
精密单点定位技术 (PPP) 中的模糊度解算是解决载波相位测量中整数模糊度的方法。主要目标是将 PPP 从厘米级精度提高到毫米级可靠性。解锁这些整数值使 PPP 能够提高定位精度并减少收敛时间。将 PPP 与模糊度解算 (AR) 相结合的方法(通常称为 PPP-AR)利用了经过仔细建模的相位和代码偏差以及高保真卫星时钟产品。
模糊度解算过程旨在减少不确定性,并使估计器能够将相位测量视为固定整数。反过来,这具有提高可靠性和准确性的作用。我们调查了多个分析中心生成的相位偏差产品的互操作性和交叉验证。此分析的目的是鼓励一致的标准,促进结果的组合并促进实时实施。
实际上,已证明 PPP 中模糊度的解算可以加速收敛,提高修复率并加强位置完整性,即使在具有挑战性的信号条件下也是如此。随着 GNSS 星座的扩展和建模技术的改进,具有模糊度解算的 PPP 正在成为高精度应用的关键工具,应用范围从测量到自主导航。
SBG Systems 开发了一种名为 Orbi AR(模糊度解算)的新技术,该技术可在不依赖本地参考站或密集地面基础设施的情况下,通过 GNSS 提供厘米级的精度。
为什么使用 Orbi AR 而不是 RTK?
在本节中,我们将研究关键因素——包括部署速度、运营弹性和用户体验——这些因素正在改变平衡,为在现代复杂工作场所中选择 Orbi AR 的多功能性和可访问性而不是 RTK 的传统约束提供明确的理由。
RTK – 差分 GNSS
RTK 的工作原理是使用两个接收器:
- 基站接收器设置在已知的固定位置,它通过将其已知位置与接收到的 GNSS 信号进行比较来计算误差。
- 一个移动站(静态/动态),它从附近的基站接收器接收误差校正,并将其应用于其自身的信号,以获得高度精确的相对位置。
精度非常高,但流动站必须相对靠近基站(通常为 10 到 30 公里,具体取决于大气条件),因为许多误差(如大气延迟)是局部的。
Orbi AR – 精密单点定位
Orbi AR 不使用单个本地基站来查找相对误差,而是使用全球可用的校正数据来完全独立地计算其自身的高精度绝对位置。 全球校正包括高精度的卫星轨道和时钟信息,以及大气延迟模型。
| 特征 | Orbi AR | RTK |
|---|---|---|
| 本地基站 | 不需要 | 必要 |
| 覆盖范围 | 全球 | 本地(30 公里范围内的单基站;80 公里范围内的 VRS) |
| 精度 | 静态 2-5cm (2 sigma) 动态 2-3cm (1 sigma) | 厘米 (cm) |
| 设置 | 简单(仅一个接收器) | 复杂(需要本地基站设置) |
简单来说,你可以把这种差异想象成两个学生准备考试。RTK 就像一个接受私人辅导的学生,辅导老师已经知道正确答案,并利用其经验帮助学生纠正错误。
另一方面,Orbi AR 则像一个独自学习的学生,但会仔细对照书本核对答案。虽然私人辅导可能稍微更准确,但其设置难度更大,成本也更高。尽管这两种方法都能带来准确的结果,但获取校正数据的方式——通过附近的辅导老师(RTK)或全球可用的书本(PPP)——是它们之间的区别所在。
Orbi AR 是如何工作的?
