
La résolution d'ambiguïtés dans la technologie de positionnement ponctuel précis (PPP) est une méthode qui résout les ambiguïtés entières dans les mesures de phase porteuse. L'objectif principal est de faire passer le PPP d'une précision de l'ordre du centimètre à une fiabilité de l'ordre du millimètre. Le déverrouillage de ces valeurs entières permet au PPP d'améliorer la précision du positionnement et de réduire les temps de convergence. L'approche qui combine le PPP avec la résolution d'ambiguïtés (AR), souvent appelée PPP-AR, exploite des biais de phase et de code soigneusement modélisés, ainsi que des produits d'horloge satellite de haute fidélité.
Le processus de résolution d'ambiguïtés sert à réduire les incertitudes et permet à l'estimateur de traiter les mesures de phase comme des entiers fixes. Ceci, à son tour, a pour effet d'améliorer la fiabilité et la précision. Nous avons étudié l'interopérabilité et la validation croisée des produits de biais de phase générés par plusieurs centres d'analyse. Le but de cette analyse est d'encourager des normes cohérentes, de faciliter la combinaison des résultats et de promouvoir la mise en œuvre en temps réel.
En pratique, la résolution d'ambiguïtés au sein du PPP s'est avérée accélérer la convergence, améliorer les taux de correction et renforcer l'intégrité de la position, même dans des conditions de signal difficiles. À mesure que les constellations GNSS se développent et que les techniques de modélisation s'améliorent, le PPP avec résolution d'ambiguïtés émerge comme un outil clé pour les applications de haute précision, allant de la topographie à la navigation autonome.
SBG Systems a développé une nouvelle technologie appelée Orbi AR (Ambiguity Resolution), qui offre une précision centimétrique avec le GNSS sans s'appuyer sur des stations de référence locales ou une infrastructure terrestre dense.
Pourquoi utiliser Orbi AR plutôt que RTK ?
Dans cette section, nous examinerons les facteurs critiques — notamment la rapidité de déploiement, la résilience opérationnelle et l'expérience utilisateur — qui font évoluer l'équilibre, fournissant une justification claire pour choisir la polyvalence et l'accessibilité d'Orbi AR par rapport aux contraintes conventionnelles du RTK dans les environnements de travail modernes et complexes.
RTK – GNSS différentiel
Le RTK fonctionne avec deux récepteurs :
- Un récepteur de station de base est installé à un emplacement fixe connu, il calcule les erreurs en comparant sa position connue au signal GNSS qu'il reçoit.
- Un rover (statique/cinématique) qui reçoit les corrections d'erreur d'un récepteur de station de base à proximité et les applique à son propre signal pour obtenir une position relative très précise.
La précision est très élevée, mais le rover doit être relativement proche de la station de base (généralement de 10 à 30 km selon les conditions atmosphériques), car de nombreuses erreurs (comme les retards atmosphériques) sont locales.
Orbi AR – Positionnement ponctuel précis
Au lieu d'utiliser une seule station de base locale pour trouver les erreurs relatives, Orbi AR utilise des données de correction disponibles globalement pour calculer sa propre position absolue avec une grande précision, de manière totalement indépendante. La correction globale comprend des informations très précises sur l'orbite et l'horloge des satellites, ainsi que des modèles pour les retards atmosphériques.
| Caractéristique | Orbi AR | RTK |
|---|---|---|
| Station de base locale | Non nécessaire | Nécessaire |
| Couverture | Globale | Locale (Base unique à moins de 30 km ; VRS à moins de 80 km) |
| Précision | Statique 2-5cm en 2 sigma Cinématique 2-3cm en 1 sigma | Centimètre (cm) |
| Configuration | Simple (un seul récepteur) | Complexe (nécessite une configuration de base locale) |
Pour simplifier, on peut imaginer la différence comme celle entre deux étudiants se préparant à un examen. Le RTK est comparable à un étudiant qui prend des cours particuliers, où l'un a déjà la bonne réponse et utilise son expérience pour aider l'autre à corriger ses erreurs.
Orbi AR, en revanche, est comme un étudiant travaillant seul mais vérifiant méticuleusement ses réponses à l'aide d'un livre. Bien que le tuteur privé puisse être légèrement plus précis, il est beaucoup plus difficile à mettre en place et plus coûteux. Et bien que les deux approches mènent à des résultats précis, la manière dont les corrections sont obtenues — via un tuteur à proximité (RTK) ou un livre disponible mondialement (PPP) — est ce qui les distingue.
Comment fonctionne Orbi AR ?
Un récepteur GNSS standard est affecté par plusieurs erreurs importantes :
- Erreurs d'orbite des satellites : Le satellite n'est pas exactement là où son message de diffusion indique qu'il est.
- Erreurs d'horloge des satellites : L'horloge atomique du satellite présente de minuscules, mais importantes, erreurs de synchronisation.
- Retards atmosphériques : L'ionosphère et la troposphère ralentissent et courbent les signaux GNSS.
Ces erreurs de transmission et de synchronisation se combinent pour produire des inexactitudes dans la position calculée par le récepteur. Pour plus d'explications, consultez le GNSS et ses sources d'erreurs et l'effet des erreurs atmosphériques sur le traitement RTK et PPK.
Le principe fondamental d'Orbi AR est d'affiner les erreurs ci-dessus en utilisant des données de correction précises :
- L'International GNSS Service-IGS calcule l'orbite exacte et l'erreur d'horloge exacte pour chaque satellite avec une extrême précision.
- Un Réseau Mondial de Stations de Référence opère dans toutes les régions et applique des algorithmes complexes pour la détermination d'orbite et l'estimation du biais de phase des satellites.
