
A resolução de ambiguidade na tecnologia de posicionamento de ponto preciso (PPP) é um método que resolve ambiguidades inteiras em medições de fase da portadora. O objetivo principal é avançar o PPP da precisão em nível de centímetro para a confiabilidade em nível de milímetro. O desbloqueio desses valores inteiros permite que o PPP melhore a precisão do posicionamento e reduza os tempos de convergência. A abordagem que combina PPP com resolução de ambiguidade (AR), frequentemente chamada de PPP-AR, aproveita polarizações de fase e código cuidadosamente modeladas, bem como produtos de relógio de satélite de alta fidelidade.
O processo de resolução de ambiguidade serve para reduzir as incertezas e permite que o estimador trate as medições de fase como inteiros fixos. Isso, por sua vez, tem o efeito de aumentar a confiabilidade e a precisão. Investigamos a interoperabilidade e a validação cruzada de produtos de polarização de fase gerados por vários centros de análise. O objetivo desta análise é incentivar padrões consistentes, facilitar a combinação de resultados e promover a implementação em tempo real.
Na prática, a resolução de ambiguidade dentro do PPP demonstrou acelerar a convergência, melhorar as taxas de correção e fortalecer a integridade da posição, mesmo em condições de sinal desafiadoras. À medida que as constelações GNSS se expandem e as técnicas de modelagem melhoram, o PPP com resolução de ambiguidade está emergindo como uma ferramenta fundamental para aplicações de alta precisão, desde levantamentos até navegação autônoma.
A SBG Systems desenvolveu uma nova tecnologia chamada Orbi AR (Ambiguity Resolution), que oferece precisão em nível de centímetro com GNSS sem depender de estações de referência locais ou infraestrutura terrestre densa.
Por que usar o Orbi AR em vez do RTK?
Nesta seção, examinaremos os fatores críticos—incluindo a velocidade de implantação, a resiliência operacional e a experiência do usuário—que estão mudando o equilíbrio, fornecendo uma justificativa clara para escolher a versatilidade e a acessibilidade do Orbi AR em relação às restrições convencionais do RTK em locais de trabalho modernos e complexos.
RTK – GNSS Diferencial
O RTK funciona com dois receptores:
- Um receptor de estação base é configurado em um local fixo e conhecido, e calcula os erros comparando sua posição conhecida com o sinal GNSS que recebe.
- Um rover (estático/cinemático) que recebe as correções de erro de um receptor de estação base próximo e as aplica ao seu próprio sinal para obter uma posição relativa altamente precisa.
A precisão é muito alta, mas o rover deve estar relativamente próximo à estação base (normalmente de 10 a 30 km, dependendo das condições atmosféricas), porque muitos erros (como atrasos atmosféricos) são locais.
Orbi AR – Posicionamento Pontual Preciso
Em vez de usar uma única estação base local para encontrar erros relativos, o Orbi AR usa dados de correção disponíveis globalmente para calcular sua própria posição absoluta com alta precisão, de forma completamente independente. A correção global inclui informações altamente precisas sobre a órbita e o clock do satélite, bem como modelos para atrasos atmosféricos.
| Característica | Orbi AR | RTK |
|---|---|---|
| Estação base local | Não necessária | Necessária |
| Cobertura | Global | Local (base única dentro de 30 km; VRS dentro de 80 km) |
| Precisão | Estático 2-5cm em 2 sigma Cinemático 2-3cm em 1 sigma | Centímetro (cm) |
| Configuração | Simples (apenas um receptor) | Complexo (requer configuração de base local) |
Para simplificar, imagine a diferença como dois estudantes se preparando para uma prova. O RTK é como um estudante que recebe aulas particulares, onde um já tem a resposta correta e usa sua experiência para ajudar o outro a corrigir erros.
O Orbi AR, por outro lado, é como um único estudante trabalhando sozinho, mas verificando cuidadosamente suas respostas em um livro. Embora o tutor particular possa ser ligeiramente mais preciso, é muito mais difícil de configurar e mais caro. E, embora ambas as abordagens levem a resultados precisos, a forma como as correções são obtidas — através de um tutor próximo (RTK) ou de um livro disponível globalmente (PPP) — é o que as diferencia.
Como funciona o Orbi AR?
Um receptor GNSS padrão é afetado por vários erros significativos:
- Erros na Órbita do Satélite: O satélite não está exatamente onde sua mensagem de transmissão diz que está.
- Erros no Clock do Satélite: O clock atômico do satélite tem pequenos, mas significativos, erros de tempo.
- Atrasos Atmosféricos: A ionosfera e a troposfera retardam e desviam os sinais GNSS.
Esses erros de transmissão e erros de tempo se combinam para produzir imprecisões na posição calculada do receptor. Para mais explicações, consulte GNSS e suas fontes de erro e efeito de erros atmosféricos no processamento RTK e PPK.
O princípio fundamental do Orbi AR é refinar os erros acima usando dados de correção precisos:
- O International GNSS Service-IGS calcula a órbita exata e o erro de clock exato para cada satélite com extrema precisão.
- A Rede Global de Estações de Referência opera em todas as regiões e aplica algoritmos complexos para a determinação de órbita e estimação de bias de fase de satélite.
- Uma vez que a polarização de fase é gerada, um estágio de verificação dedicado é operado em várias estações de controle, controlando cada medição de satélite usada com o conjunto de correções.