标准的 GNSS 接收器会受到几个重大误差的影响:
- 卫星轨道误差: 卫星并不完全在其广播消息中所说的位置。
- 卫星时钟误差: 卫星的原子钟存在微小但非常重要的计时误差。
- 大气延迟: 电离层和平流层会减慢并弯曲 GNSS 信号。
这些传输误差和定时误差结合起来会导致接收器计算出的位置不准确。有关更多解释,请参见 GNSS 及其误差源以及大气误差对 RTK 和 PPK 处理的影响。
Orbi AR 的核心原则是使用精确的校正数据来优化上述误差:
- 国际 GNSS 服务 - IGS 以极高的精度计算每颗卫星的精确轨道和精确时钟误差。
- 一个全球参考站网络覆盖所有区域运行,并应用复杂的算法进行轨道确定和卫星相位偏差估计。
- 一旦生成相位偏差,就会在多个控制站进行专门的验证阶段,控制与校正集一起使用的每个卫星测量值。
- 使用双频GNSS观测来减轻电离层延迟,获得不受电离层影响的测量结果,而无需依赖外部电离层模型
- 高级建模 用于估计和以数学方式解决对流层造成的延迟。

Orbi AR 的主要优势
Orbi AR 代表了精确地理空间数据在现场收集、可视化和利用方式的根本性进步,远远超出了仅依赖卫星定位的传统限制。以下是 Orbi AR 的主要优势:
- 全球覆盖:在海洋、沙漠或任何偏远地区的中心实现高精度,而无需本地基站。
- 高精度:提供厘米级定位[测试报告即将发布]
- 区域一致性:在全球范围内提供统一的精度。
- 快速收敛时间:现代技术减少了达到厘米级精度所需的时间
- 可扩展性:非常适合大众市场和全球应用,因为不需要本地参考站。
- 成本效益:减少对密集地面校正网络的依赖,从而降低基础设施成本。
Qinertia 软件中的 Orbi AR
Qinertia 后处理软件通过将 Orbi AR 与 Qinertia 的大地测量引擎和处理技术相结合,将 Orbi AR 提升到了一个新的水平。
大地测量引擎:将 Orbi AR 精度转化为本地环境
虽然 Orbi AR 解决方案可提供高度精确的位置,但最终用户仍然面临着一个重大挑战:如何将这些结果从 ITRF 2020 转换为本地基准,以便与已知的参考点进行比较。这一关键步骤通常需要复杂的大地测量转换,从而为非专业人士带来很高的出错风险。
Qinertia 通过其内置的大地测量引擎直接应对这一挑战。该引擎具有全面的公共转换数据库,可实现无缝且准确的坐标转换。通过在内部处理所有基准转换,Qinertia 的引擎消除了潜在误差的主要来源。它确保 PPP 导出的位置以用户所需的坐标系自动且正确地表达,从而使从原始数据到可用、本地化结果的整个工作流程更加简单和可靠。
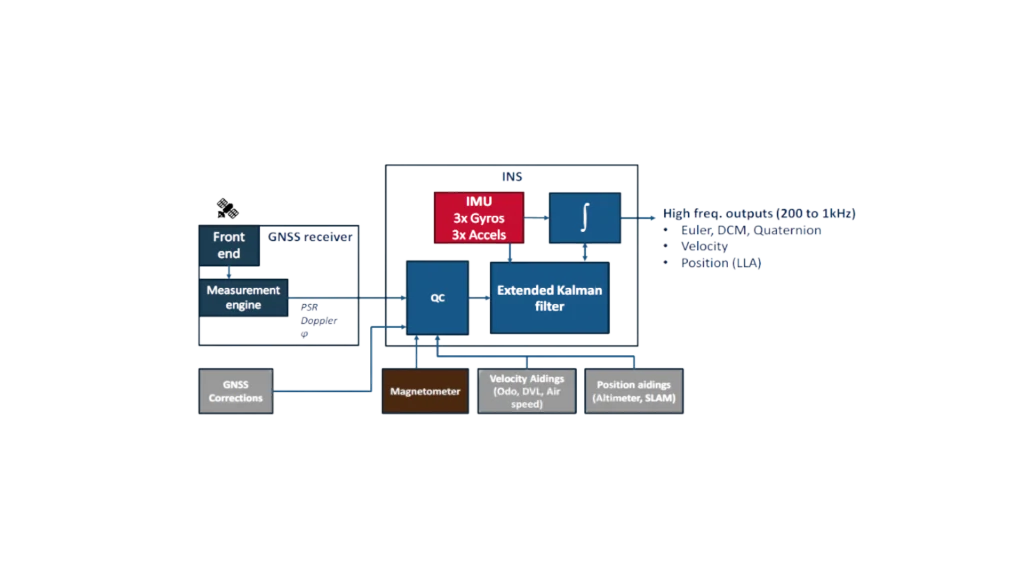
处理技术:将 Orbi AR 与 IMU 融合,实现无与伦比的可靠性
Qinertia 的处理核心旨在最大限度地提高 Orbi AR 的可靠性,它采用前向、后向和合并技术,从而缩短了收敛时间,降低了噪声并增强了可靠性。

此外,紧耦合 PPP 处理模式融合了 GNSS 接收器的原始测量数据,并在基础层面上将其与 IMU 结合,从而获得更强大和连续的导航解决方案。与 IMU 的紧密耦合提供了额外的约束,有助于减少收敛时间,并显著加快信号丢失后的重新收敛速度。
OrbiQinertia Cloud
Qinertia Cloud Qinertia公司Qinertia Cloud 先进GNSS 网络平台。依托尖端的Orbi AR技术Qinertia Cloud 网页浏览器中直接Qinertia Cloud 原始GNSS Qinertia Cloud 高精度成果。
Qinertia Cloud