
高精度単点測位(Precise Point Positioning:PPP)におけるアンビギュイティレゾリューション(AR: ambiguity resolution)は、搬送波位相測定における整数 ambiguity を解決する方法です。主な目的は、PPPの精度をセンチメートルレベルからミリメートルレベルの信頼性に向上させることです。整数値の解決によって、PPPは測位精度を高め、収束時間を短縮することが可能となります。PPPとARを組み合わせた手法は、一般的にPPP-ARと呼ばれ、位相およびコードバイアスの精密モデル化や高精度な衛星クロック製品を活用しています。
ARのプロセスは、測定値の不確実性を低減し、位相測定を固定整数として扱うことを可能にします。これにより、測位の信頼性と精度が向上します。私たちは、複数の解析センターで生成された位相バイアス製品の相互運用性およびクロスバリデーションを調査しました。この分析の目的は、標準の一貫性を促進し、結果の統合を容易にし、リアルタイムの実装を促進することにあります。
実際の運用において、PPPにおけるARは、収束速度の向上、固定解率(Fix Rate)の改善、測位の整合性の強化に寄与することが示されています。特に信号環境が厳しい条件下でも効果を発揮します。GNSSコンステレーションの拡大やモデリング技術の進歩により、AR(ambiguity resolution) を組み合わせたPPPは、測量から自動航法まで、高精度アプリケーションにおける重要な手法として注目されています。
SBG Systemsは、新技術Orbi AR(Ambiguity Resolution)を開発しました。これは、ローカルの基準局や密集した地上インフラに依存せずに、GNSS単独でセンチメートルレベルの精度を提供する技術です。
なぜRTKではなくOrbi ARを使用するか?
このセクションでは、展開の迅速性、運用上の強靭性、ユーザー体験など、現場での選択に影響を与える重要な要素を検討し、従来のRTKの制約に比べ、Orbi ARの汎用性と利便性が選ばれる理由を明らかにします。
RTK – ディファレンシャルGNSS とは
RTKは、2台の受信機によって機能します。
- 基地局受信機(Base Station)は、既知の固定位置に設置され、受信したGNSS信号と自身の既知位置を比較して誤差を算出します。
- ロバー受信機(Rover:静止/動的)、近くの基地局から誤差補正情報を受信し、自身の信号に適用することで、非常に高精度な相対位置を算出します。
精度は非常に高いですが、ローバーは基地局から比較的近くにいる必要があります(大気条件にもよりますが、通常は10〜30 km程度)。これは、大気遅延などの多くの誤差が局所的であるためです。
Orbi AR – 高精度単点測位(PPP)
従来のRTKのように単一のローカル基地局を使って相対誤差を求めるのではなく、Orbi ARは、グローバルで利用可能な補正データを用いて、完全に独立して自らの絶対位置を高精度で算出します。このグローバル補正データには、高精度な衛星軌道とクロック情報、および大気遅延のモデルなどが含まれています。
| 特徴 | Orbi AR | RTK |
|---|---|---|
| ローカル基地局 | 不要 | 必要 |
| カバレッジ | グローバル | ローカル(単一基地局:30km以内、VRS:80km以内) |
| 精度 | 静止時:2~5cm(2σ) 移動時:2~3cm(1σ) | センチメートル(cm) |
| セットアップ | シンプル(受信機は1台のみ) | 複雑(ローカル基地局の設置が必要) |
簡単に言えば、その違いは、テスト勉強をする2人の生徒に例えることができます。RTKは、家庭教師をつけて勉強する学生のようなものです。家庭教はすでに正解を知っており、その経験をもとに生徒の間違いを修正します。
一方、Orbi ARは、一人で勉強しながら参考書で慎重に答えを確認する生徒に例えられます。家庭教師のほうがわずかに精度が高い場合もありますが、その分、導入は難しくコストも高くなります。どちらの方法も最終的には高精度な結果を得られますが、補正情報をどのように取得するか、近くの家庭教師(RTK)から得るのか、それとも世界中で利用可能な参考書(PPP)を使うか、という点が両者の本質的な違いです。
Orbi ARはどのように機能するのか?