- Usa observações GNSS de dupla frequência para mitigar o atraso ionosférico, obtendo medições livres de ionosfera sem recorrer a modelos ionosféricos externos
- Modelagem Avançada é aplicada para estimar e resolver matematicamente o atraso da troposfera.

Principais Benefícios do Orbi AR
O Orbi AR representa um avanço fundamental na forma como os dados geoespaciais precisos são coletados, visualizados e utilizados em campo, indo muito além das restrições tradicionais do posicionamento apenas por satélite. A seguir, os principais benefícios do Orbi AR:
- Cobertura global: alcançando alta precisão no meio do oceano, em um deserto ou em qualquer local remoto, sem a necessidade de uma estação base local.
- Alta precisão: fornecendo posicionamento em nível de centímetro [Relatório de teste em breve]
- Consistência entre regiões: fornece precisão uniforme em todo o mundo.
- Tempo de convergência rápido: a técnica moderna reduz o tempo necessário para atingir a precisão em nível de centímetro
- Escalabilidade: ideal para aplicações de mercado de massa e globais, uma vez que não são necessárias estações de referência locais.
- Custo-efetividade: reduz a dependência de redes de correção terrestres densas, diminuindo os custos de infraestrutura.
Orbi AR no software Qinertia
O Qinertia, o software de Pós-Processamento, leva o Orbi AR para o próximo nível, combinando-o com o Geodesy Engine do Qinertia e tecnologias de processamento.
Geodesy Engine: Transformando a precisão do Orbi AR em contexto local
Embora as soluções Orbi AR forneçam posições altamente precisas, um desafio significativo permanece para os usuários finais: traduzir esses resultados do ITRF 2020 para um datum local para comparação com pontos de referência conhecidos. Esta etapa crucial geralmente requer transformações geodésicas complexas, representando um alto risco de erro para não especialistas.
O Qinertia aborda diretamente este desafio com seu geodesy engine integrado. Este engine apresenta um banco de dados abrangente de transformações públicas, permitindo a conversão de coordenadas de forma contínua e precisa. Ao lidar com todas as transformações de datum internamente, o engine do Qinertia elimina uma grande fonte de erro potencial. Ele garante que as posições derivadas de PPP sejam expressas automática e corretamente no sistema de coordenadas desejado pelo usuário, tornando todo o fluxo de trabalho, desde os dados brutos até os resultados utilizáveis e localizados, mais simples e confiável.
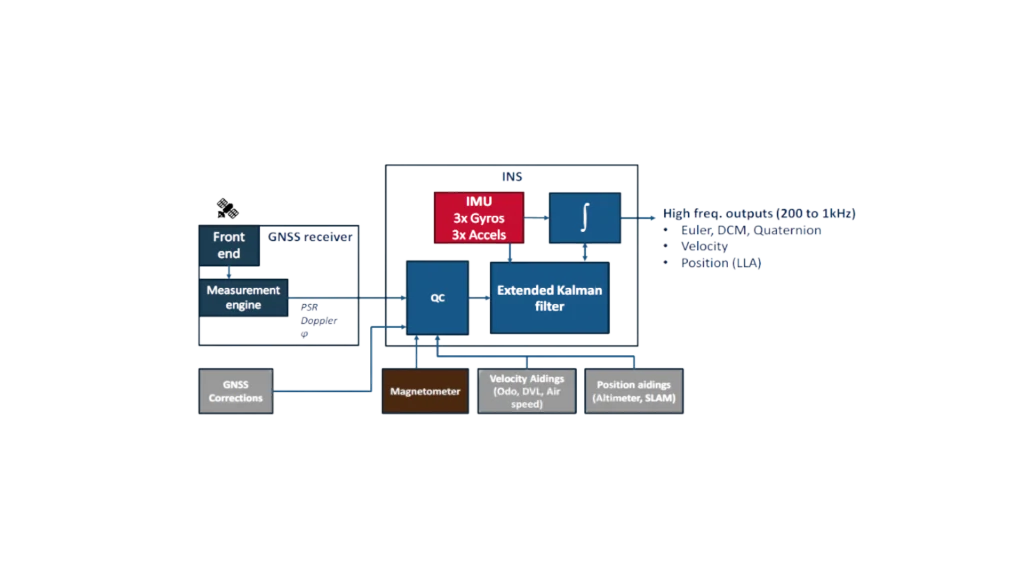
Tecnologia de Processamento: Fundindo Orbi AR com IMU para confiabilidade incomparável
O núcleo de processamento do Qinertia foi projetado para maximizar a confiabilidade do Orbi AR, emprega tecnologia forward, backward e merge, o que melhora o tempo de convergência, reduz o ruído e fortalece a confiabilidade.

Adicionalmente, o modo de processamento tight coupling PPP funde as medições brutas do receptor GNSS e as combina com uma IMU em um nível fundamental para uma solução de navegação mais robusta e contínua. O Tightly coupling com uma IMU fornece restrições adicionais, ajudando a reduzir os tempos de convergência e acelerando significativamente a reconvergência após a perda de sinal.
Orbi AR na Qinertia Cloud
Qinertia Cloud uma plataforma web avançada GNSS baseada em nuvem, desenvolvida pela Qinertia. Aproveitando a tecnologia Orbi AR de última geração, Qinertia Cloud seus GNSS brutos em resultados de alta precisão diretamente no seu navegador web.
Descubra o Qinertia Cloud