- Une fois le biais de phase généré, une étape de vérification dédiée est effectuée dans plusieurs stations de contrôle, contrôlant chaque mesure de satellite utilisée avec l'ensemble des corrections.
- Utilise des observations GNSS bi-fréquence pour atténuer le délai ionosphérique, obtenir des mesures sans ionosphère sans recourir à des modèles ionosphériques externes.
- Une modélisation avancée est appliquée pour estimer et résoudre mathématiquement le délai dû à la troposphère.

Principaux avantages d'Orbi AR
Orbi AR représente une avancée fondamentale dans la manière dont les données géospatiales précises sont collectées, visualisées et utilisées sur le terrain, allant bien au-delà des contraintes traditionnelles du positionnement par satellite uniquement. Voici les principaux avantages d'Orbi AR :
- Couverture mondiale : atteindre une haute précision au milieu de l'océan, dans un désert ou dans tout autre endroit isolé sans avoir besoin d'une station de base locale.
- Haute précision : fourniture d'un positionnement au niveau centimétrique [Rapport de test à venir prochainement]
- Cohérence entre les régions : fournir une précision uniforme dans le monde entier.
- Temps de convergence rapide : une technique moderne réduit le temps nécessaire pour atteindre une précision centimétrique.
- Évolutivité : idéal pour les applications grand public et mondiales, car aucune station de référence locale n'est requise.
- Rentabilité : réduire la dépendance aux réseaux denses de correction au sol, ce qui diminue les coûts d'infrastructure.
Orbi AR dans le logiciel Qinertia
Qinertia, le logiciel de post-traitement, fait passer Orbi AR au niveau supérieur en le combinant avec le moteur de géodésie et les technologies de traitement de Qinertia.
Moteur de géodésie : Transformer la précision d'Orbi AR en contexte local
Bien que les solutions Orbi AR fournissent des positions très précises, un défi important subsiste pour les utilisateurs finaux : traduire ces résultats de l'ITRF 2020 vers un datum local pour les comparer avec des points de référence connus. Cette étape cruciale nécessite souvent des transformations géodésiques complexes, ce qui pose un risque élevé d'erreur pour les non-experts.
Qinertia relève directement ce défi grâce à son moteur de géodésie intégré. Ce moteur comprend une base de données complète de transformations publiques, permettant une conversion de coordonnées transparente et précise. En gérant toutes les transformations de datum en interne, le moteur de Qinertia élimine une source majeure d'erreur potentielle. Il garantit que les positions dérivées du PPP sont automatiquement et correctement exprimées dans le système de coordonnées souhaité par l'utilisateur, ce qui rend l'ensemble du workflow, des données brutes aux résultats utilisables et localisés, à la fois plus simple et plus fiable.
Technologie de traitement : Fusion d'Orbi AR avec une IMU pour une fiabilité inégalée
Le cœur de traitement de Qinertia est conçu pour maximiser la fiabilité d'Orbi AR. Il utilise une technologie de passage aller, retour et fusion, ce qui améliore le temps de convergence, réduit le bruit et renforce la fiabilité.

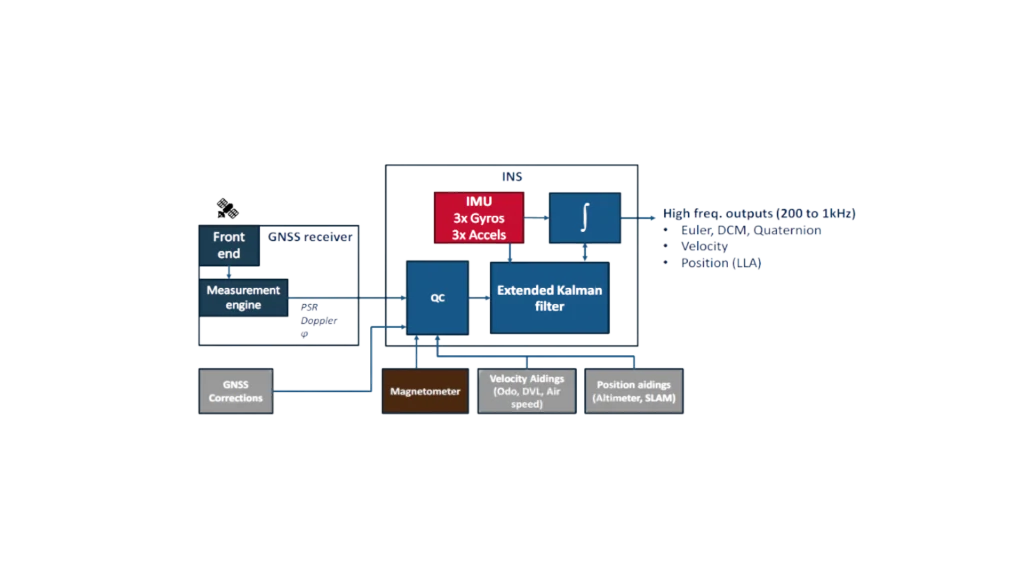
De plus, le mode de traitement à couplage étroit PPP fusionne les mesures brutes du récepteur GNSS et les combine avec une IMU à un niveau fondamental pour une solution de navigation plus robuste et continue. Le couplage étroit avec une IMU fournit des contraintes supplémentaires, aidant à réduire les temps de convergence et accélérant considérablement la reconvergence après une perte de signal.
Orbi AR dans Qinertia Cloud
Qinertia Cloud une plateforme web avancée GNSS basée sur le cloud, développée par Qinertia. Grâce à la technologie Orbi AR de pointe, Qinertia Cloud vos GNSS brutes en résultats de haute précision directement dans votre navigateur web.
Découvrez Qinertia Cloud