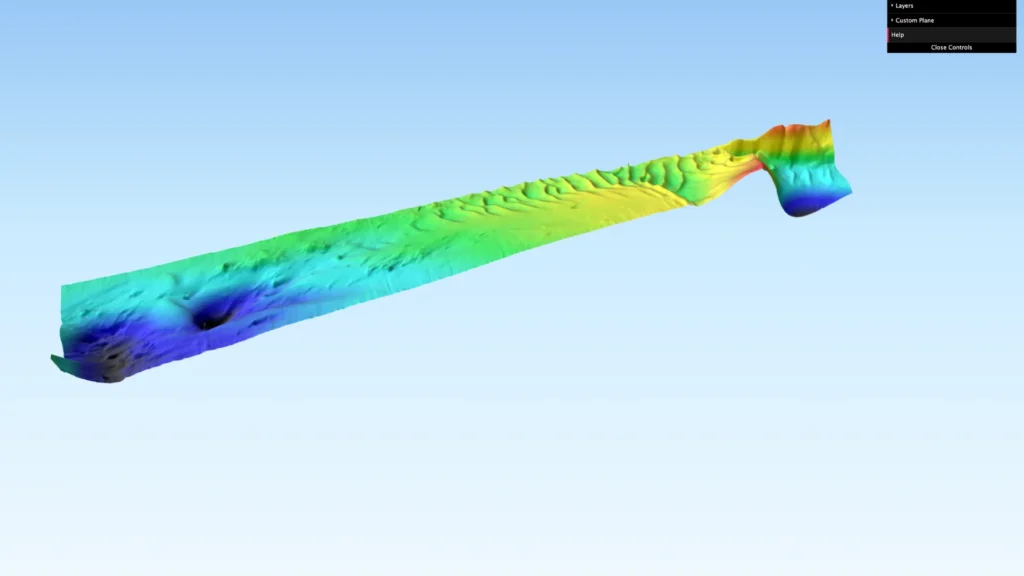
8 그림 제목 웹맵
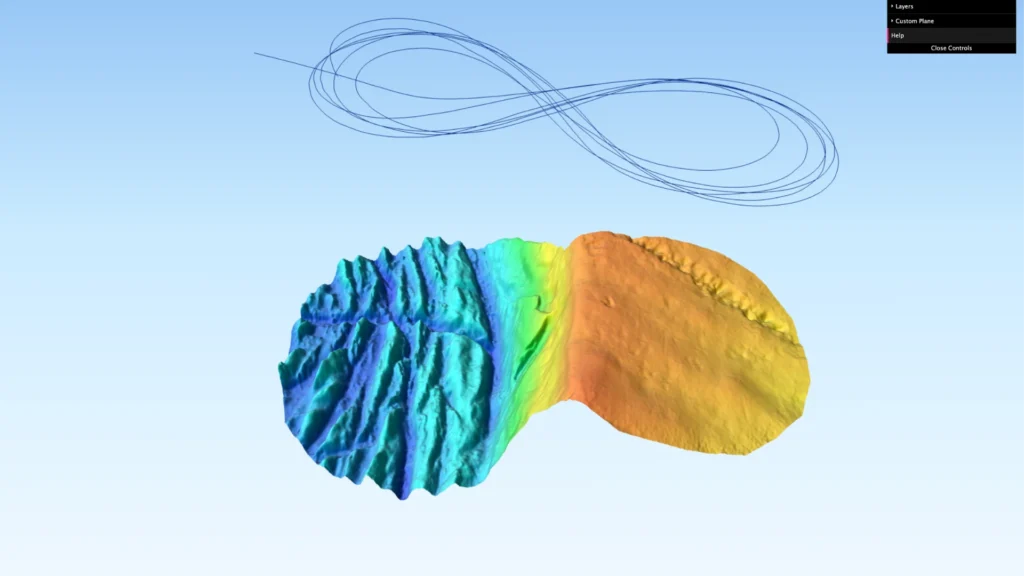
8자 기동 중 엘베강 표면의 웹맵과 수심 측정 품질 측정값 및 궤적입니다. 이 기동은 해양 수심 측정 테스트 중 센서의 헤딩 성능과 관련하여 특히 중요합니다. 차이 표면에 대한 기준은 실시간 광섬유 센서 솔루션입니다.
8 그림 제목 3D 모델
SBG Horizon의 궤적 데이터를 기반으로 8자 기동 중 Elbe강의 수심에 대한 3D 시각화를 제공합니다. 인터페이스에는 측량선, 계산된 수심, 품질 표시 레이어 및 지형지물이 포함됩니다.
3D 매핑 모델 웹 지도