標準的なGNSS受信機は、いくつかの大きな誤差の影響を受けます。
- 衛星軌道誤差: 衛星は、放送メッセージで示されている位置に正確に存在しているわけではありません。
- 衛星時計誤差: 衛星に搭載された原子時計には、ごくわずかではあるものの、測位に影響を与えるタイミング誤差があります。
- 大気遅延: 電離層および対流圏によって、GNSS信号は遅延・屈折します。
これらの伝送誤差や時間誤差が組み合わさることて、受信機が算出する位置に誤差が生じます。詳細については、GNSSの誤差要因や、大気誤差がRTK・PPK処理に与える影響を参照してください。
Orbi ARの基本原理は、上記の誤差を高精度な補正データによって精緻化(リファイン)することにあります。
- 国際GNSSサービス(IGS)は、各衛星の正確な軌道および時計誤差を極めて高い精度で算出します。
- グローバル基準局ネットワークは世界各地で運用され、軌道決定や衛星位相バイアス推定のための高度なアルゴリズムを適用します。
- 位相バイアスが生成された後、複数の制御局において専用の検証プロセスが実行され、補正セットに使用される各衛星測定値が管理・検証されます。
- デュアル周波数のGNSS観測を用いることで、電離層遅延を低減し、外部の電離層モデルに依存せずに電離層の影響を受けない測定値を取得します。
- 高度なモデリング技術により、対流圏遅延を推定し、数学的に解決します。

Orbi ARの主なメリット
Orbi ARは、高精度な地理空間データの取得・可視化・活用方法において本質的な進化をもたらす技術です。従来の衛星単独測位の制約を大きく超え、現場運用に新たな可能性を提供します。主なメリットは以下のとおりです。
- グローバルカバレッジ:会場のど真ん中、砂漠地帯、その他の遠隔地においても、ローカル基地局を必要とせずに、高精度測位を実現します。
- 高精度:センチメートルレベルの測位を提供します。※テストレポート近日公開予定
- 地域間での一貫性:世界中どの地域でも均一な精度を提供します。
- 高速収束:最新技術により、センチメートルレベルの精度に到達するまでの時間を短縮します。
- 高い拡張性(スケーラビリティ):ローカル基地局を必要としないため、大規模展開やグローバルアプリケーションに最適です。
- 費用対効果:地上の高密度な補正ネットワークへの依存を低減し、インフラコストを削減します。
QinertiaソフトウェアにおけるOrbi AR
後処理ソフトウェアQinertiaは、Orbi ARを独自のジオデジーエンジン(Geodesy Engine)および高度な処理技術と組み合わせることで、その性能をさらに高いレベルへ引き上げます。
ジオデジーエンジン(Geodesy Engine): Orbi AR の精度をローカル基準へ変換
Orbi ARによって得られる測位解は非常に高精度ですが、エンドユーザーにとって以前として大きな課題があります。それは、ITRF 2020座標系で得られた結果を、既知の基準点と比較可能なローカル測地基準系へ変換することです。この重要なステップでは、複雑な測地変換が必要とされる場合が多く、専門知識のないユーザーにとっては誤りが発生しやすい工程でもあります。
Qinertiaは、この課題に対し内蔵ジオデジーエンジンにより直接対応します。このエンジンは、公開されている各種座標変換パラメータを網羅した包括的なデータベースを搭載しており、シームレスかつ高精度な座標変換を実現します。すべての測地基準系変換を内部で一元的に処理することで、人的作業による変換ミスのリスクを大幅に低減します。その結果、PPPによって得られた測位結果は、ユーザーが指定する座標系へ自動かつ正確に変換されます。これにより、生データの処理から実用的なローカル座標成果の出力に至るまで、ワークフロー全体がよりシンプルで信頼性の高いものとなります。
処理技術:Orbi ARとIMUの融合による高信頼性
Qinertiaの処理コアは、Orbi ARの信頼性を最大限に引き出すよう設計されています。フォワード処理、バックワード処理、マージ処理を組み合わせる高度なアルゴリズムを採用しています。これにより、収束時間の短縮、ノイズ低減、信頼性の向上を実現します。

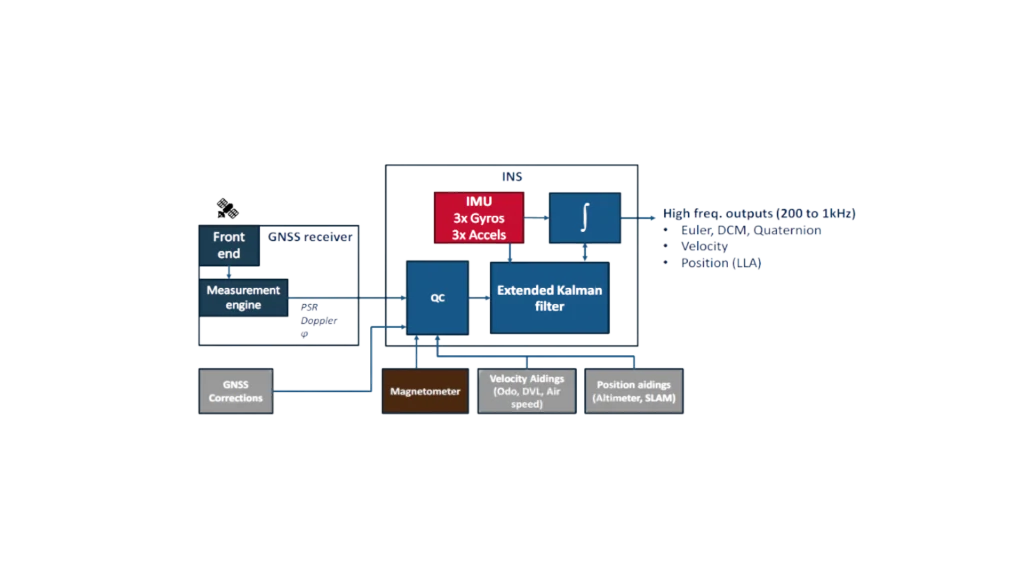
さらに、Qinertiaの処理モードであるタイトカップリングPPPでは、GNSS受信機からの生観測データをIMUと基本レベルで融合し、より堅牢で連続性の高いナビゲーションソリューションを実現します。IMUとのタイトカップリングは、追加の拘束条件(Constraints)が得られ、収束時間の短縮、信号途絶後の再収束の大幅な高速化が可能にします。
Qinertia CloudにおけるOrbi AR
Qinertia Cloudは、Qinertiaを基盤とする高度なクラウド型GNSS後処理ウエブプラットフォームです。最先端のOrbi AR技術を活用し、生のGNSSデータをウェブブラウザ上で直接、高精度な測位結果へと変換します 。
Qinertia Cloudを体験しましょう。